






 文章讲述了作者购买的EBO逗猫机器人改装过程,开始时通过简单电路增强动力,但发现电机驱动信号问题。作者随后升级到第二版,优化供电和驱动接口,实现单片机直驱电机并支持更多扩展功能,电路及程序均开源,提供了3D打印支架和相关文件链接。
文章讲述了作者购买的EBO逗猫机器人改装过程,开始时通过简单电路增强动力,但发现电机驱动信号问题。作者随后升级到第二版,优化供电和驱动接口,实现单片机直驱电机并支持更多扩展功能,电路及程序均开源,提供了3D打印支架和相关文件链接。
前言:
相信在疫情期间见了很多人做的4G小车,取外卖,取快递,买物资等用途,博主前段时间买了一个EBO逗猫机器人。就是他:

期初是为了逗猫玩的,
这个机器人4G低延迟图像,无线喊话,收听声音,操控移动全部齐全,因此我想用这个机器人改装一番,让其走出家门岂不美哉。
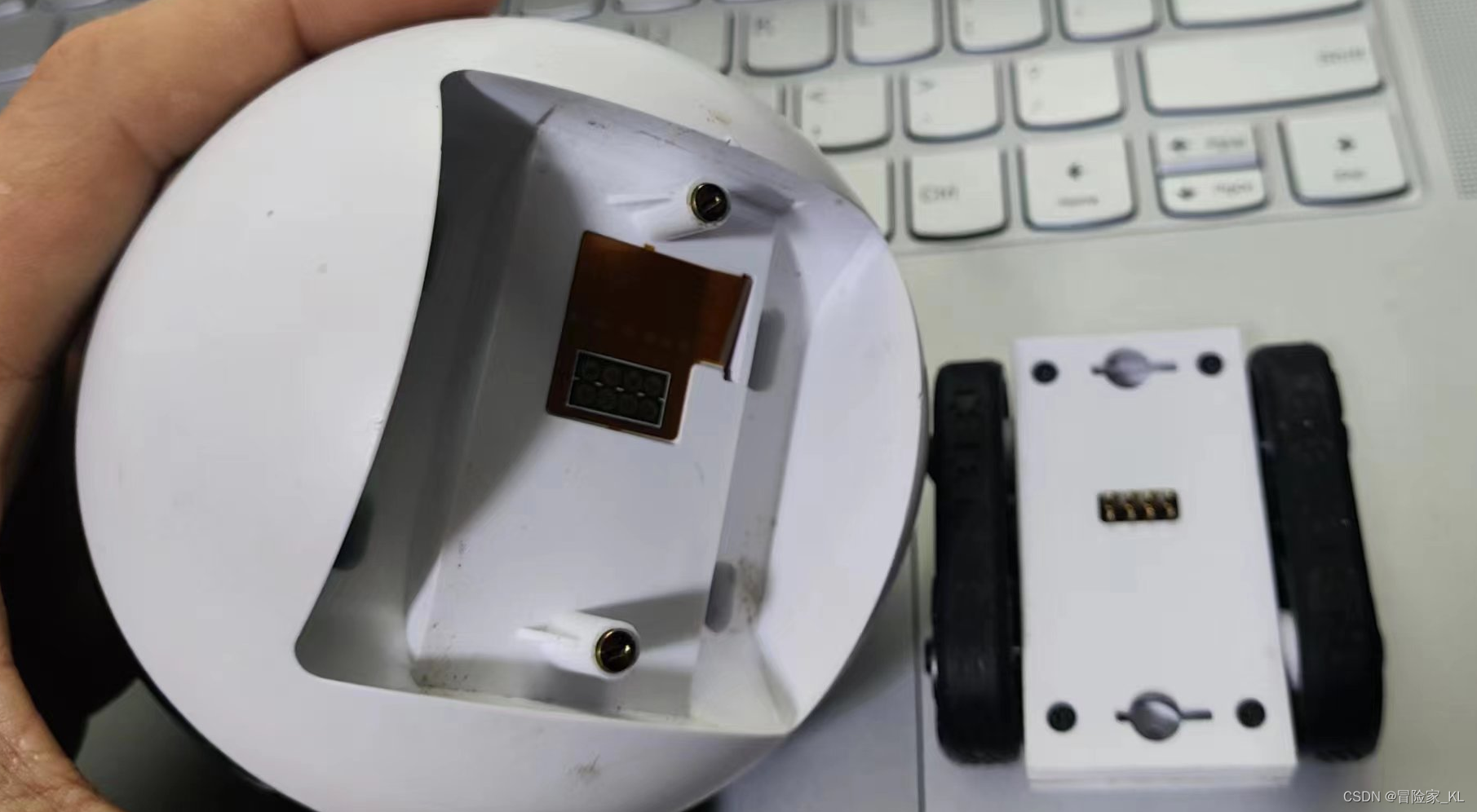
拆解研究
经过拆解,发现机器人底盘就是两个电机,四根线,其他四根线一根复位按钮,两根GND一根5V充电。这不就简单了。
于是设计了一个简单的将动力增强的电路:
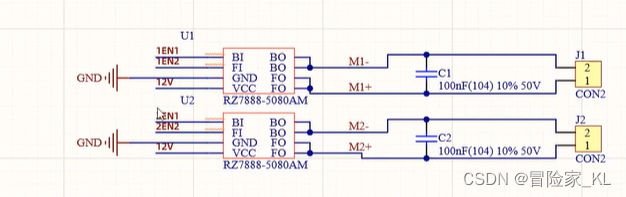
电机正转时候EN1为+ EN2为-,反之也是如此,刚好符合RZ7888芯片的控制逻辑,直接设计了一个小板子。

小车也就做成了。
晚上跑出去,在野地里跑也是别有一番滋味。



问题
不过经过测试发现,车子并不能发挥最大的速度跑,最后发现是因为EBO的电机驱动信号PWM调速后,幅值偏低,并不能完全驱动RZ7888芯片,于是乎有了第二代的想法。
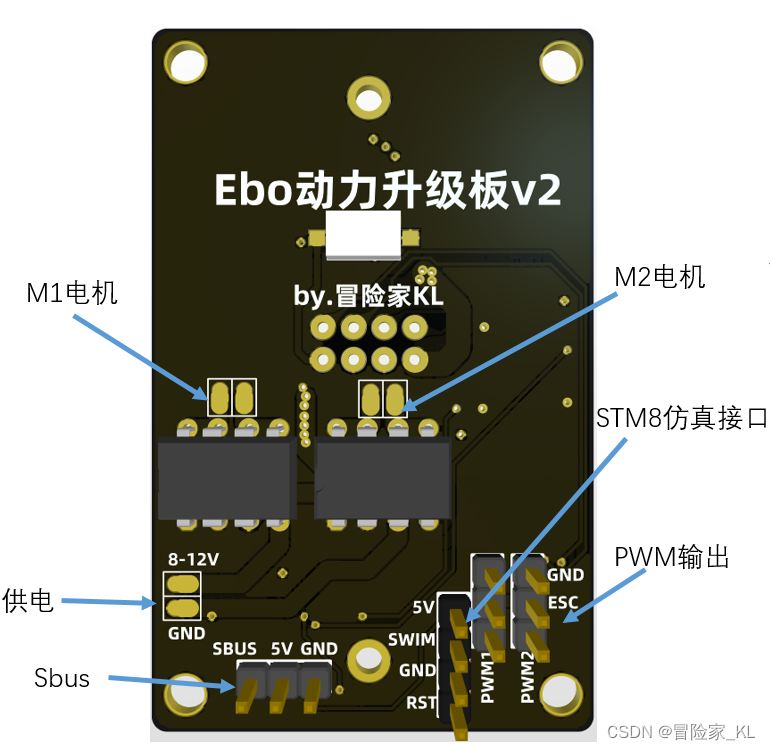
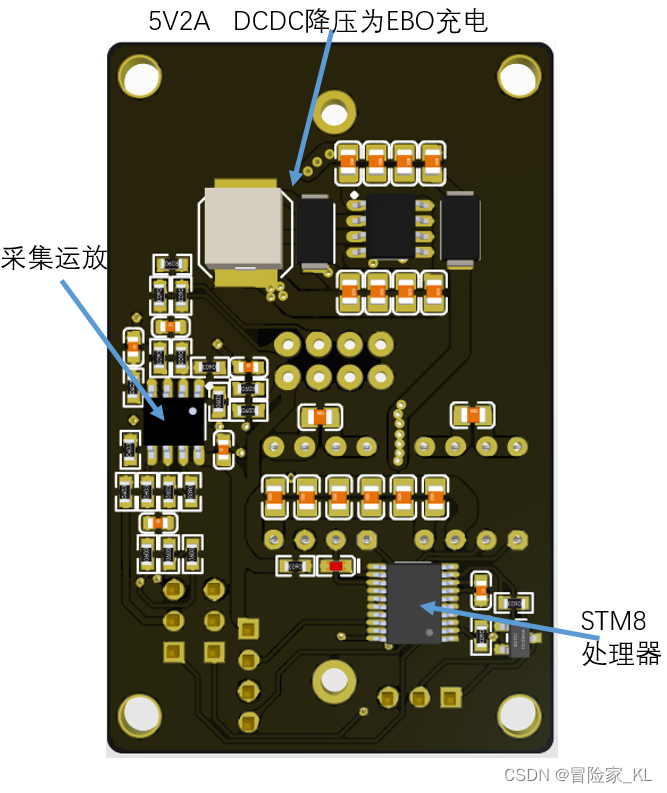
第二版
供电电压:6-14V
电机驱动最大电流:7A
输出接口:SBUS,PWM,两路直流有刷电机差速驱动
注意:SBUS及PWM接口预留,但程序未写。只写了直流有刷电机差速驱动
电路及程序开源,有需要可以修改。
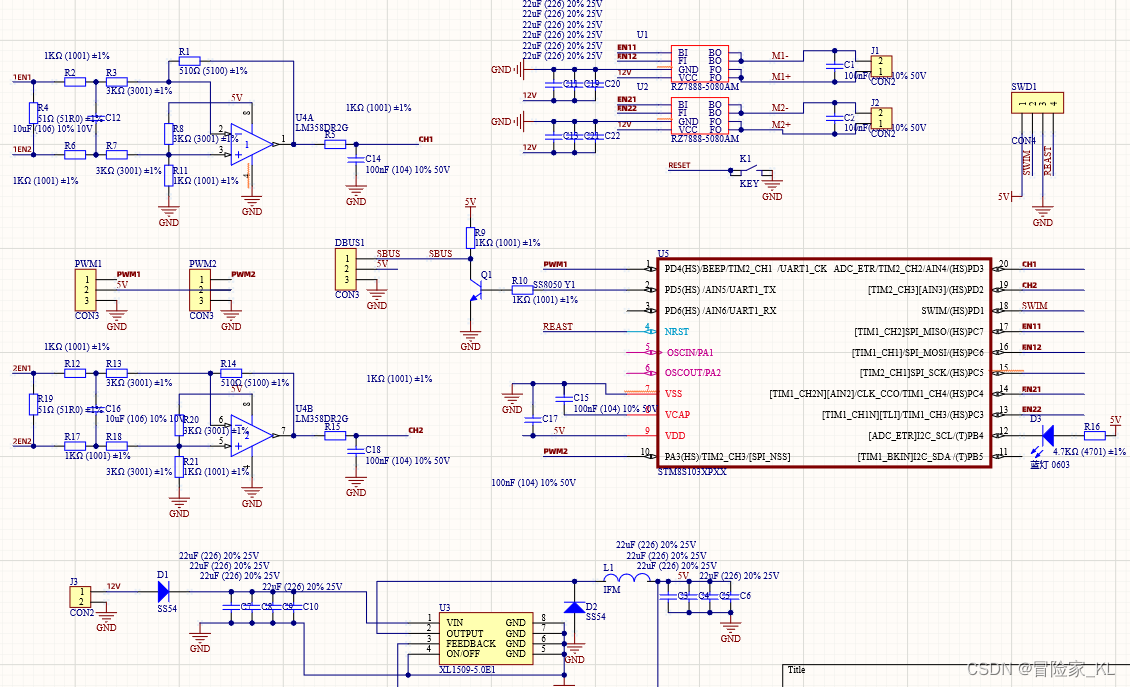
原理图
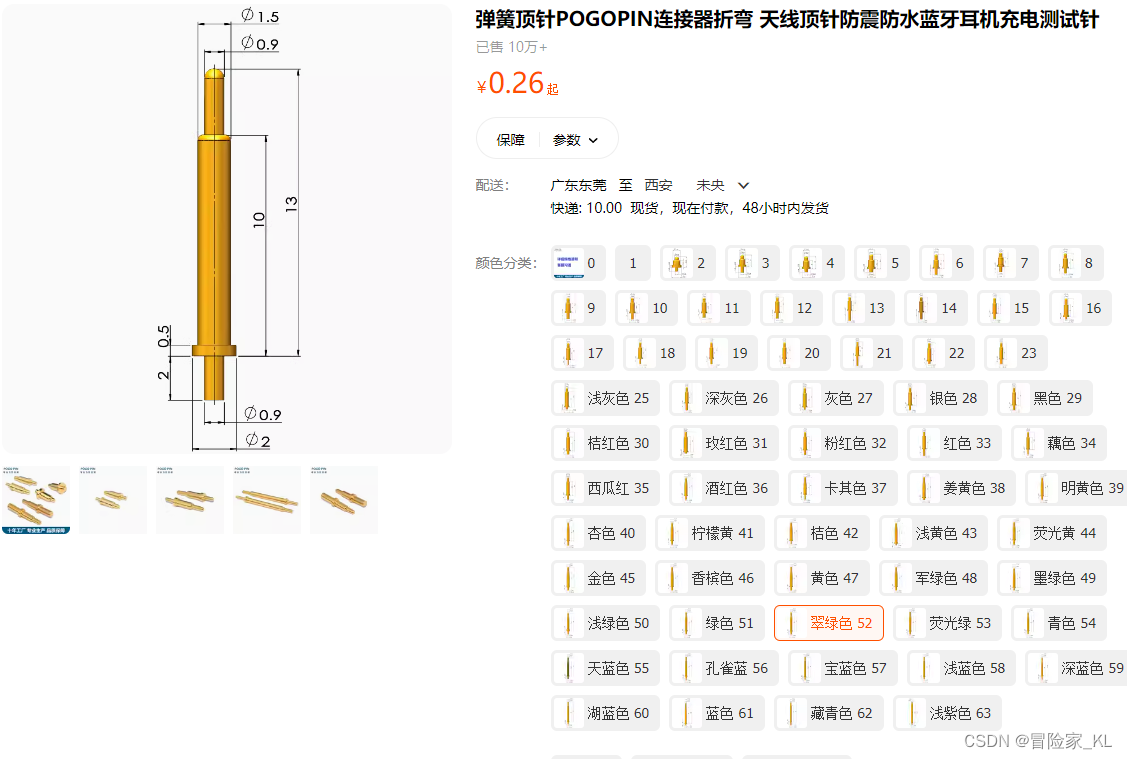
探针规格尺寸:
第二版直接通过运放监测电机驱动信号,单片机监测其输出电压,最后解析到数据,然后单片机直驱电机驱动,动力会更强,而且解析到数据后可以通过PWM输出SBUS输出,等扩展能力更强。
二代介绍请看视频:https://www.bilibili.com/video/BV1TN4y1q7QA/
代码电路全开源。
3D打印支架 :https://oshwhub.com/attachments/2024/1/E43kTudUCFkb50MbsMTt2eS3Pgmfi9sMGz8EKlvP.zip?operation=download
EBO底板电路:https://oshwhub.com/attachments/2024/1/w35qG1KRd6WJvBZeCbrEYplxhwrRaiq1rYm8hOeL.zip?operation=download
EBO程序:
https://oshwhub.com/attachments/2024/1/xgoyi1aphC9GEtSadVIxwAAQtRGP2TkIAtd7q3PR.zip?operation=download


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









