






 本文介绍了如何使用C#.net开发ABB机器人的上位机程序,包括动作控制、数据读取、写入以及运行数据记录,强调了二次开发的可能性,为工业自动化提供了实用的解决方案。
本文介绍了如何使用C#.net开发ABB机器人的上位机程序,包括动作控制、数据读取、写入以及运行数据记录,强调了二次开发的可能性,为工业自动化提供了实用的解决方案。
C#.net开发ABB机器人上位机操作机器人动作及读写数据
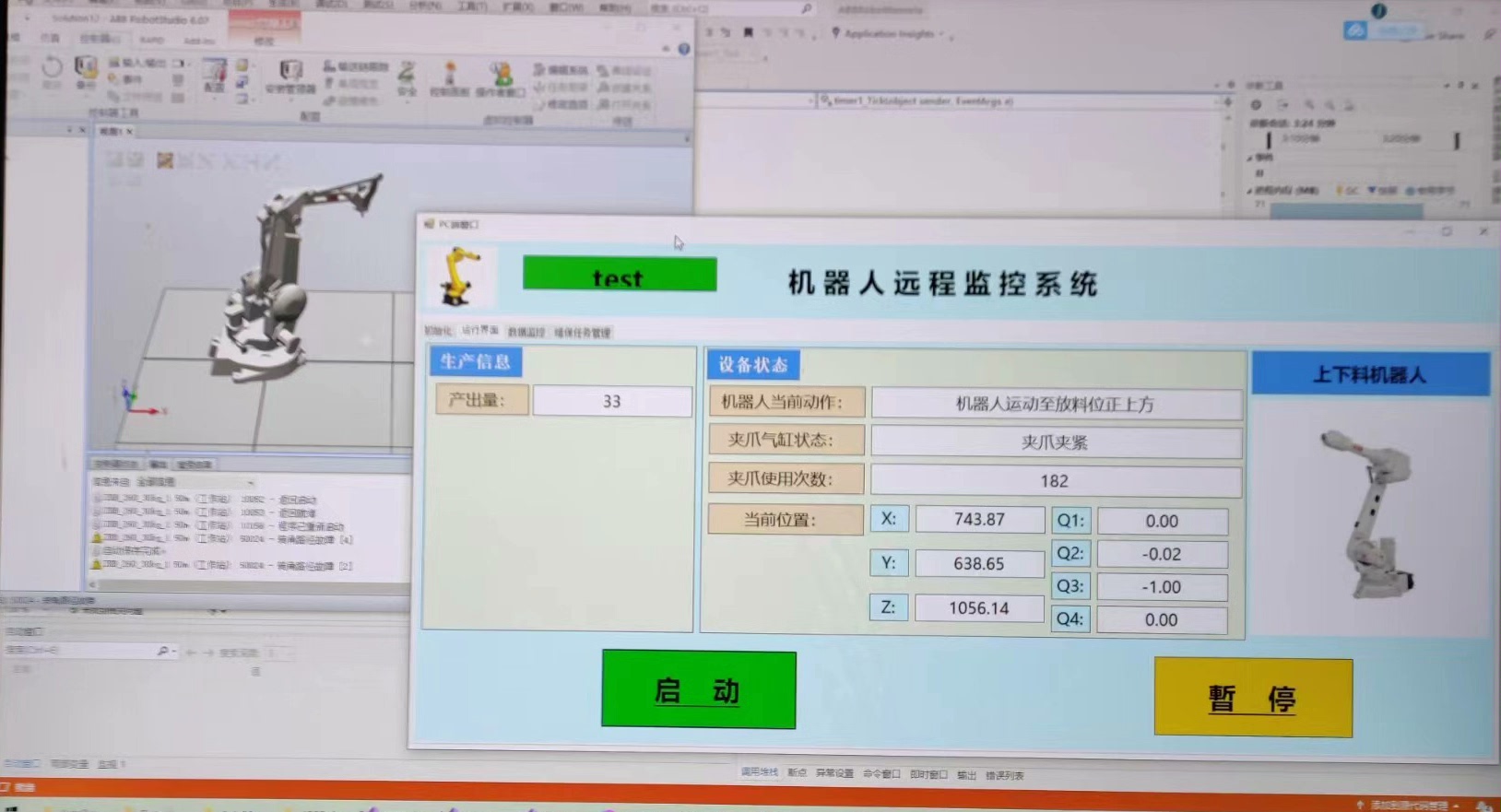
ABB机器人操作类,程序包含运行数据记录,设备报警信息显示,
项目比较完整,适合自己做二次开发。
ID:2250728003101704
自由苏风

C#.net开发ABB机器人上位机操作机器人动作及读写数据
近年来,随着工业自动化的快速发展,ABB机器人作为工业机器人领域的翘楚,已经广泛应用于各个行业中。而在ABB机器人的开发中,C#.net成为了一种常见的开发语言。本文将围绕C#.net开发ABB机器人上位机操作机器人动作及读写数据展开讨论,介绍ABB机器人操作类的程序设计思路,以及如何进行二次开发。
首先,我们需要了解ABB机器人操作类的设计特点。在实际的工程项目中,ABB机器人往往需要实现运行数据的记录和设备报警信息的显示。对于这些需求,我们可以通过C#.net开发的上位机程序来实现。在ABB机器人操作类的设计中,我们可以将其分为三个模块:机器人动作控制模块、数据读取模块和数据写入模块。
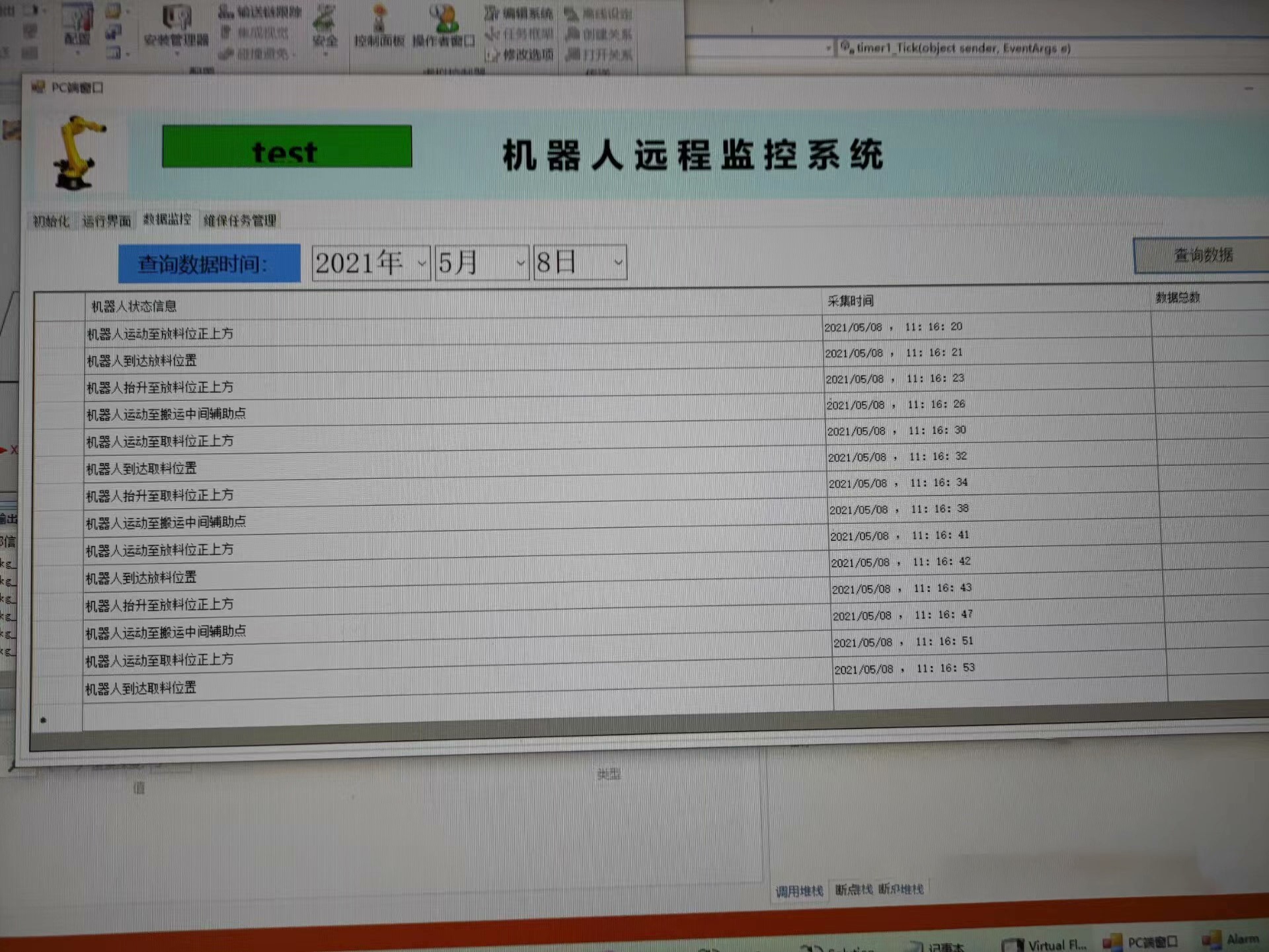
机器人动作控制模块是ABB机器人操作类中最核心的部分。通过C#.net开发的上位机程序,我们可以通过调用ABB机器人提供的API,实现对机器人动作的控制。通过这个模块,我们可以实现机器人的运动控制、任务调度等功能。同时,我们还可以通过在程序中添加运行数据记录的功能,来实现对机器人运行数据的记录和分析。这样,我们就可以及时了解机器人的运行状态,为后续的优化和调整提供依据。
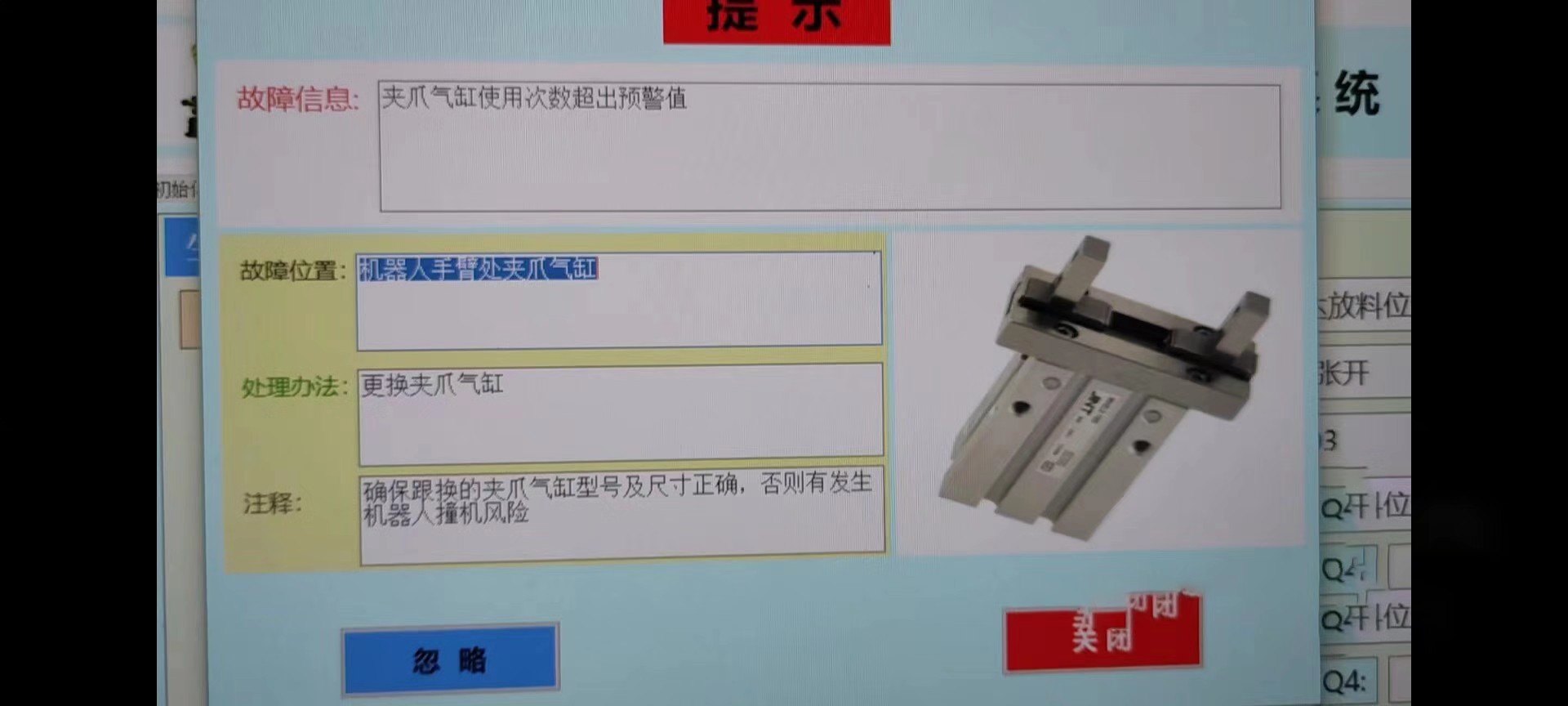
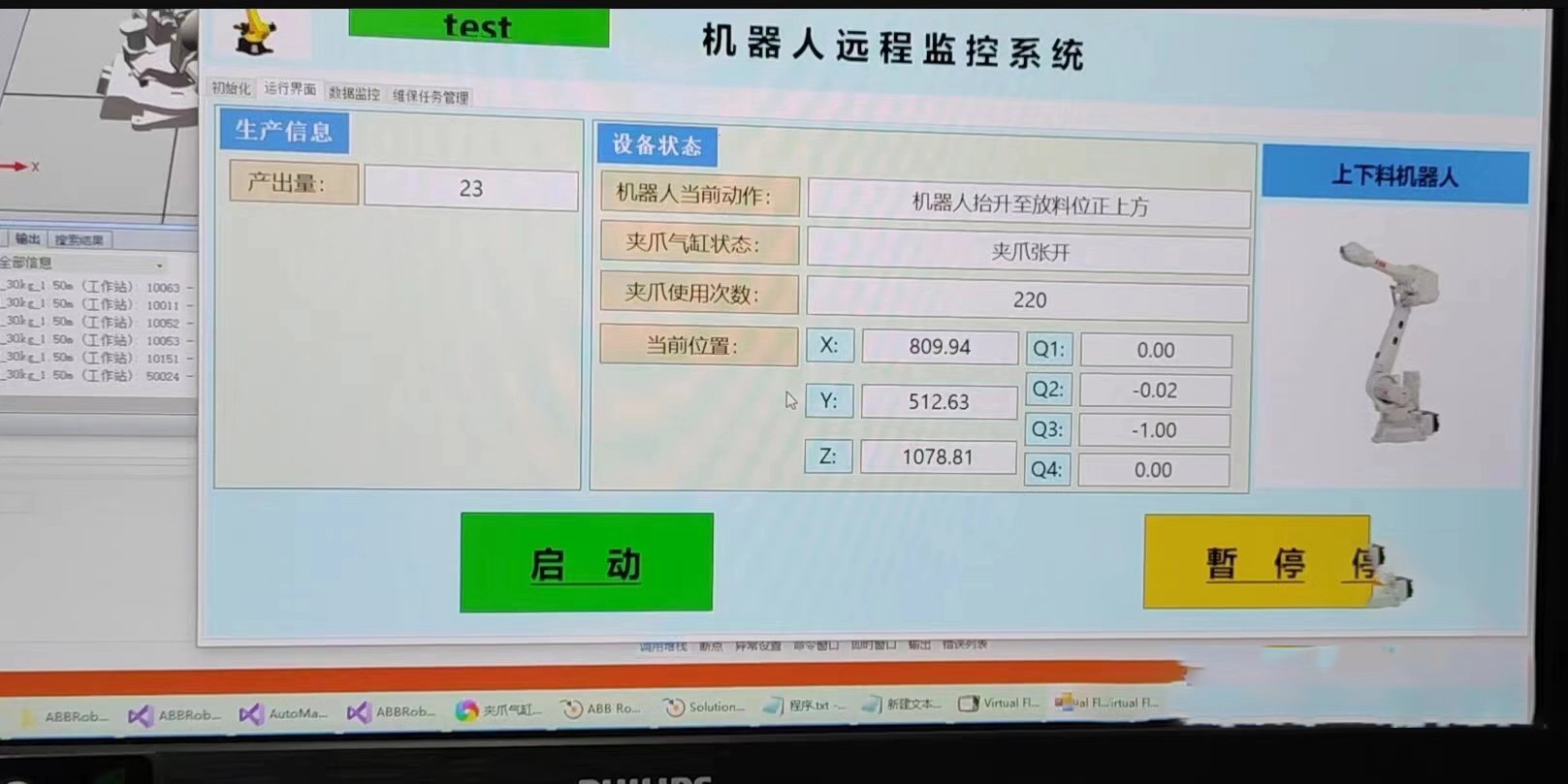
数据读取模块可以实现对ABB机器人上的数据进行获取和解析。通过C#.net开发的上位机程序,我们可以通过调用ABB机器人提供的API,来获取机器人各个关键数据,如位置、姿态、力矩等。同时,我们还可以通过对这些数据进行解析,得到更加详细和准确的信息。对于设备报警信息的显示,我们可以通过实时获取机器人的报警信息,并将其显示在上位机界面上,方便操作人员及时处理。
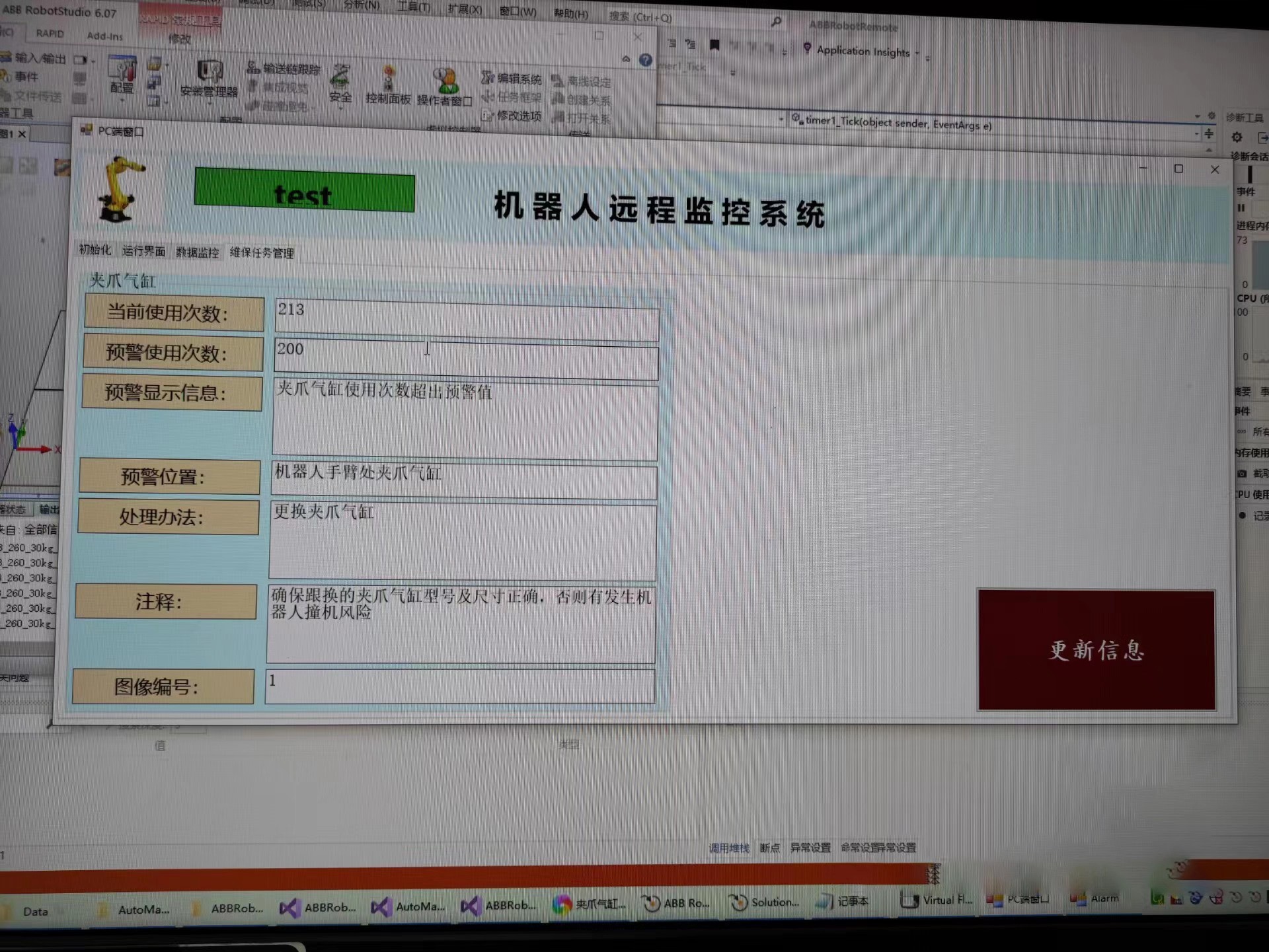
数据写入模块可以实现对ABB机器人上的数据进行修改和更新。通过C#.net开发的上位机程序,我们可以通过调用ABB机器人提供的API,来修改机器人的参数和配置。这样,我们就可以通过上位机程序对机器人进行故障排查和调整,提高机器人的运行效率和稳定性。
在进行二次开发时,我们可以根据具体项目需求对ABB机器人操作类进行扩展和优化。例如,根据实际情况增加新的功能模块、界面设计和数据处理算法等。同时,我们还可以根据具体项目需求对机器人的动作控制进行优化,提高机器人的运动精度和速度,为工业生产提供更加高效和可靠的解决方案。
总的来说,C#.net开发ABB机器人上位机操作机器人动作及读写数据是一项具有重要意义和广泛应用的技术。通过C#.net开发的上位机程序,我们可以实现对ABB机器人的全面控制和管理,提高机器人的运行效率和稳定性。在二次开发中,我们可以根据具体项目需求对ABB机器人操作类进行扩展和优化,提供适应不同工业场景的解决方案。
希望本文能够对C#.net开发ABB机器人上位机操作机器人动作及读写数据有所启发,并为读者在工业自动化领域的开发工作提供参考。相信通过不断的学习和实践,我们能够更好地发挥C#.net的优势,为ABB机器人的应用和开发贡献力量。
以上相关代码,程序地址:http://wekup.cn/728003101704.html















 641
641











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









