






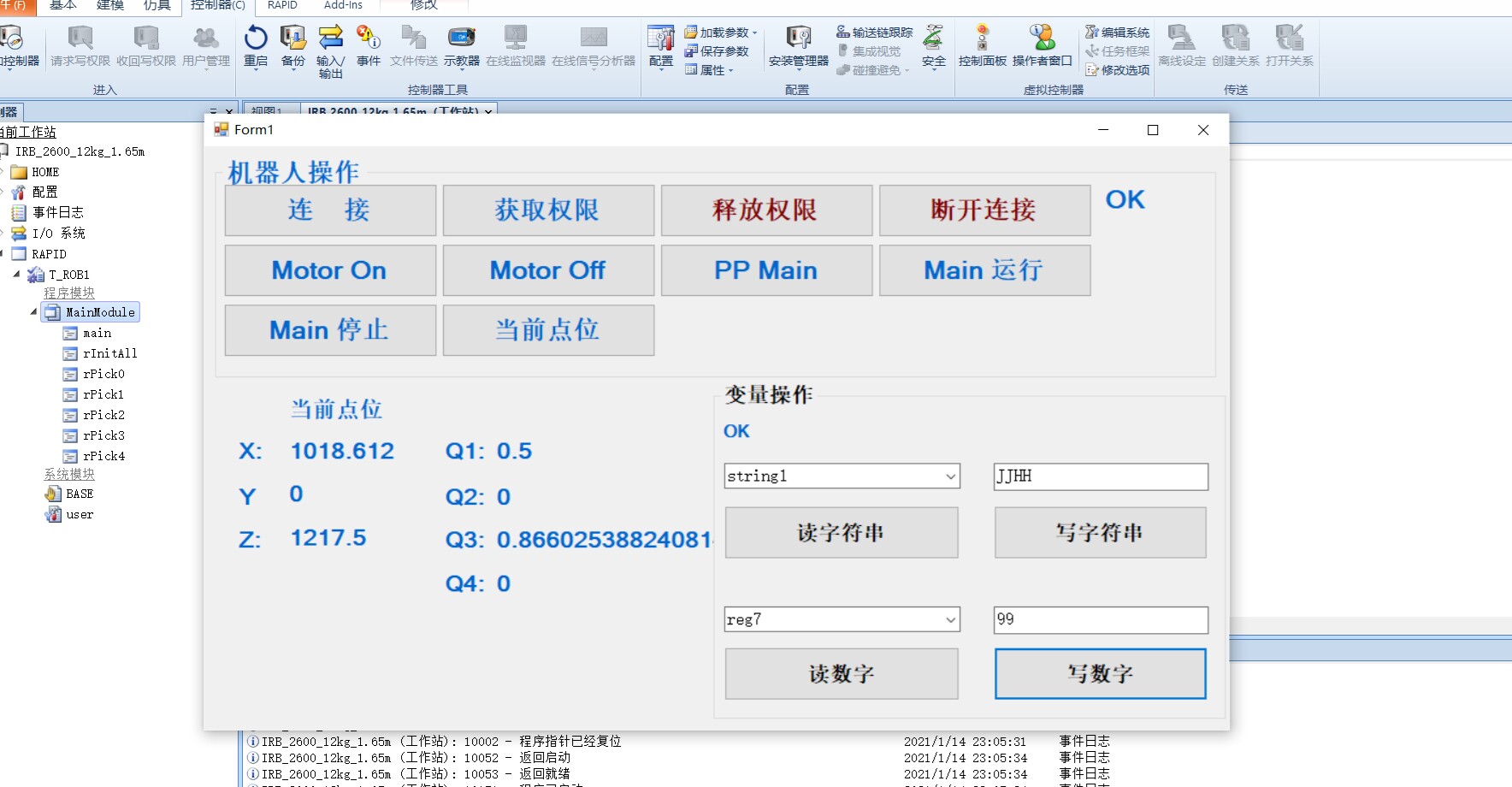
ABB机器人二次开发 C#读取和写入数据,可以获取点位信息及写入点位信息。
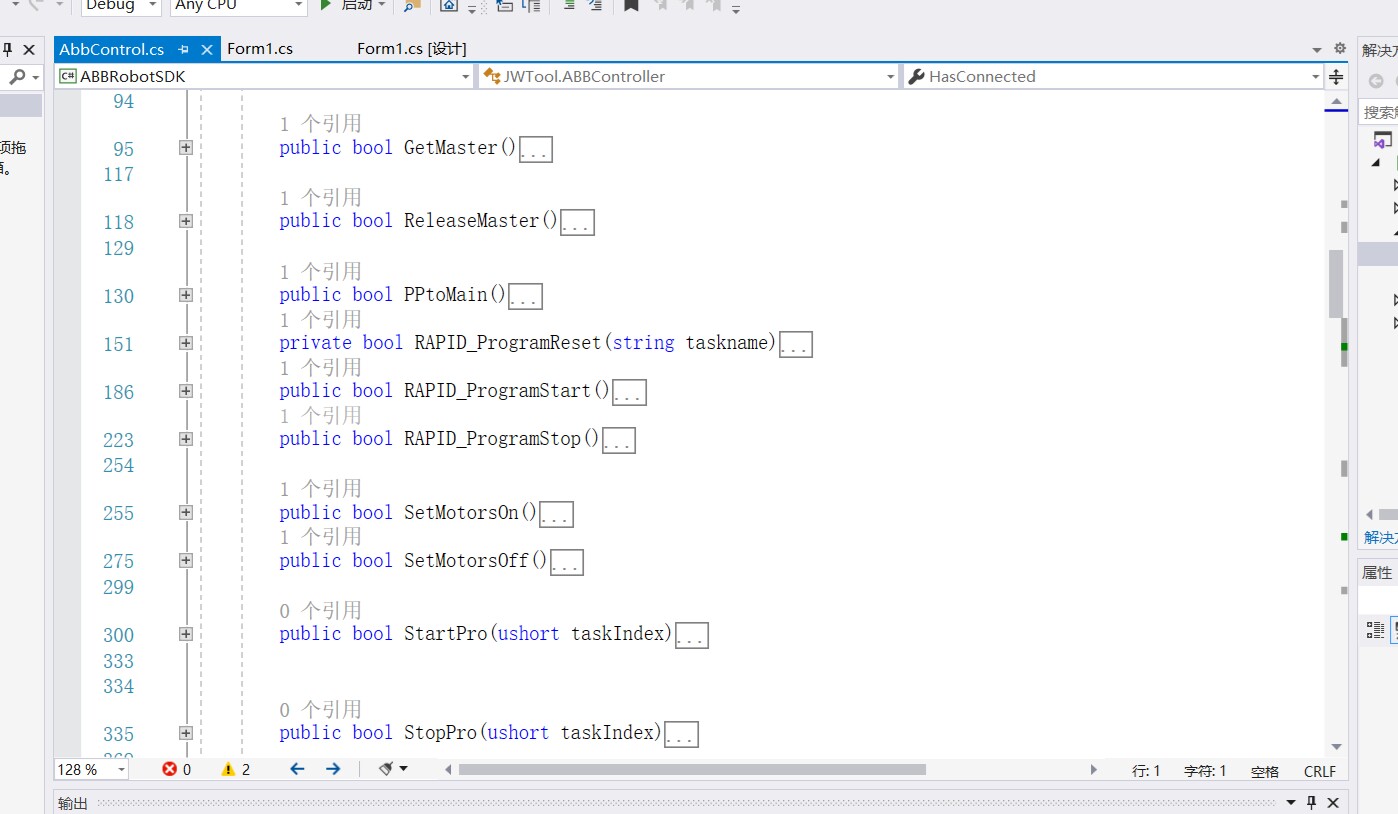
自己写的ABB机器人类,机器人常规操作功能都有,非常适合进行二次开发。
YID:3717635959328320
最后一只烤鸭
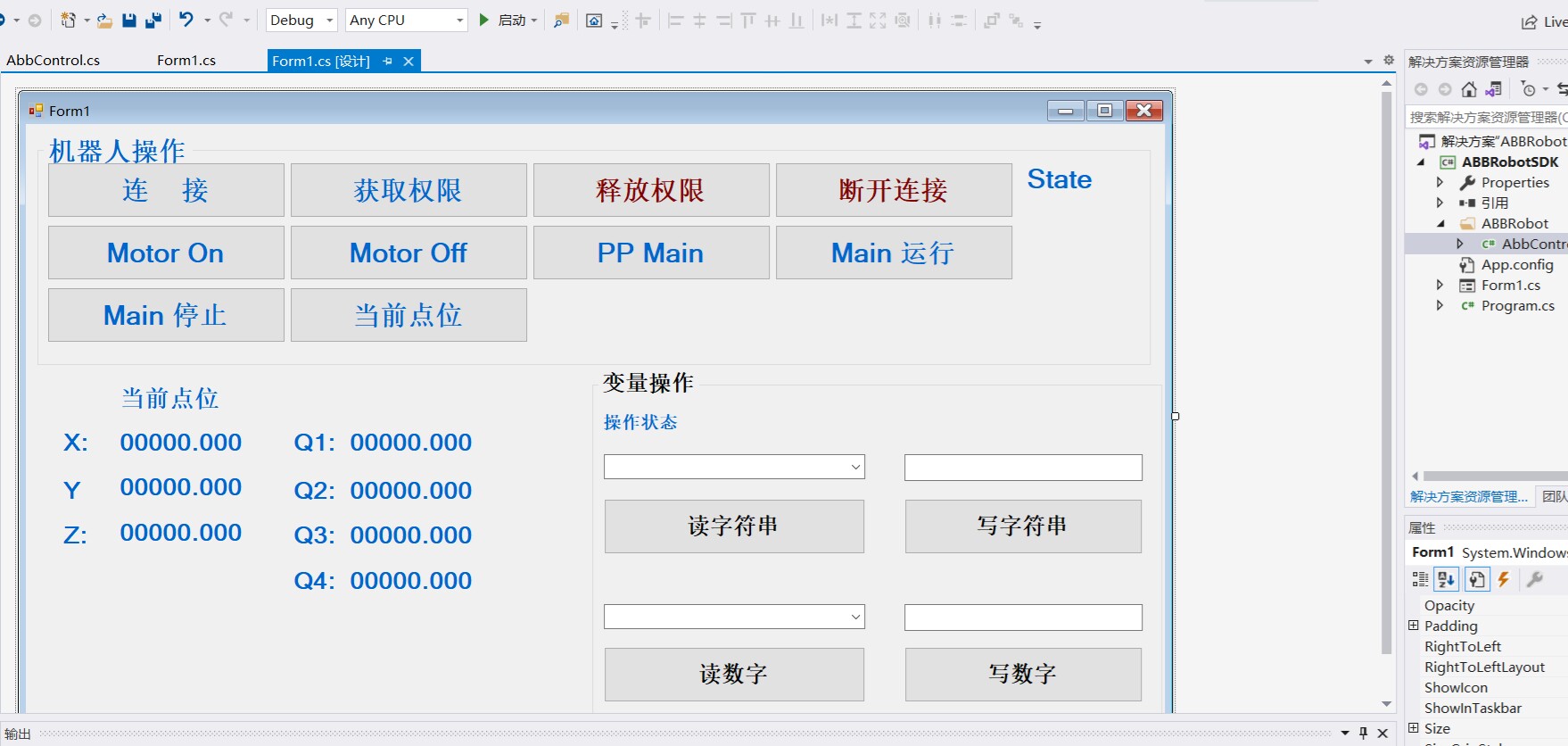
ABB机器人二次开发是指在ABB机器人原有功能的基础上,通过使用C#编程语言实现对机器人的数据读取和写入操作。这样的二次开发可以让用户更加灵活地控制机器人,以满足不同的应用需求。
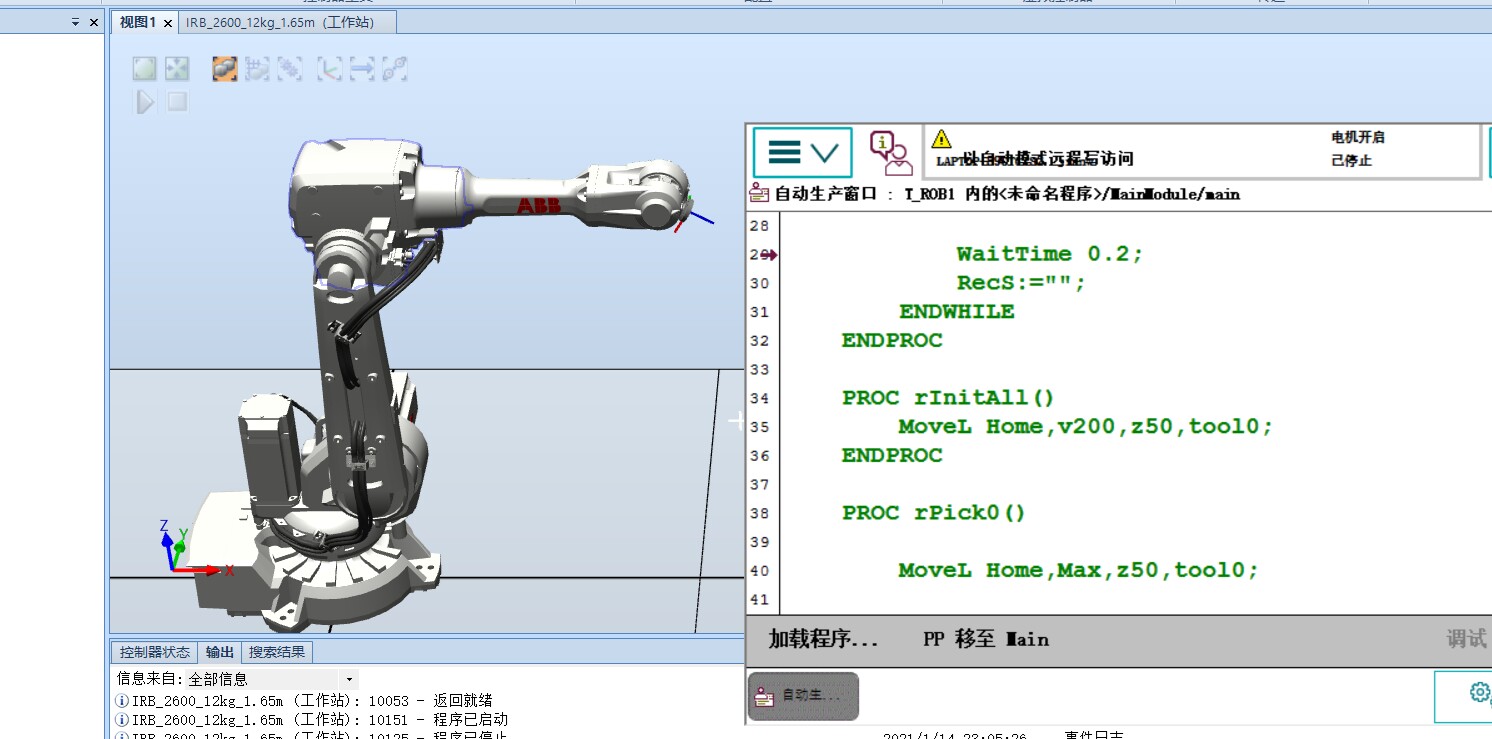
在ABB机器人二次开发中,C#是一种常用的编程语言。通过使用C#编写ABB机器人类,我们可以方便地读取和写入机器人的点位信息。点位信息是机器人在三维空间中的位置和姿态信息。通过读取点位信息,我们可以获取机器人当前的位置和姿态状态。而通过写入点位信息,我们可以控制机器人的运动,使其达到指定的位置和姿态。
ABB机器人类是一种封装了机器人常规操作功能的类。它包括了机器人的基本操作,如启动和关闭机器人、设置机器人运动速度、设置机器人路径等。对于二次开发来说,ABB机器人类为我们提供了一个基础框架,我们可以在此基础上进行进一步的开发。
通过ABB机器人二次开发,我们可以实现很多有趣的功能。例如,我们可以通过读取机器人的点位信息,实现机器人的自动定位功能。当我们需要将机器人移动到某个特定位置时,我们只需将目标位置的点位信息写入机器人,然后机器人就会自动移动到该位置。这样的功能可以大大简化机器人的操作流程,提高工作效率。
另外,通过ABB机器人二次开发,我们还可以实现机器人的路径规划功能。路径规划是指在机器人运动过程中,找到一条最优的路径,使得机器人能够在最短的时间内到达目标位置。通过读取机器人的点位信息和路径信息,我们可以使用一些优化算法来实现路径规划。这样的功能可以使机器人的运动更加灵活和高效。
总结来说,ABB机器人二次开发是一种基于C#编程语言的开发方式,通过读取和写入机器人的点位信息,实现对机器人的灵活控制。通过开发自己的ABB机器人类,我们可以方便地进行二次开发,并实现各种有趣的功能,如自动定位和路径规划。这样的二次开发不仅可以提升机器人的使用效果,还能够满足不同应用场景下对机器人的需求。
【相关代码,程序地址】:http://lanzoup.cn/635959328320.html















 902
902











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









