







文章来自一口linux博客,这里主要拿来做笔记使用,记录自己的学习心得(11. 基于ARM Cortex-A9中断详解_cortex a9中断-CSDN博客)
一、中断概念
操作系统中,中断是很重要的组成部分。出现某些意外情况需主机干预时,机器能自动停止正在运行的程序并转入处理新情况的程序,处理完毕后又返回原被暂停的程序继续运行。
有了中断系统才可以不用一直轮询(polling)是否有事件发生,系统效率才得以提高。
一般在系统中,中断控制分为三个部分:「模块、中断控制器和处理器」。
模块的中断信号通常复用GPIO引脚,可由GPIO控制器控制是否使能中断和中断触发条件等;
中断控制器可以管理中断的优先级、分派给指定CPU等功能;
处理器则由寄存器设置用来响应和处理中断。
二、GIC中断控制器
ARM 系统中通用中断控制器的是 GIC(Generic Interrupt Controller),目前有四个版本,V1~V4(V2最多支持8个ARM core,V3/V4支持更多的ARM core,主要用于ARM64系统结构)。
【注意】对于一些老的ARM处理器,比如ARM11,Cortex-A8,中断控制器一般是VIC(向量中断控制器)。
2.1. GIC-400
下面以GIC-400为例,它更适合嵌入式系统,符合v2版本的GIC architecture specification。GIC-400通过AMBA(Advanced Microcontroller Bus Architecture)片上总线连接到一个或者多个ARM处理器上。
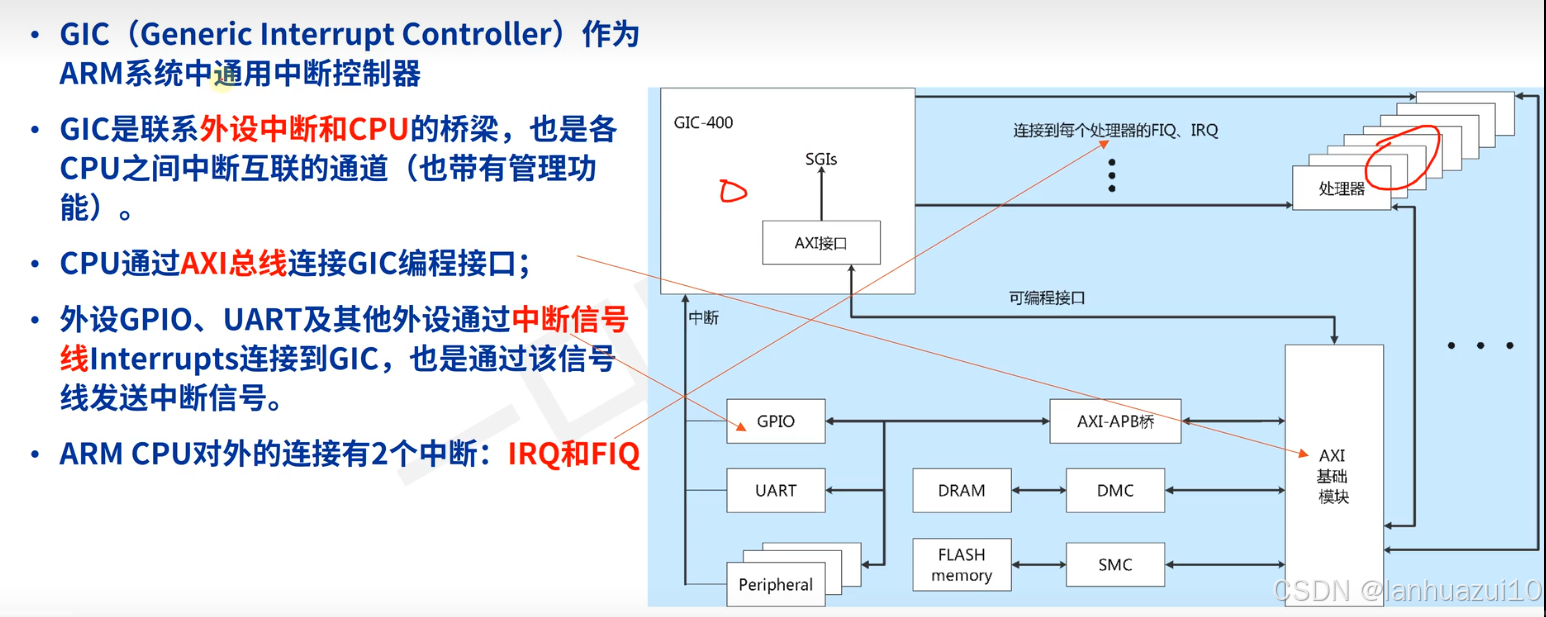
GIC中断控制器全局图
从上图可以看出,GIC 是联系外设中断和 CPU 的桥梁。也是各 CPU 之间中断互联的通道(也带有管理功能),它负责检测、管理、分发中断,因此GIC有如下功能:
-
使能或禁止中断;
-
把中断分组到Group0还是Group1(Group0作为安全模式使用连接FIQ ,Group1 作为非安全模式使用,连接IRQ );
-
多核系统中将中断分配到不同处理器上;
-
设置电平触发还是边沿触发方式(不等于外设的触发方式);
-
虚拟化扩展。
ARM CPU 对外的连接只有2 个中断:「IRQ和FIQ」 ,相对应的处理模式分别是一般中断(IRQ )处理模式和快速中断(FIQ )处理模式。所以GIC 最后要把中断汇集成2 条线,与CPU 对接,每个CPU有两根线,分别连接FIQ和IRQ,CPU响应中断流程就是上面的4大步3小步。
2.2. GIC内部模块
GIC内部包含两个最重要模块。分发器(Distributor)和CPU接口(CPU interface)
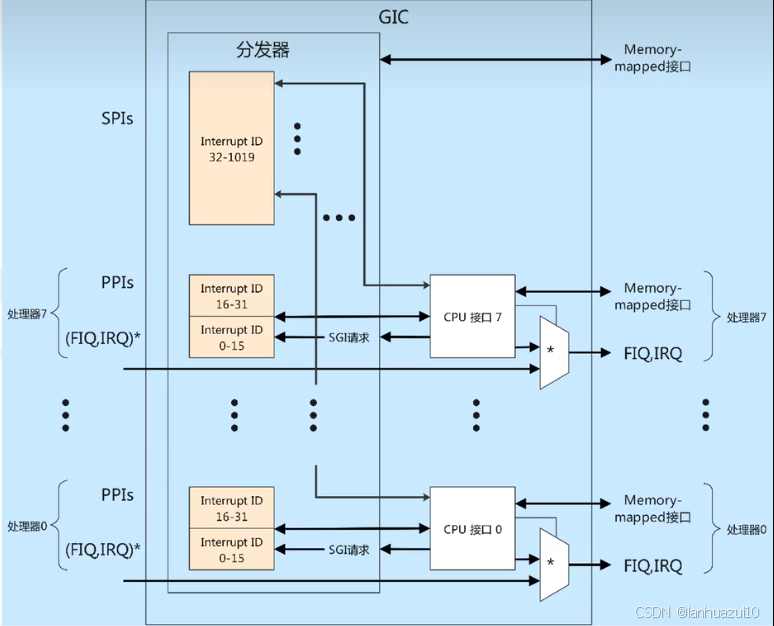
GIC中断控制器结构
分发器功能:负责各个子中断使能,设置触发方式,优先级排序,分发到哪个 CPU 上,管理若干个中断源(interruptID);
CPU接口:负责总的中断的使能,状态的维护。
2.2.1 分发器功能
分发器的主要的作用是检测各个中断源的状态,控制各个中断源的行为,分发各个中断源产生的中断事件到指定的一个或者多个CPU接口上。虽然分发器可以管理多个中断源,但是它总是把优先级最高的那个中断请求送往CPU接口。
分发器对中断的控制包括:
(a)中断使能或禁能控制。分发器对中断的控制分成两个级别,一个是全局中断的控制(GIC_DIST_CTRL),一旦禁止了全局的中断,那么任何的中断源产生的中断事件都不会被传递到CPU接口;另外一个级别是对针对各个中断源进行控制(GIC_DIST_ENABLE_CLEAR),禁止某一个中断源会导致该中断事件不会分发到CPU接口,但不影响其他中断源产生中断事件的分发。
(b)控制将当前优先级最高的中断事件分发到一个或者一组CPU接口。
(c)优先级控制。
(d)中断属性设定,例如是电平触发还是边沿触发。
(e)中断的设定。
分发器可以管理若干个中断源,这些中断源用ID来标识,我们称之interrupt ID。
2.2.2 CPU接口功能
CPU接口主要用于和CPU进行接口。
主要功能包括:
-
(a)使能或者禁止CPU接口向连接的CPU提交中断事件。对于ARM,CPU接口和CPU之间的中断信号线是nIRQCPU和nFIQCPU。如果禁止了中断,那么即便是分发器分发了一个中断事件到CPU接口,但是也不会提交指定的nIRQ或者nFIQ通知CPU。
-
(b)应答中断。CPU会向CPU接口应答中断,中断一旦被应答,分发器就会把该中断的状态从pending状态修改成active,如果没有后续pending的中断,那么CPU 接口就会deassert nIRQCPU和nFIQCPU信号线。如果在这个过程中又产生了新的中断,那么分发器就会把该中断的状态从pending状态修改成pending and active。此时,CPU接口仍然会保持nIRQ或者nFIQ信号的asserted状态,也就是向CPU通知下一个中断。
-
(c)中断处理完毕的通知。当中断处理器处理完了一个中断的时候,会向写CPU 接口的寄存器从而通知GIC已经处理完该中断。做这个动作一方面是通知分发器将中断状态修改为deactive,另外一方面,可以允许其他的pending的中断向CPU接口提交。
-
(d)设定优先级掩码。通过优先级掩码可以mask掉一些优先级比较低的中断,这些中断不会通知到CPU。
-
(e)设定中断抢占的策略。
-
(f)在多个中断事件同时到来的时候,选择一个优先级最高的通知CPU。
CPU接口:中断状态维护
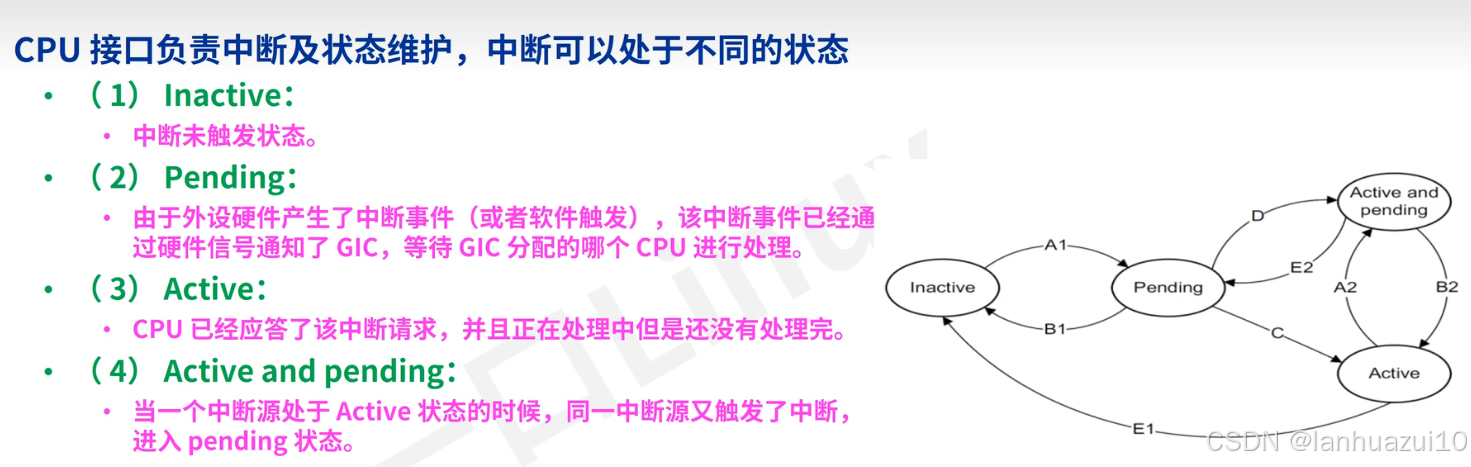
inactive: 中断未触发状态
pending: 中断已触发了,但是CPU未响应
active: cpu已经响应了中断,中断正在处理中但是还没有处理完
2.3 key中断管理模块
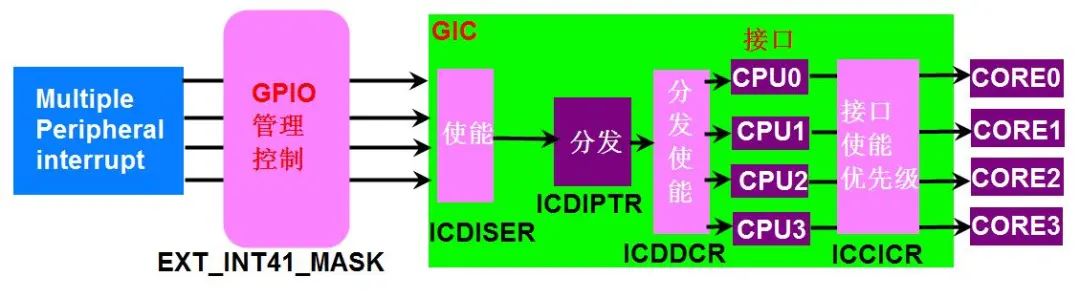
以上图为例,该图是按键产生的中断信号要到达cpu所要经过的路径。
-
外设中断源有很多,通常芯片厂商会设计若干个第一级中断控制器,进行第一次处理,key连接的是GPX1中断控制器,寄存器EXT_INT41_MASK用于使能该中断;
-
GIC主要包括分排气和cpu interface;
-
ICDISER用于使能分派器,ICDIPTR用于将中断信号分发给对应的cpu interface;
-
ICCICR用于使能CPU interface;
-
CPU上有两个引脚irq、fiq,gic最终会连接到CPU的irq,所有寄存器配置完毕后,按键一旦按下,那么就会给CPU的irq发送一个中断信号,cpu紧接着就会执行“4大步3小步”,进入中断异常处理流程。
三、中断分类
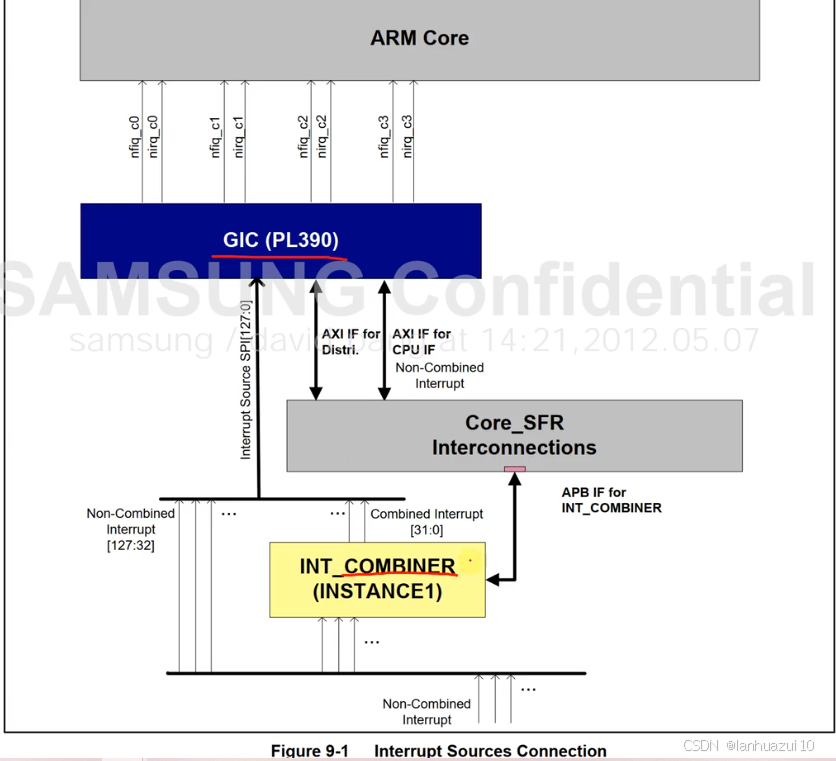
中断源与GIC连接如上图所示,分为两条线路,combined interrupt和Non-combined interrupt。
所有 的中断源厂家都固定好了,每个中断源都有一个hardware id, [31:0]先经过combiner, [127:32]直连GIC。hardware id与中断源是一一映射的关系的,中断号不一定是固定死的。
Core_SFR表示特殊功能寄存器,用于链接中断源与GIC。
GIC中断源定义如下: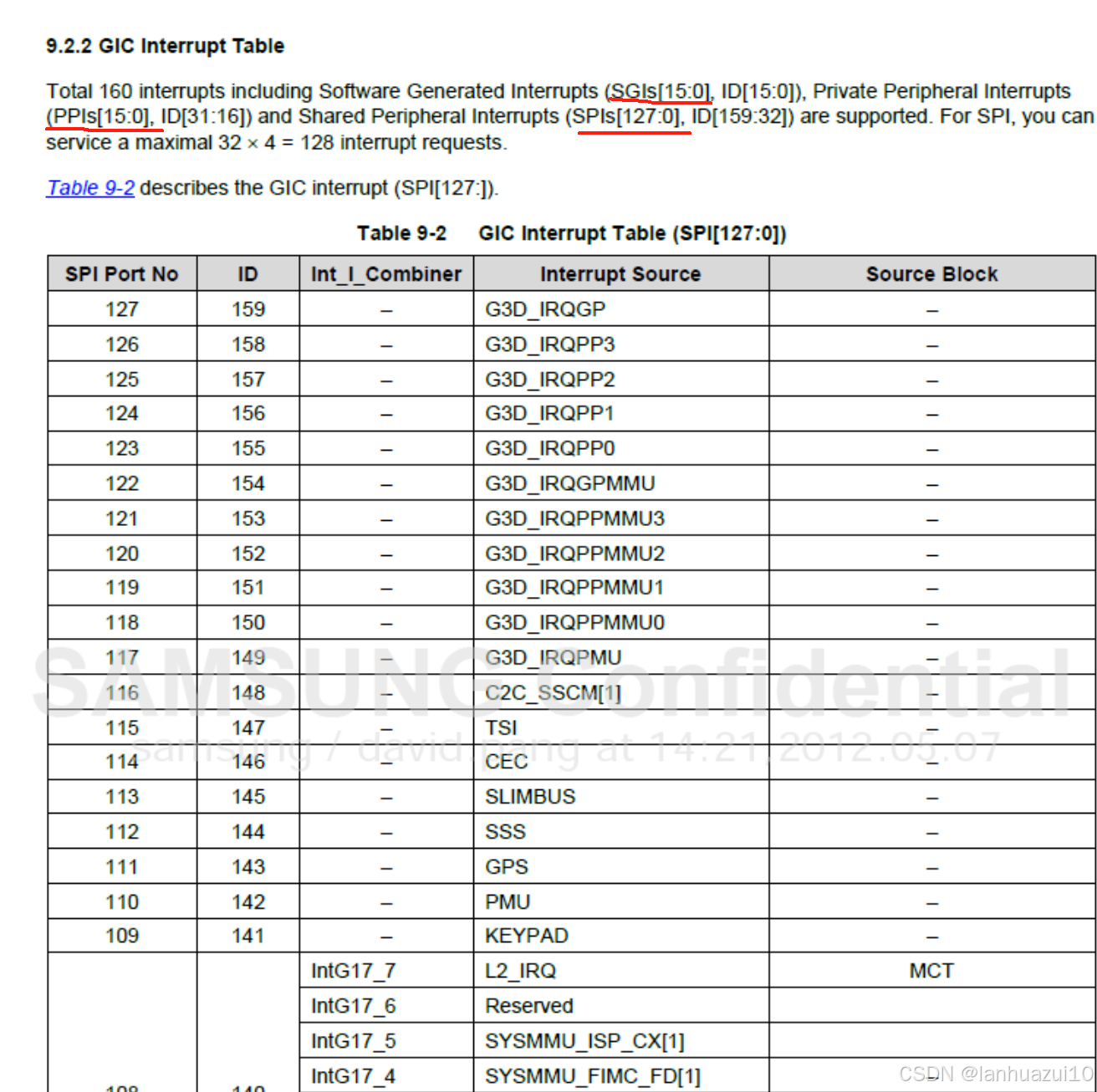
exynos4412共支持160个中断源
SGI: [15:0]
PPI :[31:16]
SPI: [159:32]
3.1. 中断源
硬件中断(Hardware Interrupt)
-
可屏蔽中断(maskable interrupt)。硬件中断的一类,可通过在中断屏蔽寄存器中设定位掩码来关闭。
-
非可屏蔽中断(non-maskable interrupt,NMI)。硬件中断的一类,无法通过在中断屏蔽寄存器中设定位掩码来关闭。典型例子是时钟中断(一个硬件时钟以恒定频率—如50Hz—发出的中断)。
-
处理器间中断(interprocessor interrupt)。一种特殊的硬件中断。由处理器发出,被其它处理器接收。仅见于多处理器系统,以便于处理器间通信或同步。
-
伪中断(spurious interrupt)。一类不希望被产生的硬件中断。发生的原因有很多种,如中断线路上电气信号异常,或是中断请求设备本身有问题。
软件中断(Software Interrupt)
软件中断SWI,是一条CPU指令,用以自陷一个中断。由于软中断指令通常要运行一个切换CPU至内核态的子例程,它常被用作实现系统调用(System call)。
外部中断
-
I/O设备:如显示器、键盘、打印机、A / D转换器等。
-
数据通道:软盘、硬盘、光盘等。数据通道中断也称直接存储器存取(DMA)操作中断,如磁盘、磁带机或CRT等直接与存储器交换数据所要求的中断。
-
实时时钟:如外部的定时电路等。在控制中遇到定时检测和控制,为此常采用一个外部时钟电路(可编程)控制其时间间隔。需要定时时,CPU发出命令使时钟电路开始工作,一旦到达规定时间,时钟电路发出中断请求,由CPU转去完成检测和控制工作。
-
用户故障源:如掉电、奇偶校验错误、外部设备故障等。
产生于CPU内部的中断源
-
由CPU得运行结果产生:如除数为0、结果溢出、断点中断、单步中断、存储器读出出错等。
-
执行中断指令swi
-
非法操作或指令引起异常处理。
3.2. 中断类型
GIC 中断类型有3种:SGI(Software-generated interrupt)、PPI(Private peripheral interrupt )、SPI(Shared peripheral interrupt)。
-
SGI: SGI为软件可以触发的中断,统一编号为0~15(ID0-ID7是不安全中断,ID8-ID15是安全中断),用于各个core之间的通信。该类中断通过相关联的中断号和产生该中断的处理器的CPUID来标识。通常为边沿触发。
-
PPI: PPI为每个 core 的私有外设中断,统一编号为 16-31 。例如每个 CPU 的 local timer 即 Arch Timer 产生的中断就是通过 PPI 发送给 CPU 的(安全为29,非安全为30)。通常为边沿触发和电平触发。
- SPI: SPI 是系统的外设产生的中断,为各个 core 公用的中断,统一编号为 32~1019 ,如 global timer 、uart 、gpio 产生的中断。通常为边沿触发和电平触发。
Note:电平触发是在高或低电平保持的时间内触发, 而边沿触发是由高到低或由低到高这一瞬间触发;在GIC中PPI和SGI类型的中断可以有相同的中断ID。
3.3. 中断分派模式
-
1-N mode (SPIs using the GIC 1-N model) 表示中断可以发给所有的CPU,但只能由一个CPU来处理中断;换句话说,这种类型的中断有N个目标CPU,但只能由其中一个来处理;当某一个处理器应答了该中断,便会清除在所有目标处理器上该中断的挂起状态。
-
N-N mode (PPIs and SGIs using the GIC N-N model) 表示中断可以发给所有CPU,每个CPU可以同时处理该中断。当该中断被某一个处理器应答了,这不会影响该中断在其他CPU接口上的状态。
举两个例子说明:
1)UART 接收到一包数据,产生了一个中断给GIC,GIC可以将该中断分配给CPU0-7中任何一个处理;假设该中断分配给CPU0处理了,那么在中断处理函数里面会把接收到的数据从UART FIFO读出。可以想象一下,如果CPU0在读数据时,另外一个CPU也在处理该中断,恰巧也在读数据,那么CPU0读到的数据是不全的。这就是1-N model中断,或者说SPI中断。
2)比如CPU0给CPU1-7发送中断,想告知对方自己正在处理某个进程A。这种场景下,CPU1-7都接收到中断,都进入中断处理函数,CPU1-7获取到CPU0的信息后,在进程调度时,就可以绕开进程A,而自己调度其他进程。
注:这个例子只是说明N-N model,实际上进程调度不都全是这样的。
3.4. 通用中断处理
中断处理流程见下图,分为4大步3小步
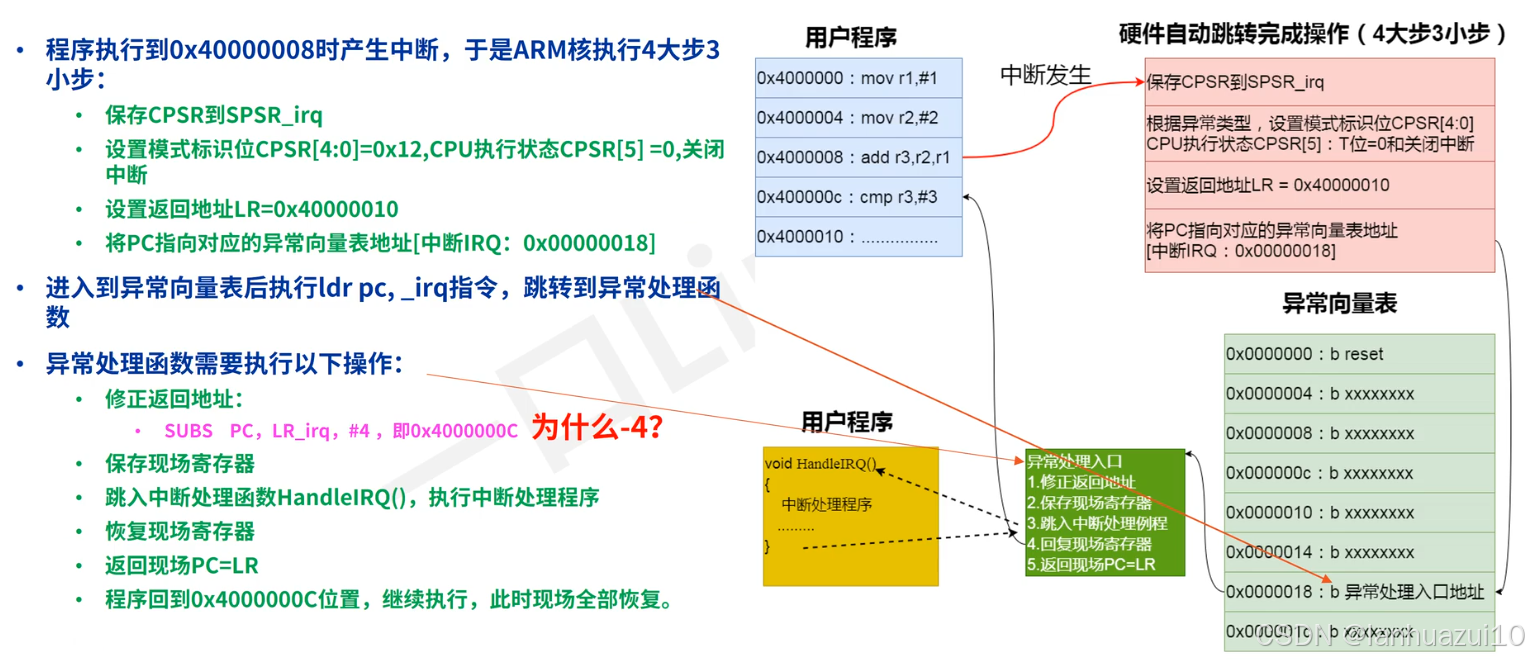
在0x40000008地址产生中断,由于ARM三级流水线的机制,保存到LR链接寄存器中的是当前指令的下下条指令地址,后续从LR返回地址的时候要修正地址。
注意上面的4大步是硬件自动完成的,会直接跳转到异常处理入口函数中执行。
异常处理函数主要执行左下角的步骤,修正返回地址是根据异常模式中的LR_irq计算出正确的pc值。保存现场寄存器是指保存R0-R8及CPSR这些环境变量。处理完中断函数后,恢复现场寄存器,及返回的PC值,然后就可以调到发生中断指令的下一条指令继续执行原来的流程。
当GIC接收到一个中断请求,将其状态设置为Pending。重新产生一个挂起状态的中断不影响该中断状态。
中断处理顺序:
① GIC决定该中断是否使能,若没有被使能对GIC没有影响;
② 对于每个Pending中断,GIC决定目标处理器;
③ 对于每个处理器 ,Distributor根据它拥有的每个中断优先级信息决定最高优先级的挂起中断,将该中断传递给目标CPU Interface;
④ GIC Distributor将一个中断传递给CPU Interface后,该CPU Interface决定该中断是否有足够的优先级将中断请求发给CPU;
⑤ 当CPU开始处理该异常中断,它读取GICC_IAR应答中断。读取的GICC_IAR获取到中断ID,对于SGI,还有源处理器ID。中断ID被用来查找正确的中断处理程序。
GIC识别读过程后,将改变该中断的状态:
a) 当中断状态变为active时,如果该中断挂起状态持续存在或者中断再次产生,中断状态将从Pending转化为pending & active
b) 否则,中断状态将从pending状态变为active
⑥ 当中断完成中断处理后,它需要通知GIC处理已经完成。这个过程称为 priority drop and interrupt deactivation:
a) 总是需要向EOIR寄存器写入一个有效的值(end of interrupt register) b) 也需要接着向GICC_DIR写入值(deactivate interrupt register)
3.5. 中断优先级
软件可以通过给每一个中断源分配优先级值来配置中断优先级。优先级的值是个8位的无符号二进制数,GIC支持最小16和最大256的优先级级别。
如果GIC实现的优先级少于256,那么优先级字段的低阶位为RAZ/WI。这就意味着实现的优先级字段个数范围是4~8,如下图所示:
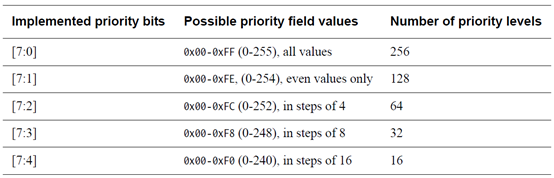
Effect of not implementing some priority field bits
Note:
1)、如何确定优先级字段所支持的优先级位?通过软件往可写GICD_IPRIORITYn优先级字段写入0XFF,然后回读出该字段的值便可以确定优先级字段所支持的优先级位(因为有些位没实现是RAZ/WI)
2)、ARM 推荐在检查中断优先级范围之前先:• 对于外设中断,软件先禁用该中断 • 对于SGI,软件先检查该中断确定为inactive
3.6. 中断抢占
在一个active中断处理完之前,CPU interface支持发送更高优先级的挂起中断到目标处理器。这种情况必要条件如下:
-
该中断的优先级高于当前CPU interface 被屏蔽的优先级
-
该中断的组优先级高于正在当前CPU interface处理的中断优先级
3.7. 中断屏蔽
CPU interface的GICC_PMR寄存器定义了目标处理器的优先级阀值,GIC仅上报优先级高于阀值的pending中断给目标处理器。寄存器初始值为0,屏蔽所有的中断。
四、FS4412中断外设-key
下面我们来分析FS4412开发板的第一个中断设备按键。
4.1. 电路图
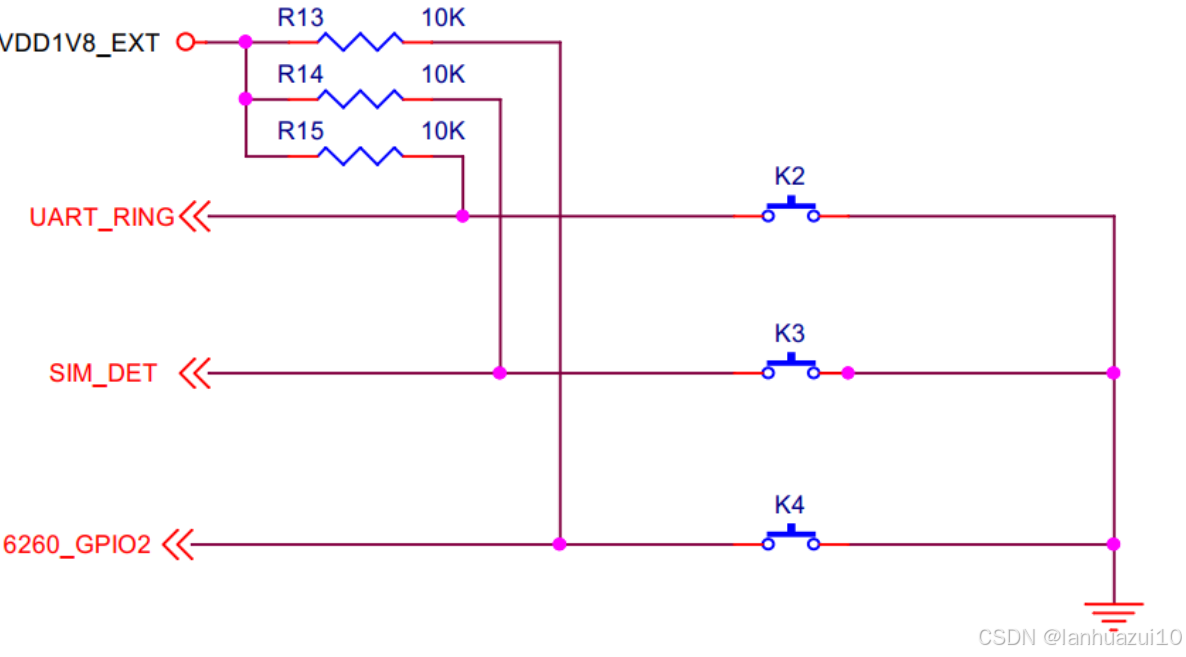
由该电路图可得:
-
按键k2 连接在GPX1_1引脚
-
控制逻辑 k2 按下 ---- K2闭合 ---- GPX1_1 低电压
-
k2 常态 ---- K2打开 ---- GPX1_1 高电压
以下是key2与soc的连接,
![]()
可以看到key2复用了GPIX1_1这个引脚,同时该引脚还可以作为中断【XEINT9】使用。
顺便看下GPXCON寄存器的配置
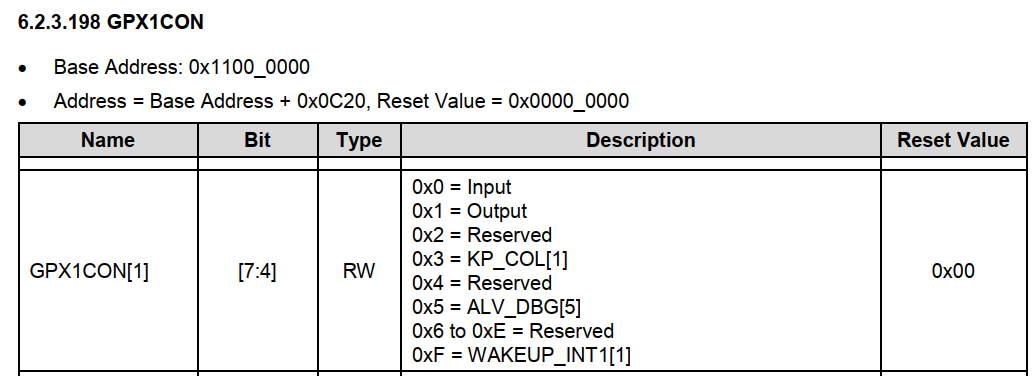
GPX1CON
由上图所示,
-
GPX1CON地址为0x1100C20;
-
key2如果要做为输入设备(轮询查询方式),只需要将GPX1CON[7:4]设置为0x0;
-
key2如果要做为中断信号,只需要将GPX1CON[7:4]设置为0xf。
4.2. key中断处理
中断配置
按键中断寄存器配置流程如下图所示:
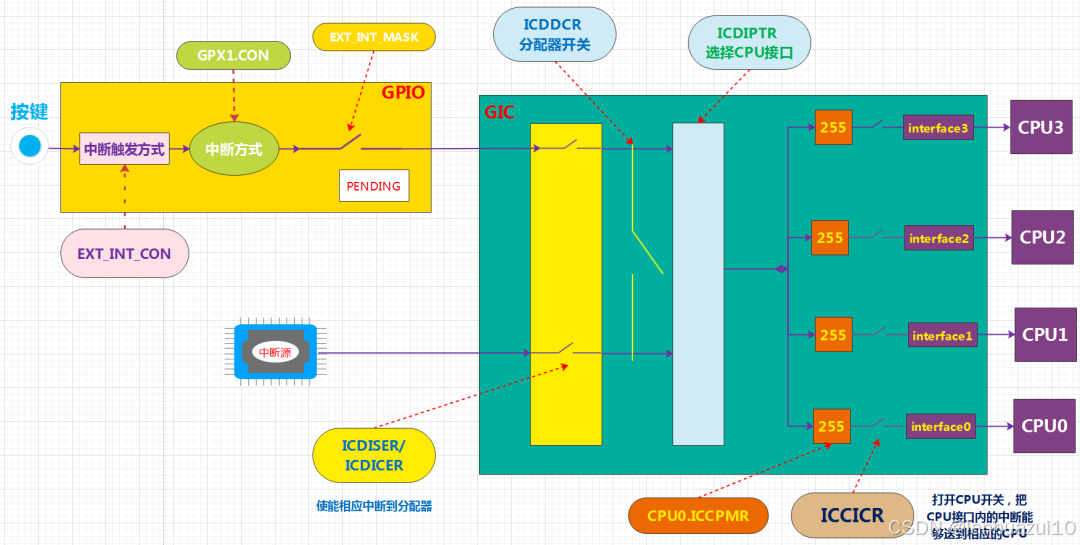
由上图所示,需要依次配置如下寄存器:
-
按键是直接连到GPIO控制器的
-
EXT_INTn_CON用来设置按键中断的触发方式,下降沿触发
-
GPX1CON寄存器用于设置该GPIO位中断信号输入
-
EXT_INTn_MASK用于使能该中断
-
ICDISER用于使能相应中断到分配器
-
ICDDCR分配器开关
-
ICDIPTR选择CPU接口
-
ICCPMR设置中断屏蔽优先级
-
ICCICR打开CPU开关,把CPU接口内的中断能够送到相应的CPU
清中断
CPU处理完中断(4大步3小步),需要清除中断,对于按键来说,有3个寄存器需要操作:
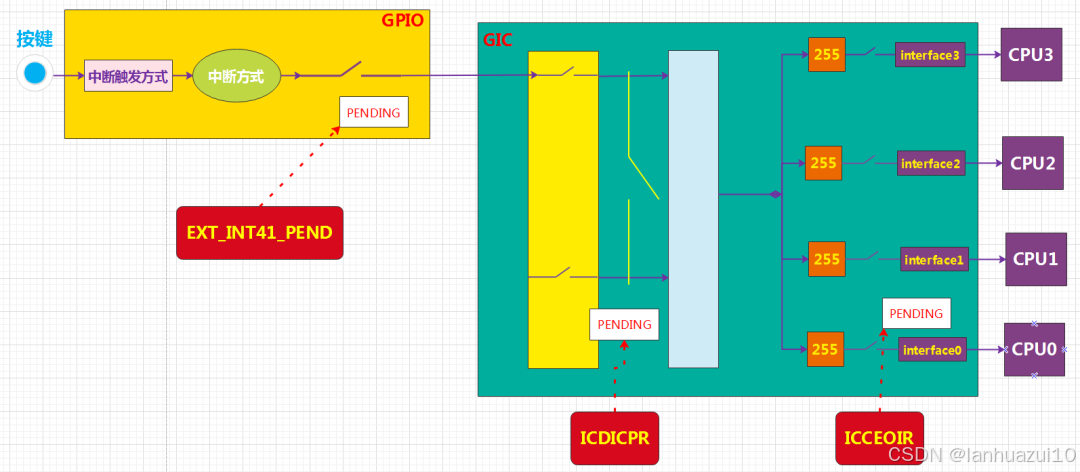
由上图所示:
-
EXT_INT41_PEND清相应的中断源
-
ICDICPR中断结束后,清相应中断标志位,此标志位由硬件置位
-
ICCEOIR中断执行结束,清cpu内相应的中断号,由硬件填充
4.3. 寄存器汇总
前面分析了按键连接的是GPX1_1,现在我们来看下对应的寄存器应该如何配置
4.3.1、GPIO控制器
1. GPX1PUD寄存器

将GPX1_1引脚的上拉和下拉禁止
GPX1PUD[3:2]= 0b00;
2. GPX1CON寄存器
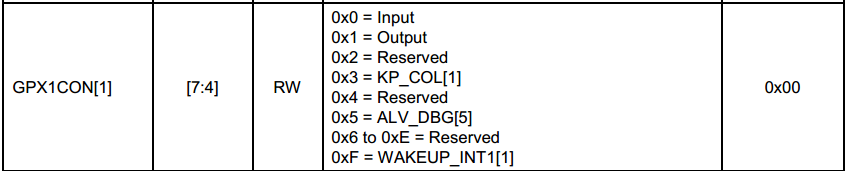
将GPX1_1引脚功能设置为中断功能
GPX1CON[7:4] = 0xf
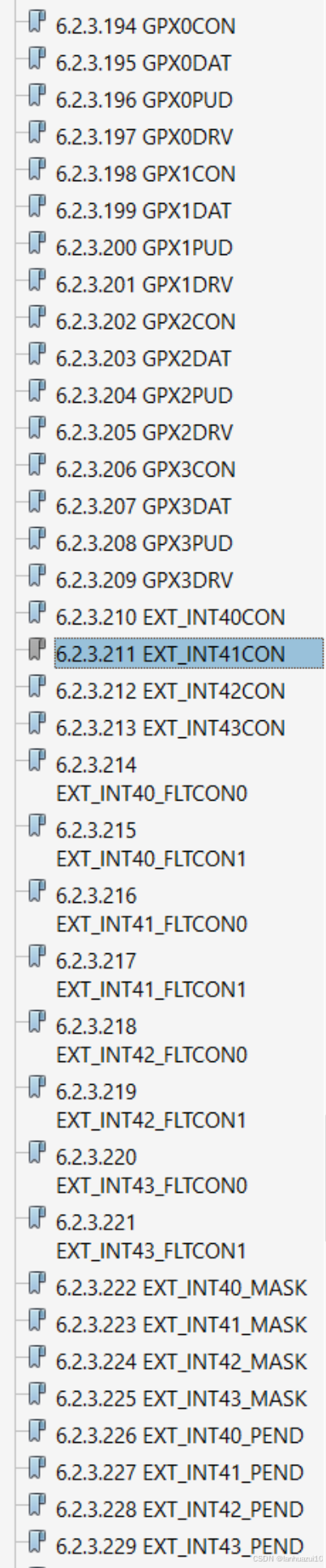
3. EXT_INT41CON寄存器

配置成成下降沿触发:
EXT_INT41CON[6:4] = 0x2
为啥配置INT41,可以看数据手册中的GPIO目录,GPx0-GPX3对应INT40-INT43,key2按键对应GPX1_1,所以对应EXT_INT41CON
4. EXT_INT41_MASK寄存器

中断使能寄存器
EXT_INT41_MASK[1] = 0b0
5. EXT_INT41_PEND 中断状态寄存器

当GPX1_1引脚接收到中断信号,中断发生,中断状态寄存器EXT_INT41_PEND 相应位会自动置1。
注意:中断处理完成的时候,需要手动清除相应状态位。置1清0.
EXT_INT41_PEND[1] =0b1
4.3.2 GIC寄存器组
根据外设中断名称EINT9来查看该中断对应的GIC中维护的HW id。【所有的中断源在芯片厂商设计的时候都分配了唯一的一个ID,GIC通过该ID来驱动中断源】
查看芯片手册(datasheet -- 9.2表)

通过9.2中断源表找到和外设中断标示对应的中断控制器中断标识(GPIO有32个可被唤醒寄存器),其对应「EINT[9],中断ID为57」,这是非常重要的,在后面的寄存器设置中起很大作用;
1) ICDISER_CPU 使能相应中断到分配器
ICDISER寄存器用于使能响应中断到分配器。一个bit控制一个中断源,一个寄存器可以及控制32个中断源,Exynos4412总共有160个中断源,所以每个CPU都对应了5个寄存器。
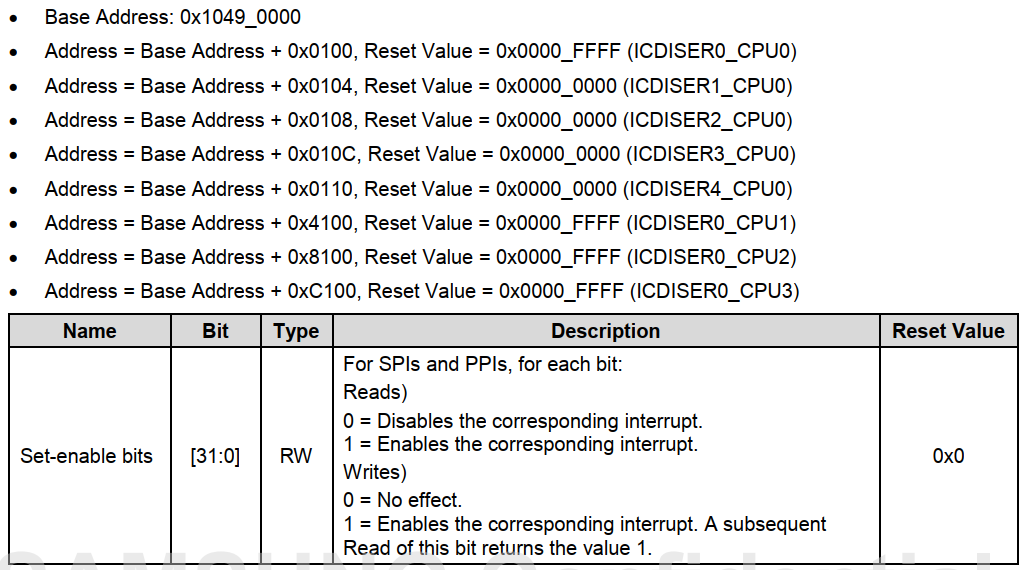
ICDISER用于使能相应中断到分配器,一个bit控制一个中断源,一个ICDISER可以控制32个中断源。这里INT[9] 对应的中断ID为57,所以在ICDSER1中进行设置,57/32 =1余25,要将按键中断分配到CPU0,将寄存器ICDISER1_CPU0的bit[25]置1。
ICDISER.ICDISER1 |= (0x1 << 25); //57/32 =1...25 取整数(那个寄存器) 和余数(哪位)
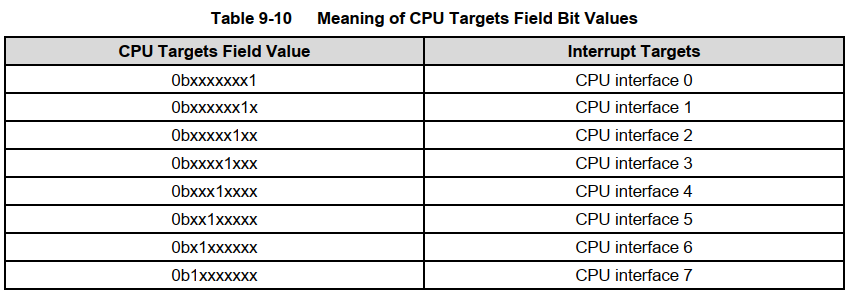
2) ICDIPTR_CPU 选择CPU接口
ICDIPTR_CPU用于为中断处理选择CPU接口。每8个bit控制一个中断源,每个寄存器控制4个中断源,中断源一共有160个,所以每个CPU需要40个寄存器。
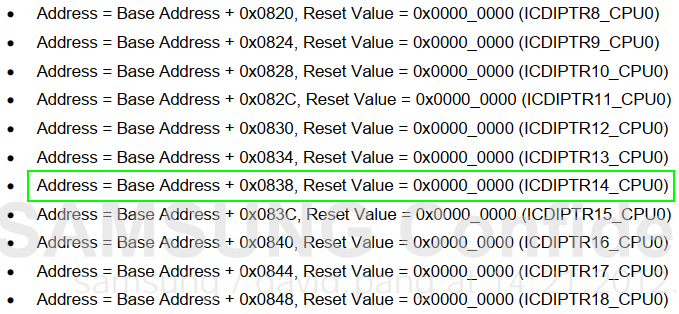
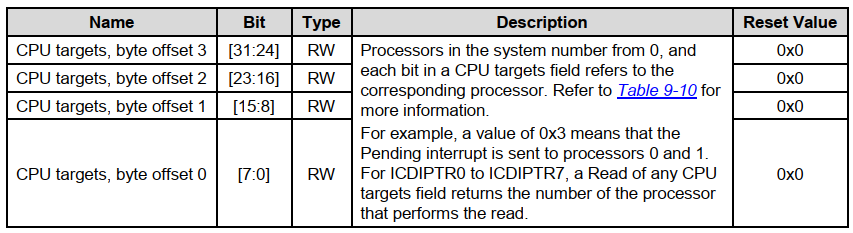
ICDIPTR
选择cpu
ICDIPTR寄存器每8个bit 控制一个中断源,其中CPU0可以处理160个中断源,所以需要40个寄存器。一共8bit, 要选择cpu0第一个bit必须是1,选择cpu1的话第二个bit置1,依次类推。
设置SPI[25]/ID[57]由cpu0处理,57/4=14余1 所以选择寄存器ICDIPTR14_CPU0的第2个字节[15:8]置为0x1。
//SPI 25 interrupts are sent to processor 0
//57/4 = 14..1 14号寄存器的[15:8]
ICDIPTR.ICDIPTR14 |= 0x01<<8;
3) ICDDCR 使能分配器
ICDDCR寄存器用于使能分配器,只使用寄存器第0bit, 如果设置为0,GIC忽略所有的外设中断信号,如果设置为1,监测所有的外中断信号并转发给CPU接口
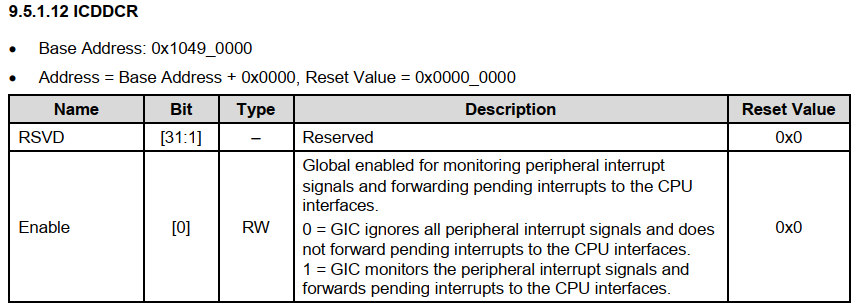
寄存器用于使能分配器。
ICDDCR =1;
4) ICCPMR_CPUn
ICCPMR_CPUn (n=0-3)寄存器为中断屏蔽优先级寄存器,决定cpu能否处理对应的中断。当中断的优先级高于该值,那么interface会将中断信号发送给CPU。
比如中断屏蔽优先级寄存器设置为0xFF,该值表示优先级最低,所有的中断都能响应。
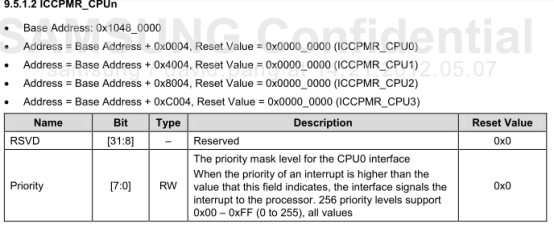
CPU0.ICCPMR = 0xFF;//设置cpu0 中断屏蔽优先级为255 最低,所有中断都能响应)
5) ICCICR_CPUn 全局使能cpu0中断处理
ICCICR_CPUn (n=0-3)寄存器为全局使能CPU中断处理使能开关,用于控制CPU interface中的中断信号是否发送给与其连接的处理器
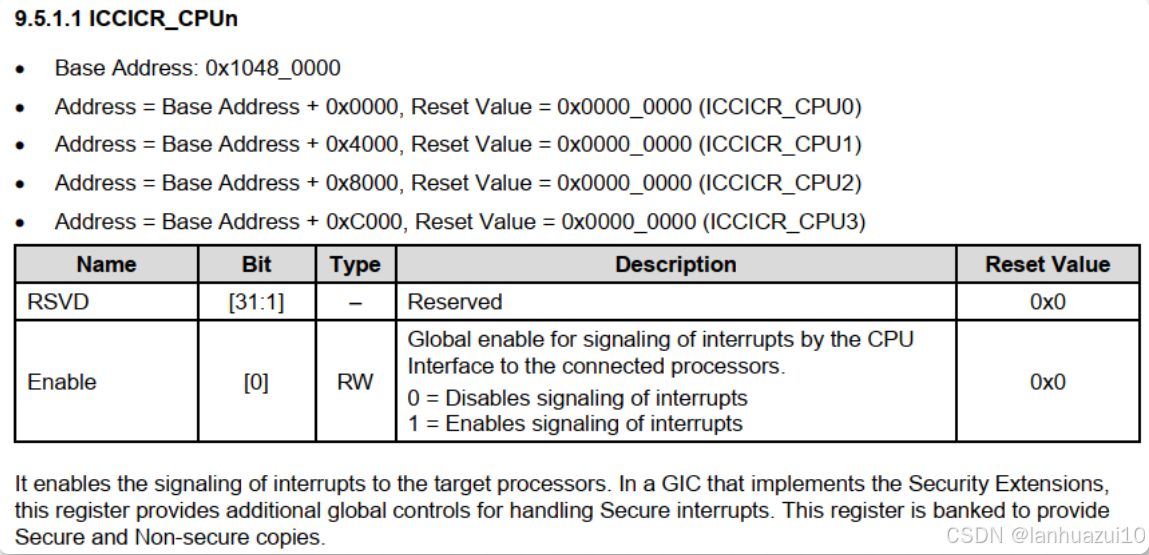
EXYNOS 4412一共有4个cpu,用4个寄存器分别来控制4个cpu,每个寄存器的bit[0]用于全局控制对应的cpu。比如选择cpu0处理中断,将bit[0]置1即可。
CPU0.ICCICR |= 0x1;
使能中断到CPU。
6) ICCIAR_CPUn
寄存器ICCIAR_CPUn (n=0-3)寄存器存放正在处理中断的HW id号。
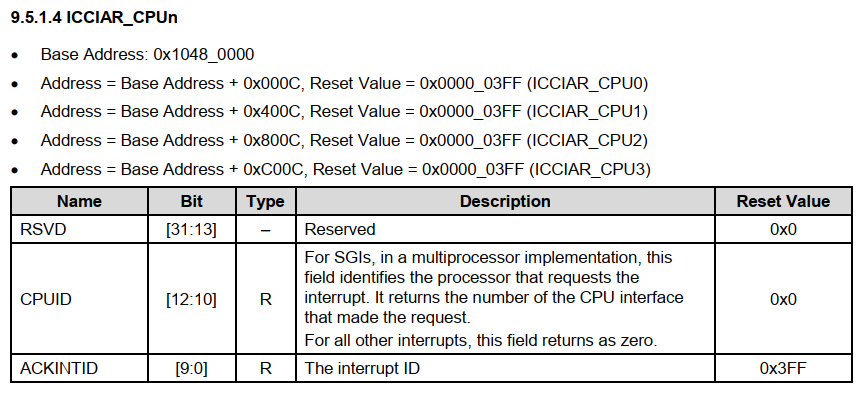
当中断发生之后,中断的HW id值会由硬件写入到寄存器ICCIAR[9:0]中;对于SGIs来说,多处理器环境下,CPU的interface值写入到[12:10]中。
读取HW id:
int irq_num;
irq_num = CPU0.ICCIAR&0x3ff; //获取中断号
7) ICDICPR_CPU
ICDICPR_CPUn寄存器清除GIC相应中断标志位。一个bit控制一个中断源,一个寄存器可以控制32个中断源,Exynos4412总共有160个中断源,所以每个CPU都对应了5个ICDICPR寄存器。

这里INT[9] 对应的中断ID为57,所以在ICDICPR1中进行设置,57/32 =1余25,要将按键中断分配到CPU0,将寄存器ICDICPR1_CPU0的bit[25]置1。
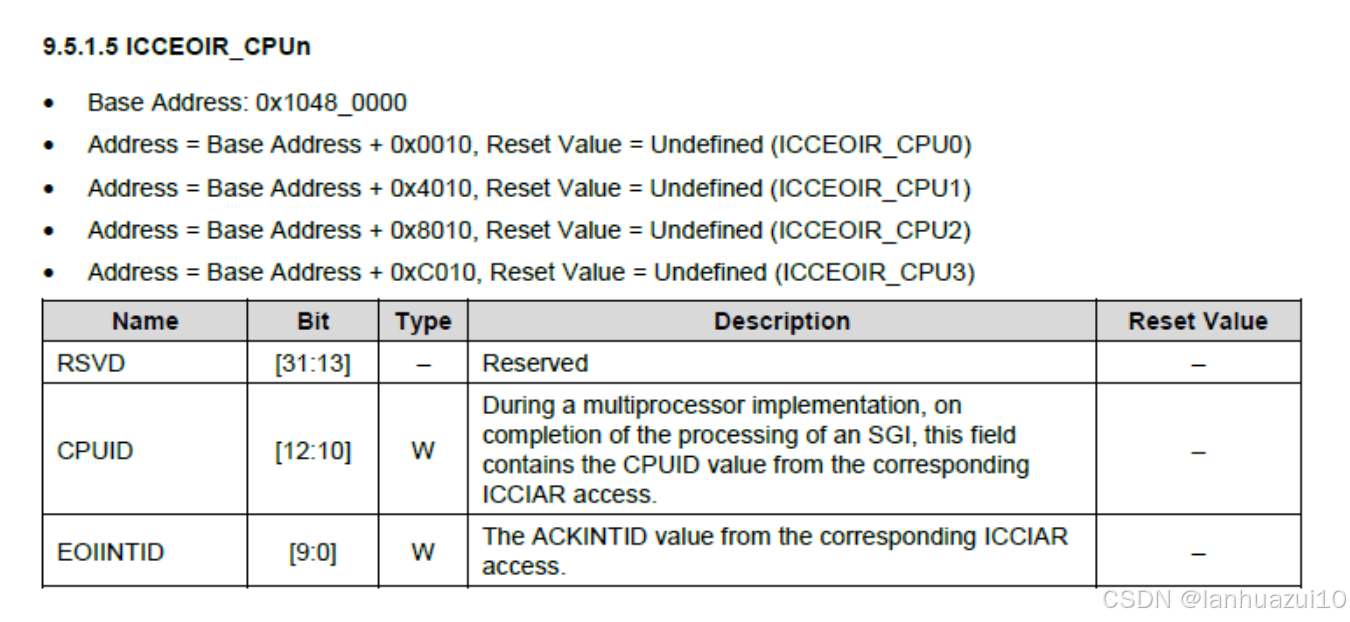
7) ICCEOIR_CPUn
ICCEOIR_CPUn寄存器通过写入相应的中断号清除中断。一个CPU对应一个ICCEOIR寄存器。通过将HW id写入ICCEOIR[9:0], 即可清除中断。
五、代码实现
要处理中断异常,必须安装异常向量表,异常的处理流程可以参考前面的文章《6. 从0开始学ARM-异常、异常向量表、swi》
5.1. 异常向量表基址
异常向量表地址是可以修改的,比如uboot在启动的时候,会从flash中搬运代码到RAM中,而flash的异常向量表地址和ram的地址肯定不一样,所以搬运完代码后,就必须要修改对应的异常向量表地址。
修改异常向量表的地址的需要借助协处理器指令mcr:
ldr r0,=0x40008000
mcr p15,0,r0,c12,c0,0 @ Vector Base Address Register
上述命令是将地址0x40008000设置为异常向量表的地址,关于mcr指令,我们没有必要深究,知道即可。
RAM中异常向量表地址我们选用的是0x40008000,以下是exynos4412 地址空间分布。
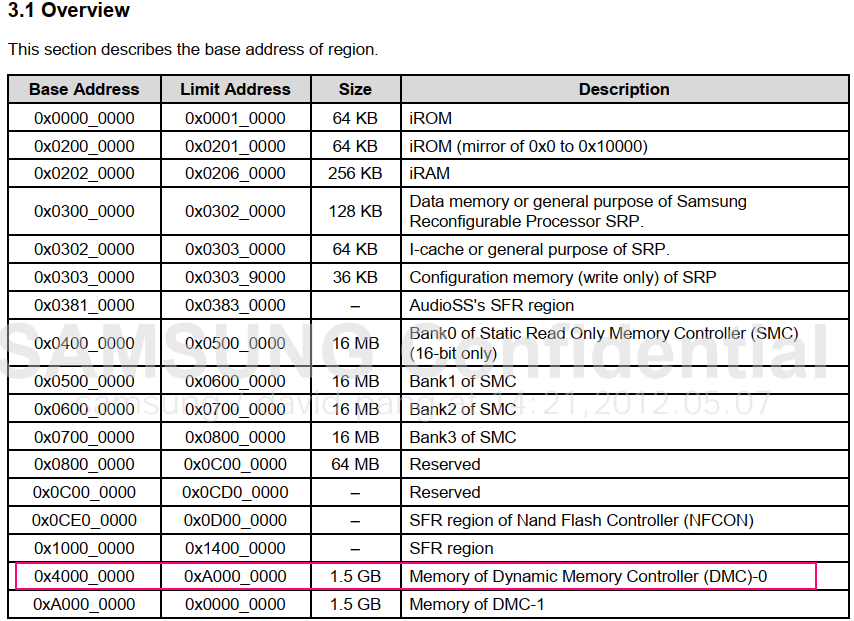
exynos4412 地址分布
5.2. 异常向量表安装
异常向量表在每个文件夹下的cpu/start.s里面
.text
.global _start
_start:
b reset
ldr pc,_undefined_instruction
ldr pc,_software_interrupt
ldr pc,_prefetch_abort
ldr pc,_data_abort
ldr pc,_not_used
ldr pc,=irq_handler
ldr pc,_fiq
reset:
ldr r0,=0x40008000
mcr p15,0,r0,c12,c0,0 @ Vector Base Address Register
init_stack:
//初始化栈
……
b main //跳转至c的main函数
irq_handler: //中断入口函数
sub lr,lr,#4 //修正返回地址
stmfd sp!,{r0-r12,lr} //入栈,保存现场寄存器
.weak do_irq //声明弱函数
bl do_irq //跳入中断处理历程
ldmfd sp!,{r0-r12,pc}^ //出栈 ,恢复现场寄存器,返回现场PC=LR,这两步是同时完成的
stacktop: .word stack+4*512//栈顶
.data
stack: .space 4*512 //栈空间
进入main()函数中执行中断入口函数do_irq()
void do_irq(void)
{
static int a = 1;
int irq_num;
irq_num = CPU0.ICCIAR&0x3ff; //获取中断号
switch(irq_num)
{
case 57:
printf("in the irq_handler\n");
//清GPIO中断标志位
EXT_INT41_PEND = EXT_INT41_PEND |((0x1 << 1));
//清GIC中断标志位
ICDICPR.ICDICPR1 = ICDICPR.ICDICPR1 | (0x1 << 25);
break;
}
//清cpu中断标志,所有终端源都可以你这么清,可以放在条件外面
CPU0.ICCEOIR = CPU0.ICCEOIR&(~(0x3ff))|irq_num;位
}
实现按键中断的初始化函数key_init():
这里最重要根据电路图找到使用的哪个控制器外部中断引脚,在查找数据手册的9-2表,找到对应的中断源,初始化所有的设置都是根据中断源来配置的。
![]()
设置完下面这些,按键中断就可以到达CPU,被CPU处理中断。
void key_init(void)
{
GPX1.CON =GPX1.CON & (~(0xf << 4)) |(0xf << 4); //配置引脚功能为外部中断
GPX1.PUD = GPX1.PUD & (~(0x3 << 2)); //关闭上下拉电阻
EXT_INT41_CON = EXT_INT41_CON &(~(0xf << 4))|(0x2 << 4); //外部中断触发方式为下降沿触发
EXT_INT41_MASK = EXT_INT41_MASK & (~(0x1 << 1)); //使能中断
ICDDCR = 1; //使能分配器
ICDISER.ICDISER1 = ICDISER.ICDISER1 | (0x1 << 25); //使能相应中断到分配器
ICDIPTR.ICDIPTR14 = ICDIPTR.ICDIPTR14 & (~(0xff << 8))|(0x1 << 8); //选择CPU接口
CPU0.ICCPMR = 255; //中断屏蔽优先级
CPU0.ICCICR = 1; //使能中断到CPU
return ;
}
六、轮询方式
除了中断方式之外我们还可以通过轮询方式读取按键的信息,原理如下:
循环检测GPX1_1引脚输入的电平,为低电压时,按键按下,为高电平时,按键抬起。
1. 配置GPX1_1引脚功能为输入模式,设置内部上拉下拉禁止。
GPX1.CON = GPX1.CON &(~(0xf<<4)) ;
GPX1.PUD = GPX1.PUD & ~(0x3 << 2);
2. 按键消抖:按键按下后由于机械特性,会在极短的时间内出现电平忽0忽1,所以我们检测到按键按下后,需要给一个延时,然后再判断按键是不是仍然按下。
3.代码实现
int main (void)
{
led_init();
pwm_init();
GPX1.CON = GPX1.CON &(~(0xf<<4))|0x0<<4;
while(1)
{
if(!(GPX1.DAT & (0x1<<1))) // 返回为真,按键按下电平为0
{
delay_ms(10); //延时去抖动
if(!(GPX1.DAT & (0x1<<1))) //二次检测电平是否为0,去抖
{
GPX2.DAT |= 0x1 << 7; //Turn on LED2
delay_ms(500);
beep_on();
GPX2.DAT &= ~(0x1<<7); //Turn off LED2
delay_ms(500);
while(!(GPX1.DAT & (0x1<<1))); //判断按键是否弹起
beep_off(); //按键弹起蜂鸣器停止叫
}
}
}
return 0;
}
最后贴下完整代码 main.c
#include "exynos_4412.h"
//#include "led.h"
void delay_ms(unsigned int num)
{
int i,j;
for(i=num; i>0;i--)
for(j=1000;j>0;j--)
;
}
void pwm_init(void)
{
GPD0.CON = GPD0.CON & (~(0xf))| 0x2;
GPD0.PUD = GPD0.PUD & (~(0xf)) | 0x3;
PWM.TCFG0 = PWM.TCFG0 & (~(0xff))|0xff;
PWM.TCFG1 = PWM.TCFG1 & (~(0xf)) | 0x2;
PWM.TCMPB0 = 50;
PWM.TCNTB0 = 100;
PWM.TCON = PWM.TCON & (~(0xff)) | (1 << 0) | (1 << 1) ;
}
void beep_on(void)
{
PWM.TCON = PWM.TCON & (~(0xff)) | (1 << 0) | (1 << 3) ;
}
void beep_off(void)
{
PWM.TCON = PWM.TCON & (~(1 << 0)) ;
}
#define SYS_SET_FREQUENCE 25000
void beep_set_frequence( unsigned int fre )
{
//若蜂鸣器的发声频率为0则返回
if( 0==fre )
return ;
PWM.TCMPB0 = SYS_SET_FREQUENCE/(fre+fre); //根据设定频率重新设定计数器比较的值
PWM.TCNTB0 = SYS_SET_FREQUENCE/fre; //根据频率重新调整计数值
}
const unsigned char dahai[] =
{
0x13, 0x15 , 0x16, 0x16, 0x16, 0x16, 0x21, 0x16, 0x15, 0x15, 0x16, 0x15, //哀愁
0x13, 0x12 , 0x11, 0x11, 0x11, 0x11, 0x12, 0x13,
0x13, 0x12 , 0x11, 0x11, 0x11, 0x11, 0x21, 0x16, 0x15, 0x15, 0x16, 0x15,
0x13, 0x15, 0x16, 0x21, 0x21, 0x16, 0x15, 0x15,//飘远
};
/*
* 大海的简谱, 控制每一个音的时间 1为长时间 4为短时间
*/
const unsigned char time[] =
{
4, 4, 4, 2, 4 , 2, 4, 4, 4, 2, 4, 2 ,//哀愁
4, 4, 4, 2, 4, 2, 2, 1,
4, 4, 4, 2, 4, 2, 4, 4, 4, 2, 4, 2,
4, 4, 2, 4, 2, 4, 4, 1 //飘远
};
const unsigned int yinyue[3][7]
={
262, 294, 330, 370, 415, 266, 294, //低音
523, 578, 659, 698, 784, 880, 988, //中音
1046, 1174, 1318, 1396, 1567, 1700, 1975 //高音
};
void led_init(void)
{
GPX2.CON = GPX2.CON & (~(0xf0000000)) | 0x10000000;
GPX1.CON = GPX1.CON & (~(0x0000000f)) | 0x00000001;
GPF3.CON = GPF3.CON & (~(0x000f0000)) | 0x00010000;
GPF3.CON = GPF3.CON & (~(0x00f00000)) | 0x00100000;
}
void led_on(int n)
{
switch(n)
{
case 0:
GPX2.DAT = GPX2.DAT|0x80;
break;
case 1:
GPX1.DAT = GPX1.DAT|0x01;
break;
case 2:
GPF3.DAT = GPF3.DAT|0x10;
break;
case 3:
GPF3.DAT = GPF3.DAT|0x20;
break;
}
}
void led_off(int n)
{
switch(n)
{
case 0:
GPX2.DAT = GPX2.DAT&(~(0x80));
break;
case 1:
GPX1.DAT = GPX1.DAT&(~(0x01));
break;
case 2:
GPF3.DAT = GPF3.DAT&(~(0x10));
break;
case 3:
GPF3.DAT = GPF3.DAT&(~(0x20));
break;
}
}
void do_irq(void)
{
static int a = 1;
int irq_num;
irq_num = CPU0.ICCIAR&0x3ff; //获取中断号
switch(irq_num)
{
case 57:
printf("in the irq_handler\n");
if(a)
led_on(1);
else
led_off(1);
a = !a;
EXT_INT41_PEND = EXT_INT41_PEND |((0x1 << 1)); //清GPIO中断标志位
ICDICPR.ICDICPR1 = ICDICPR.ICDICPR1 | (0x1 << 25); //清GIC中断标志位
break;
}
CPU0.ICCEOIR = CPU0.ICCEOIR&(~(0x3ff))|irq_num; //清cpu中断标志位
}
/*
* 裸机代码,不同于LINUX 应用层, 一定加循环控制
*/
int main (void)
{
led_init();
pwm_init();
#if 1
//key中断方式代码
GPX1.CON =GPX1.CON & (~(0xf << 4)) |(0xf << 4); //配置引脚功能为外部中断
GPX1.PUD = GPX1.PUD & (~(0x3 << 2)); //关闭上下拉电阻
EXT_INT41_CON = EXT_INT41_CON &(~(0xf << 4))|(0x2 << 4); //外部中断触发方式
EXT_INT41_MASK = EXT_INT41_MASK & (~(0x1 << 1)); //使能中断
ICDDCR = 1; //使能分配器
ICDISER.ICDISER1 = ICDISER.ICDISER1 | (0x1 << 25); //使能相应中断到分配器
ICDIPTR.ICDIPTR14 = ICDIPTR.ICDIPTR14 & (~(0xff << 8))|(0x1 << 8); //选择CPU接口
CPU0.ICCPMR = 255; //中断屏蔽优先级
CPU0.ICCICR = 1; //使能中断到CPU
while(1);
#else
//key轮询方式代码
GPX1.CON = GPX1.CON &(~(0xf<<4))|0x0<<4;
while(1)
{
if(!(GPX1.DAT & (0x1<<1))) // 返回为真,按键按下
{
delay_ms(10);
if(!(GPX1.DAT & (0x1<<1))) //二次检测,去抖
{
GPX2.DAT |= 0x1 << 7; //Turn on LED2
delay_ms(500);
beep_on();
GPX2.DAT &= ~(0x1<<7); //Turn off LED2
delay_ms(500);
while(!(GPX1.DAT & (0x1<<1)));
beep_off();
}
}
}
#endif
return 0;
}

















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









