








NVIDIA CUDA Python编程框架–Warp开发文档
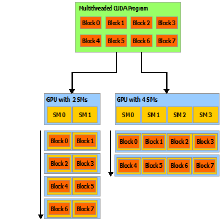
Warp 是一个用于编写高性能模拟和图形代码的 Python 框架。 Warp 采用常规 Python 函数,JIT 将它们编译为可以在 CPU 或 GPU 上运行的高效内核代码。
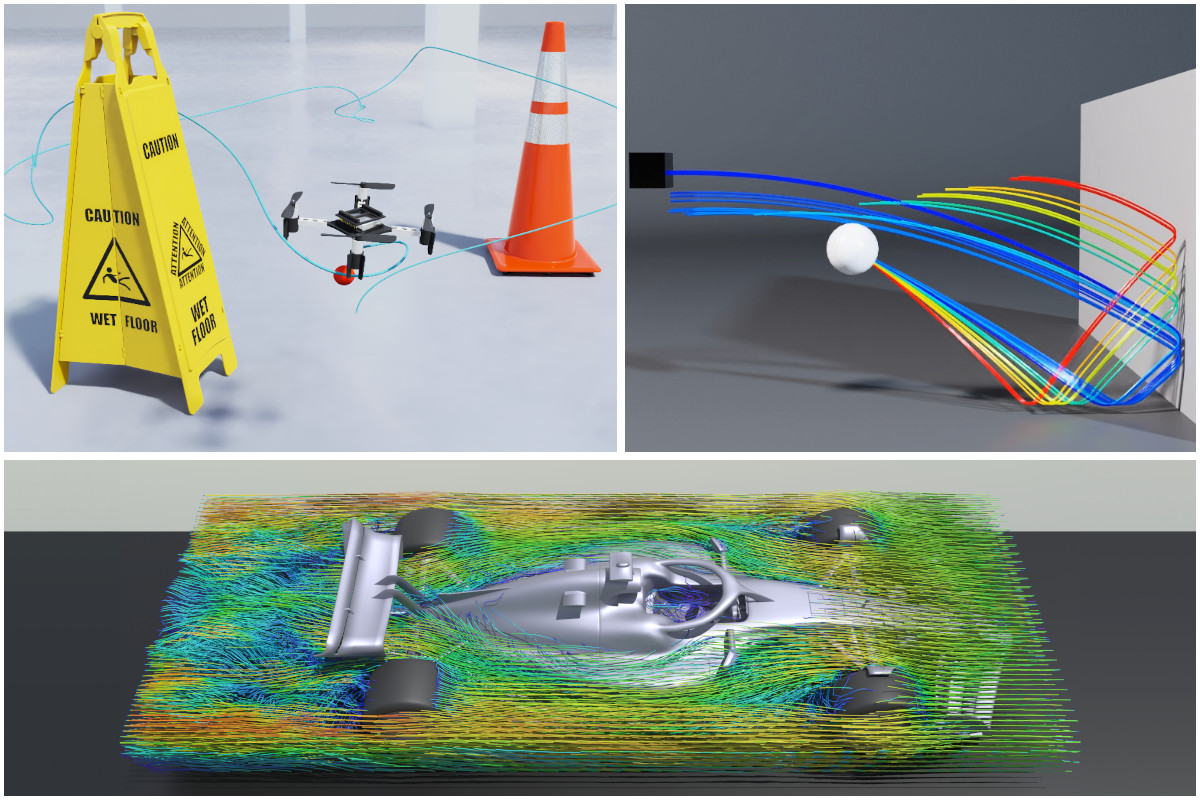
Warp 专为空间计算而设计,并附带一组丰富的原语,可以轻松编写物理模拟、感知、机器人和几何处理程序。 此外,Warp 内核是可微分的,可以用作 PyTorch 和 JAX 等框架的机器学习管道的一部分。
以下是使用 Warp 实现的模拟的一些示例:
快速开始
Warp 支持 Python 3.7 及以上版本。 它可以在 Windows、Linux 和 macOS 上的 x86-64 和 ARMv8 CPU 上运行。 GPU 支持需要支持 CUDA 的 NVIDIA GPU 和驱动程序(最低 GeForce GTX 9xx)。
安装 Warp 最简单的方法是通过 PyPI:
$ pip install warp-lang
发布页面上还提供了预构建的二进制包。 要在本地 Python 环境中安装,请提取存档并从根目录运行以下命令:
$ pip install .
基本示例
下面给出了计算随机 3D 向量长度的第一个程序示例:
import warp as wp
import numpy as np
wp.init()
num_points = 1024
@wp.kernel
def length(points: wp.array(dtype=wp.vec3),
lengths: wp.array(dtype=float)):
# thread index
tid = wp.tid()
# compute distance of each point from origin
lengths[tid] = wp.length(points[tid])
# allocate an array of 3d points
points = wp.array(np.random.rand(num_points, 3), dtype=wp.vec3)
lengths = wp.zeros(num_points, dtype=float)
# launch kernel
wp.launch(kernel=length,
dim=len(points),
inputs=[points, lengths])
print(lengths)
其他示例
Github 存储库中的示例目录包含许多脚本,这些脚本展示了如何使用 Warp API 实现不同的模拟方法。 大多数示例将在与示例相同的目录中生成包含时间采样动画的 USD 文件。 在运行示例之前,用户应确保使用以下命令安装了 usd-core 软件包:
pip install usd-core
可以从命令行运行示例,如下所示:
python -m warp.examples.<example_subdir>.<example>
大多数示例可以在 CPU 或支持 CUDA 的设备上运行,但少数示例需要支持 CUDA 的设备。 这些标记在示例脚本的顶部。
USD 文件可以在 NVIDIA Omniverse、Pixar 的 UsdView 和 Blender 中查看或渲染。 请注意,不建议在 macOS 中使用预览,因为它对时间采样动画的支持有限。
内置单元测试可以从命令行运行,如下所示:
python -m warp.tests
注意: 下方示例点击图片可以直接跳转到示例代码
在以后章节中会逐步更新编程细节
examples/core#
 |  |  |  |
dem | fluid | graph capture | marching cubes |
 |  |  |  |
mesh | nvdb | raycast | raymarch |
 |  |  | |
sph | torch | wave |
examples/fem#
 |  |  |  |
apic fluid | convection diffusion | diffusion 3d | diffusion |
 |  |  |  |
mixed elasticity | navier stokes | stokes transfer | stokes |
examples/optim#
 |  |  |  |
bounce | cloth throw | diffray | drone |
 |  |  |  |
inverse kinematics | spring cage | trajectory | walker |
examples/sim#
 |  |  |  |
cartpole | cloth | granular | granular collision sdf |
 |  |  |  |
jacobian ik | quadruped | rigid chain | rigid contact |
 |  |  |  |
rigid force | rigid gyroscopic | rigid soft contact | soft body |



















 555
555

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











