






书接上回 > DRV8701芯片数据手册整理第一篇
第一篇博文的补充部分
关于DRV8701的驱动控制接口,见下表(P和E两个型号都列出来了)
| 端口名称 | 描述 | |||||
|---|---|---|---|---|---|---|
| nSLEEP | EN | PH | SH1 | SH2 | AVDD/DVDD | 描述 |
| 0 | × | × | 高阻抗 | 高阻抗 | Disabled | 睡眠模式,H桥电路也在高阻态的模式 |
| 1 | 0 | × | L | L | Enabled | 制动模式,但是是慢速的制动 |
| 1 | 1 | 0 | L | H | Enabled | 反转模式,电流从SH2流向SH1 |
| 1 | 1 | 1 | H | L | Enabled | 正转模式,电流从SH1流向SH2 |
| 端口名称 | 描述 | |||||
|---|---|---|---|---|---|---|
| nSLEEP | IN1 | IN2 | SH1 | SH2 | AVDD/DVDD | 描述 |
| 0 | × | × | 高阻态 | 高阻态 | Disabled | 睡眠模式,H桥电路也在高阻态的模式 |
| 1 | 0 | 0 | 高阻态 | 高阻态 | Enableed | 摆烂模式,它上一个时间点如果轮子向前转,那么这个时间点轮子还是向前转,如果没有机械内阻,它是不会停下来的。H桥处在高阻态的模式 |
| 1 | 0 | 1 | L | H | Enabled | 反转模式,电流从SH2流向SH1 |
| 1 | 1 | 0 | H | L | Enabled | 正转模式,电流从SH1流向SH2 |
| 1 | 1 | 1 | L | H | Enabled | 制动模式,但是是慢速的制动 |
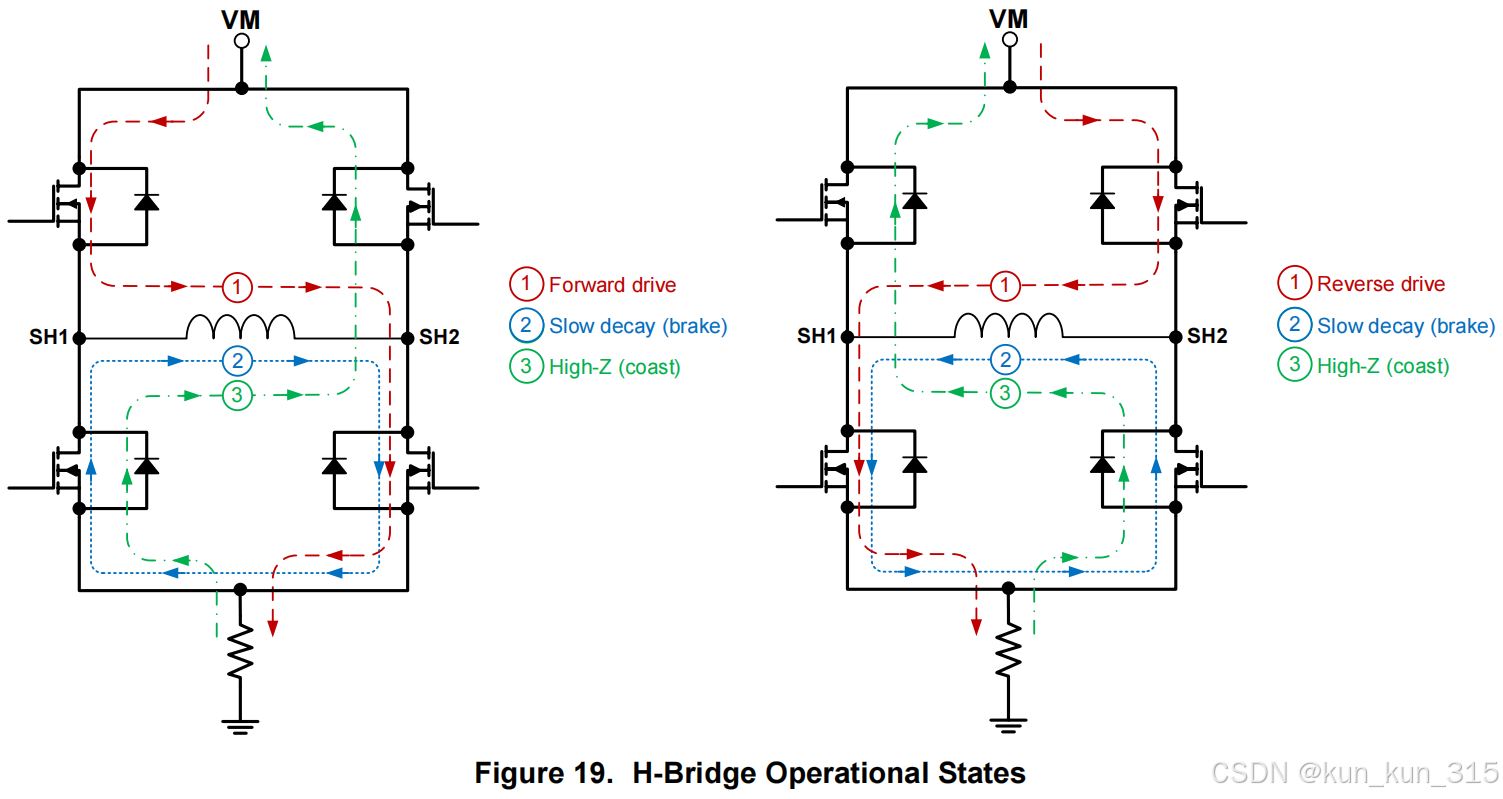
上面两张表是罗列出来的控制方式,下面列出H桥控制电机的原理图,出自数据手册,仅作了解即可,如图所示
第一篇部分的补充就这些,接下来开始进入第二篇的重点部分,在开始之前,感谢嘉立创每月都能让我们免费打板两次。原理图和PCB设计我都是采用的嘉立创做的,因为本人并不是学硬件设计这块的,所以如果画的有错误的地方或不合理的地方请指出,共同进步。
原理图部分
DRV8701E部分
同时感谢TI和逐飞科技开源的原理图,我的原理图是根据他们提供的原理图自己做过修改的,用下来没有什么问题。我也会将我画的原理图上传到我的资源,有需要的小伙伴可以自行下载。
我采用的是DRV8701E这个型号,原理图如下所示
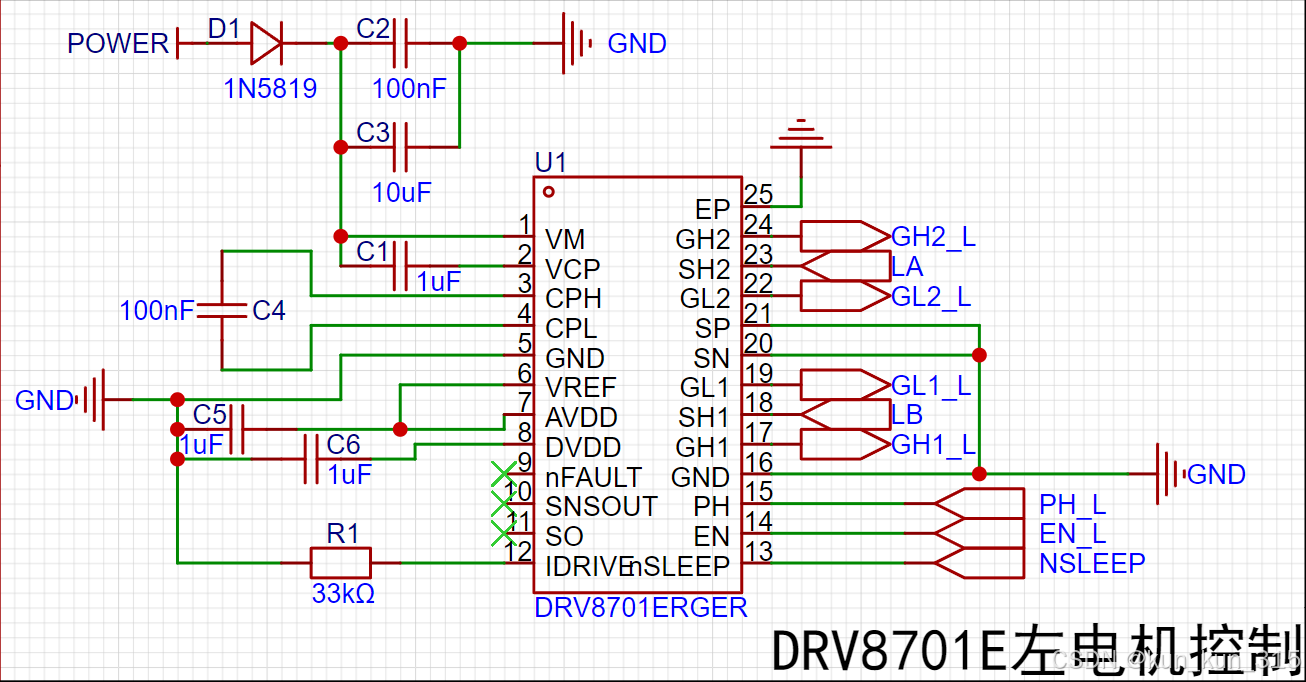
原理图中,三个引脚直接作舍弃处理,用不着,这里在贴出官方给的参考原理图,如下。
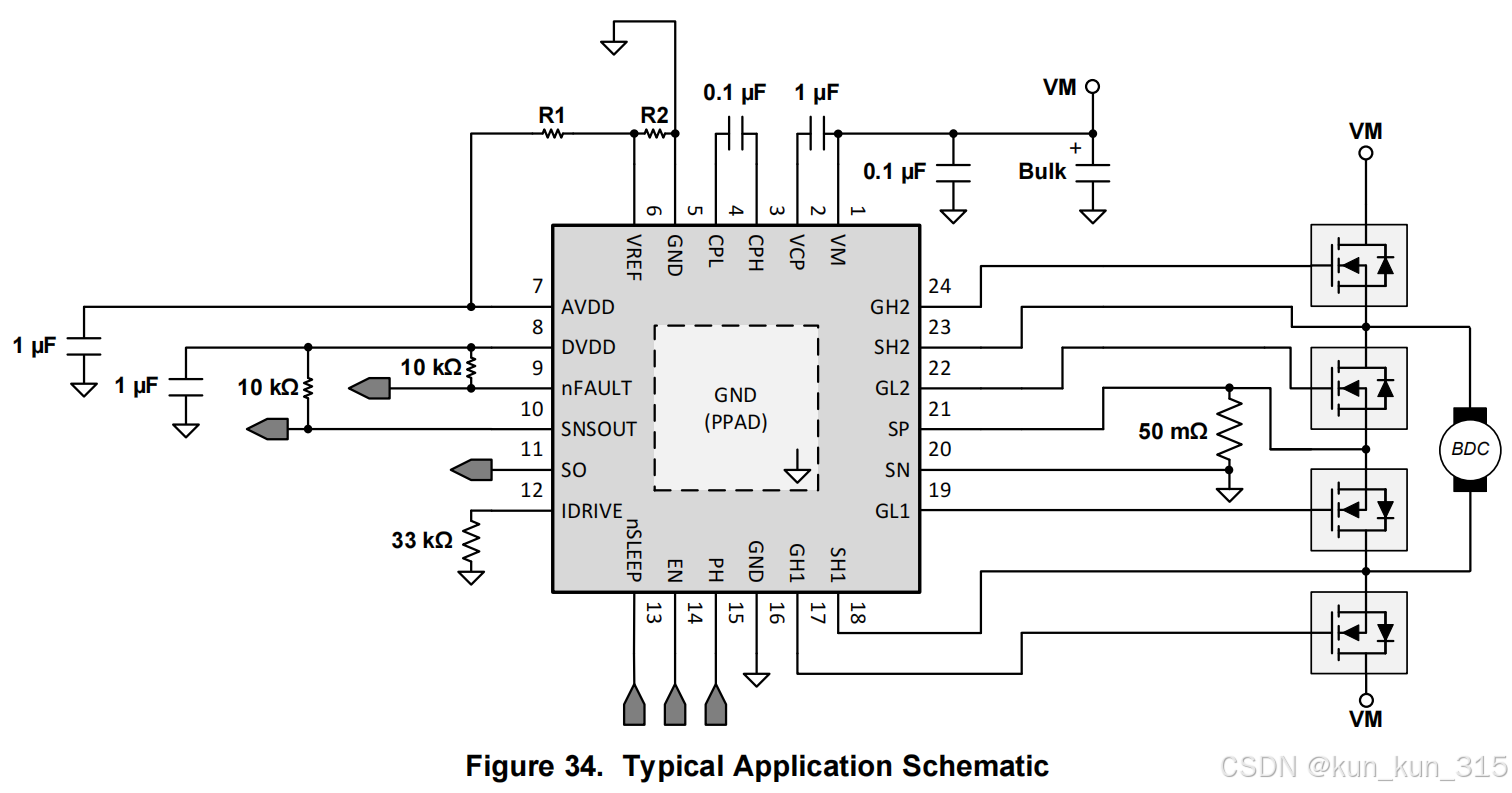
除了nFAULT、SNOUT和SO三个外,SP和SN两个引脚也做了一点小改动,官方将SP引脚分别接到了两个场效应管的源极和漏极,然后还加了个限流电阻导向地,我的原理图中就不检测了,因为我的SO引脚是断开的,SP和SN直接接地就好了。
官方给的Bulk电容(滤波/储能电容),我采用的是10uF,配合0.1uF的电容做滤波和储能处理,原理图应该是10uf在上,0.1uF在下面,我的原理图中有一点点小错误,这里稍微动一下,先让大电容滤波,再让小电容进行细节的滤波。对照着原理图的时候,如果有些引脚还不清楚是什么含义的话可以翻看我上一面博文。
做硬件设计的小伙伴大家应该知道,右上角有个EP的含义,这里说明一下我接地是因为最后检查DRC的时候不会报错,实际含义是指,DRV8701E这颗芯片必须要对他进行散热处理。可以在做PCB设计的时候在焊盘区域打孔散热。
供给芯片电压的时候,做了一个防反窜的保护二极管保护电路。
H桥部分
直接上图
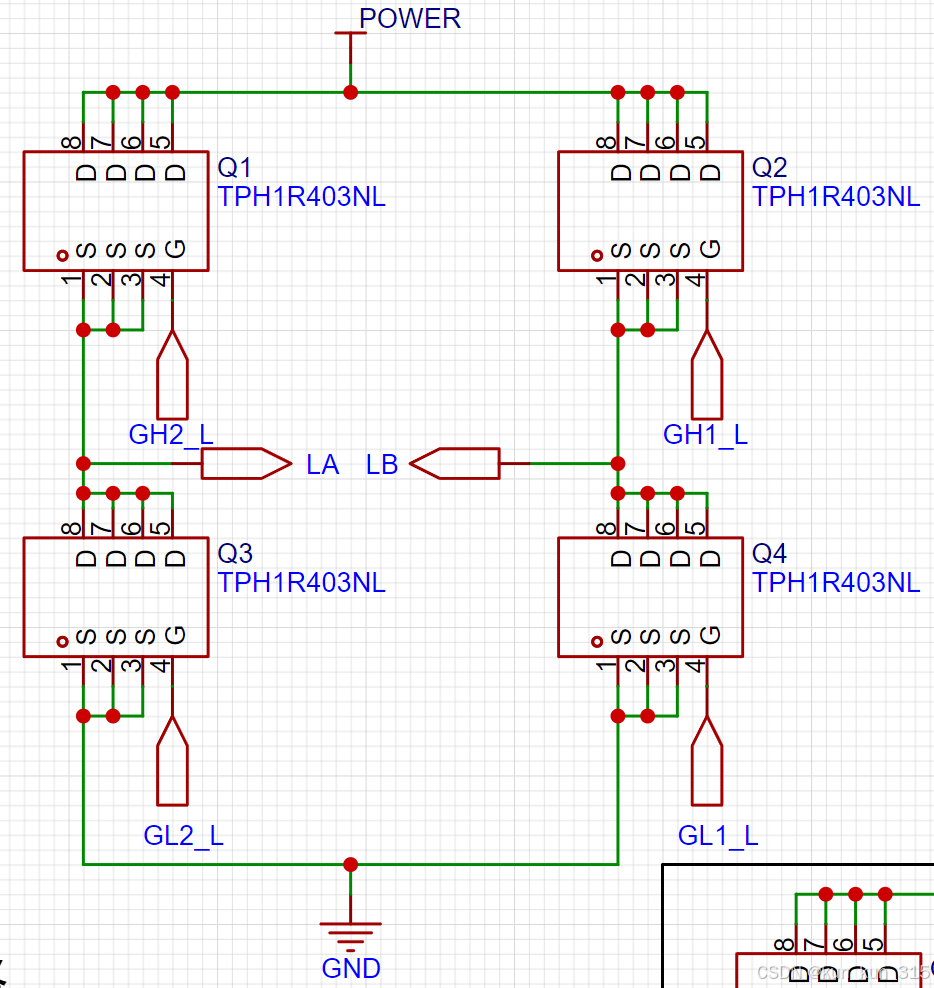
图中LA和LB就是电机,这个TPH1R403NL场效应管我是照着开源搬过来的,了解了一下,大概意思就是这个场效应管在导通的时候,对于电流的损耗少,感兴趣的同学可以下载它的手册,我也会把手册放在我的资源库中。
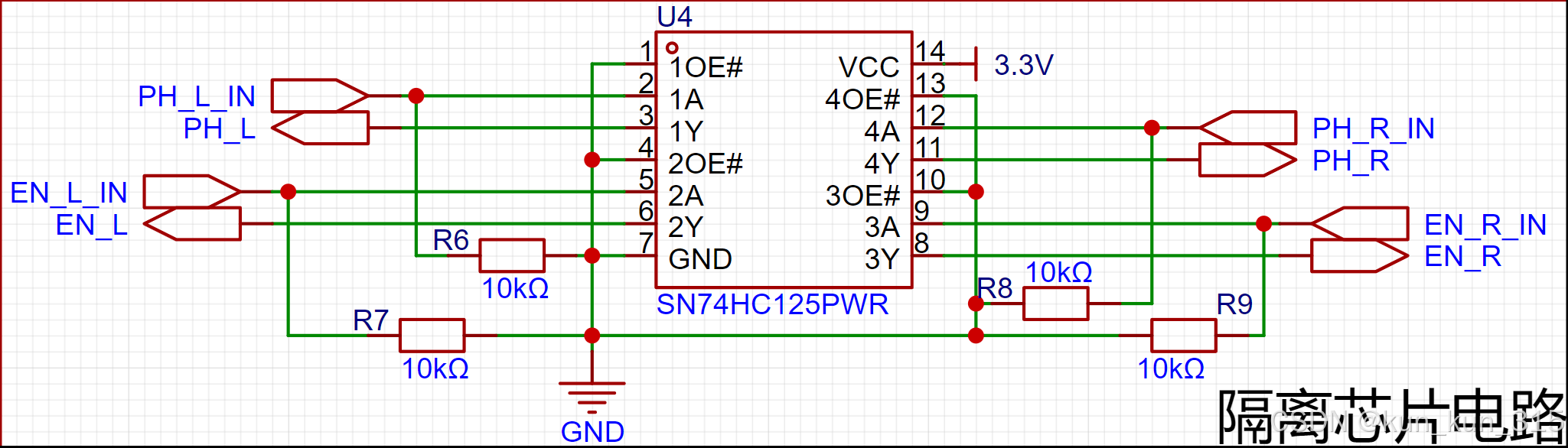
隔离芯片部分
为了防止左右电机在未知情况下电流乱窜导致炸板,我在里面加入了隔离的机制,因为隔离芯片对工作电压稳定性要求比较高。我直接用图展示一下它的一些简单特性和原理图,如图所示。
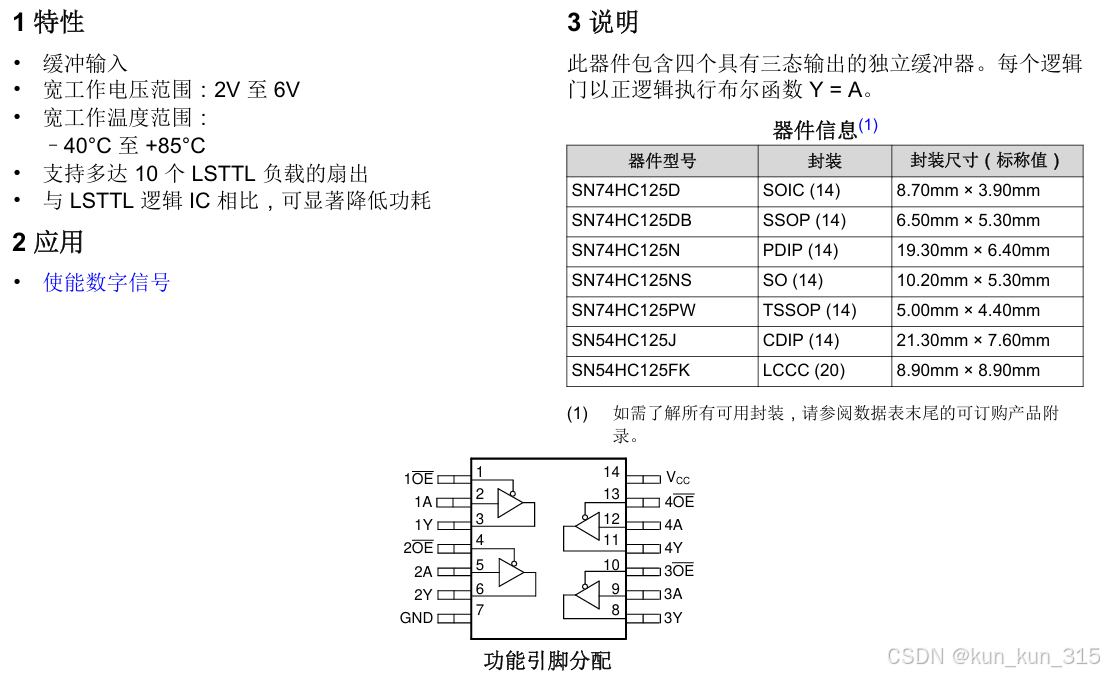
SN74HC125PWR它的工作电压只能在2v至6v之间,在上一篇中提到DRV8701上有两个专门对外提供电压的引脚AVDD和DVDD,结合手册上说明AVDD提供4.8V,DVDD提供3.3V,我的第一版原理图中就将隔离芯片接到了DVDD上,但是我车有的时候跑着跑着轮子就不能反转了,一路排查下来,最后用示波器量出了,进来的PH信号是正常可以跳变的,但是经过三态芯片出去的信号一直都是高阻态,换了一颗芯片后,问题又立马被解决了,最后将原来连接到DVDD的3.3V引脚通过飞线引导了稳定的3.3V引脚上后,问题就再也没有出现过了,所以在我这一版的原理图中我又在电源进来的时候做了一个转压的芯片,如果对这个方案感兴趣的话可以参考我上传的原理图。
结语
至此,DRV芯片部分就已经完成全部的讲解了,PCB设计因人而异,如果大家感兴趣的话可以可以转到我的资源进行下载。如果有错误之处还请指正说明,本人诚恳接受。
文档提供:TI、嘉立创
如有侵权联系我,立马删除。

















 8803
8803

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









