







1. 目标
这一部分主要是讲解编写贪吃蛇AI所需要用到的算法基础。
2. 问题分析
贪吃蛇AI说白了就是寻找一条从蛇头到食物的一条最短路径,同时这条路径需要避开障碍物,这里仅有的障碍就是蛇身。而A star 算法就是专门针对这一个问题的。在A star 算法中需要用到排序算法,这里采用堆排序(当然其他排序也可以),如果对堆排序不熟悉的朋友,请移步到这里——堆排序,先看看堆排序的内容。
3. A*算法
A star(也称A*)搜寻算法俗称A星算法。这是一种在图形平面上,有多个节点的路径,求出最低通过成本的算法。常用于游戏中对象的移动计算上。A* 算法是一种启发式搜寻算法,有别于DFS, BFS搜索。可以这样理解“启发式”的涵义,比如从起点A到达目的地B的路线,并不是直接告诉你,从A出发,向东行驶200米,右转进入XX路,直行500米到达B;而是从A出发,直行,直到遇到第一家肯德基,右转直到看到B大厦。而A*算法中用来启发的线索就是移动成本,也就是权重。
3.1 移动成本
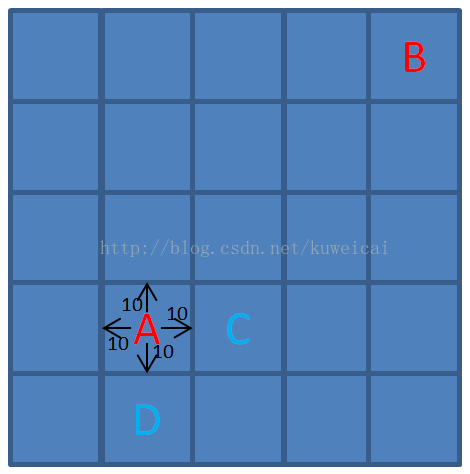
如下图所示,从A点出发,可以有四个方向可走(由于贪吃蛇仅仅可以走上下左右四个方向,所以这里不考虑走斜线的情况),假设每个方向移动一格的成本为10,A*算法中采用的F值来评价移动成本,F=G+H。假设节点C是待考察的一个点,G代表的是从起点A到C的移动成本,如下图的情况G=10。那么H代表的就是从C点到目标B点的移动代价的预估值,如下图的情况H=50,那么F=60。为什么说是预估,因为现在对于从C点到B点的情况还不清楚,因为中间可能存在障碍物,那么实际的移动代价就会大于预估的情况。而对于待考察点D,其F=80,显然在C 和D点中(当然这里待考察的点不止C和D点),A*算法会选择C点。
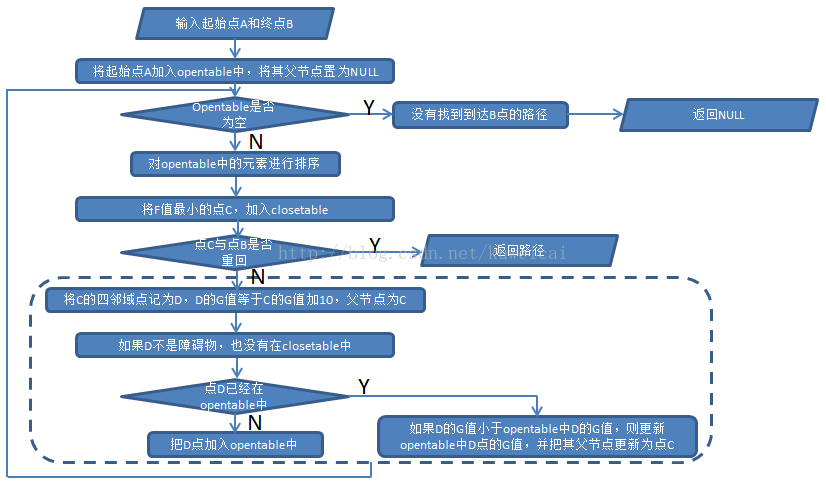
3.2 算法流程图
4. 源代码
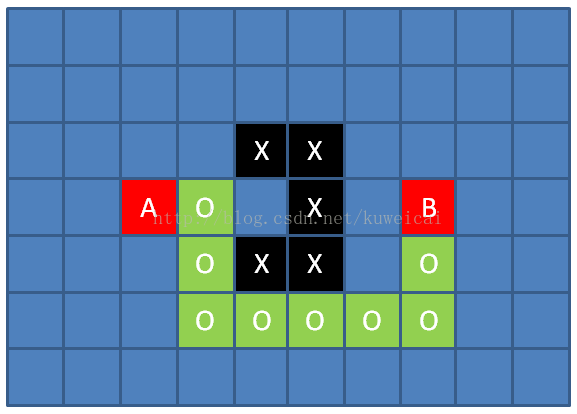
代码中假定起始点A(5,10),食物B(5,15),如下图。其中‘X’代表障碍物,‘O’代表的就是寻找到的从A到B的路径。
#include<stdio.h>
#include<stdlib.h>
#define N 32
#define W 10
typedef struct STARNODE{
int x;//节点的x,y坐标
int y;
int G;//该节点的G, H值
int H;
int is_snakebody;//是否为蛇身,是为1,否则为0;
int in_open_table;//是否在open_table中,是为1,否则为0;
int in_close_table;//是否在close_table中,是为1,否则为0;
struct STARNODE* ParentNode;//该节点的父节点
} starnode, *pstarnode;
starnode mapnode[N/2+2][N+4];
pstarnode opentable[N*N/2];
pstarnode closetable[N*N/2];
int opennode_count=0;
int closenode_count=0;
starnode food;
//根据指针所指向的节点的F值,按大顶堆进行调整
void heapadjust(pstarnode a[], int m, int n)
{
int i;
pstarnode temp=a[m];
for(i=2*m;i<=n;i*=2)
{
if(i+1<=n && (a[i+1]->G+a[i+1]->H)>(a[i]->G+a[i]->H) )
{
i++;
}
if((temp->G+temp->H)>(a[i]->G+a[i]->H))
{
break;
}
a[m]=a[i];
m=i;
}
a[m]=temp;
}
void swap(pstarnode a[],int m, int n)
{
pstarnode temp;
temp=a[m];
a[m]=a[n];
a[n]=temp;
}
void crtheap(pstarnode a[], int n)
{
int i;
for(i=n/2;i>0;i--)
{
heapadjust(a, i, n);
}
}
void heapsort(pstarnode a[], int n)
{
int i;
crtheap(a,n);
for(i=n;i>1;i--)
{
swap(a,1,i);
heapadjust(a, 1,i-1);
}
}
//x1, y1是邻域点坐标
//curtnode是当前点坐标
void insert_opentable(int x1, int y1, pstarnode pcurtnode)
{
int i;
if(!mapnode[x1][y1].is_snakebody && !mapnode[x1][y1].in_close_table)//如果不是蛇身也不在closetable中
{
if(mapnode[x1][y1].in_open_table && mapnode[x1][y1].G>pcurtnode->G+W)//如果已经在opentable中,但是不是最优路径
{
mapnode[x1][y1].G=pcurtnode->G+W;//把G值更新
mapnode[x1][y1].ParentNode=pcurtnode;//把该邻点的双亲节点更新
//由于改变了opentable中一个点的F值,需要对opentable中的点的顺序进行调整,以满足有序
for(i=1;i<=opennode_count;i++)
{
if(opentable[i]->x==x1 && opentable[i]->y==y1)
{
break;
}
heapsort(opentable, i);
}
}
else//把该点加入opentable中
{
opentable[++opennode_count]=&mapnode[x1][y1];
mapnode[x1][y1].G=pcurtnode->G+W;
mapnode[x1][y1].H=(abs(food.x-x1)+abs(food.y-y1))*W;
mapnode[x1][y1].in_open_table=1;
mapnode[x1][y1].ParentNode=pcurtnode;
heapsort(opentable, opennode_count);
}
}
}
//寻找当前点的四邻域点,把符合条件的点加入opentable中
void find_neighbor(pstarnode pcurtnode)
{
int x=pcurtnode->x;
int y=pcurtnode->y;
if(x+1<=N/2)
{
insert_opentable(x+1, y, pcurtnode);
}
if(x-1>=1)
{
insert_opentable(x-1, y, pcurtnode);
}
if(y+1<=N+1)
{
insert_opentable(x,y+1, pcurtnode);
}
if(y-1>=2)
{
insert_opentable(x,y-1, pcurtnode);
}
}
int search_road(pstarnode startnode, pstarnode endnode)
{
int is_search_road=0;
opennode_count=0;
closenode_count=0;
pstarnode pcurtnode;
opentable[++opennode_count]=startnode;//起始点加入opentable中
startnode->in_open_table=1;
startnode->ParentNode=NULL;
startnode->G=0;
startnode->H=(abs(endnode->x-startnode->x)+abs(endnode->y-startnode->y))*W;
if(startnode->x==endnode->x && startnode->y==endnode->y)//如果起点和终点重合
{
is_search_road=1;
return is_search_road;
}
while(1)
{
//取出opentable中第1个节点加入closetable中
pcurtnode=opentable[1];
opentable[1]=opentable[opennode_count--];
closetable[++closenode_count]=pcurtnode;
pcurtnode->in_open_table=0;
pcurtnode->in_close_table=1;
if(pcurtnode->x==endnode->x && pcurtnode->y==endnode->y)
{
is_search_road=1;
break;
}
find_neighbor(pcurtnode);
if(!opennode_count)//如果opentable已经为空,即没有找到路径
{
break;
}
}
return is_search_road;
}
int main(void)
{
int i, j;
pstarnode startnode;
for(i=0;i<N/2+2;i++)
for(j=0;j<N+4;j++)
{
mapnode[i][j].G=0;
mapnode[i][j].H=0;
mapnode[i][j].in_close_table=0;
mapnode[i][j].in_open_table=0;
mapnode[i][j].is_snakebody=0;
mapnode[i][j].ParentNode=NULL;
mapnode[i][j].x=i;
mapnode[i][j].y=j;
}
startnode=&mapnode[5][10];
food.x=5;
food.y=15;
mapnode[5][13].is_snakebody=1;
mapnode[6][13].is_snakebody=1;
mapnode[4][13].is_snakebody=1;
mapnode[4][12].is_snakebody=1;
mapnode[6][12].is_snakebody=1;
int flag;
flag=search_road(startnode, &food);
pstarnode temp=&mapnode[5][15];
do{
printf("%d %d\n",temp->x, temp->y);
temp=temp->ParentNode;
}while(temp);
return 0;
}














 527
527

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









