







问题描述
在二维坐标系中,太阳的坐标为
(
s
x
,
s
y
)
(sx, sy)
(sx,sy),有m条平行于x轴的线段,其坐标、长度和高度为
(
x
i
,
l
i
,
h
i
)
i
=
1
,
2
,
.
.
.
,
m
(x_i, l_i, h_i) _{i=1,2,...,m}
(xi,li,hi)i=1,2,...,m,问多少条线段能够被太阳照到。输入条件
0
<
=
h
i
<
s
y
0<=h_i<sy
0<=hi<sy。
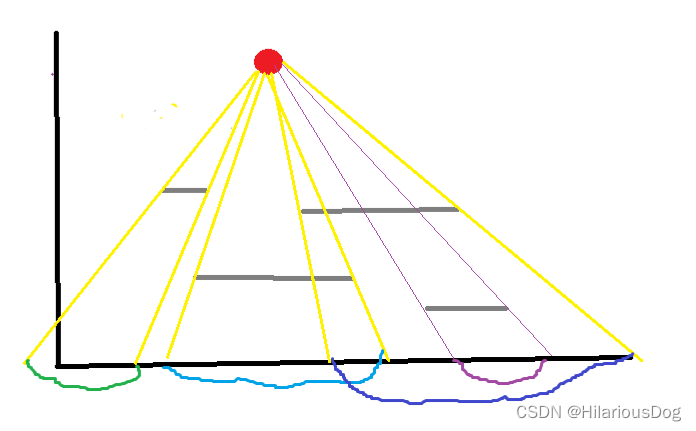
解析
将所有线段从高到底排序,之后依次遍历计算其在x轴上的投影,如果与已有的投影段重合,则说明不能被太阳照到。需要特别注意投影段的更新过程,这里采用map保存阴影段的左端点和右端点横坐标,应该有更简洁的实现方法。
#include <algorithm>
#include <vector>
#include <iostream>
#include <map>
using namespace std;
// 记录x轴上的阴影段的有序集合
static map<double, double> record;
// 保存线段的类
struct Line
{
int xl;
int xr;
int y;
Line(int x, int y_, int l) : xl(x), xr(x + l), y(y_) {}
};
bool operator<(const Line &lhs, const Line& rhs)
{
return lhs.y < rhs.y;
}
// 保存Line的vector
static vector<Line> lines;
// 计算由(x, y)和(sx, sy)确定的点与x轴的交点的横坐标
constexpr double cal(double x, double y, double sx, double sy)
{
return x - y * (x - sx) / (y - sy);
}
// 将新的阴影段加入集合record,并返回是否没有被阴影段覆盖
bool addLine(double xl, double xr)
{
bool res = true;
auto edge_left = record.upper_bound(xl);
auto edge_right = record.upper_bound(xr);
if (edge_left != record.begin() && xr <= (--edge_left)++->second)
res = false;
else
{
// 没有重合,则加入阴影段集合
if (edge_left != record.begin())
{
--edge_left;
if (xl <= edge_left->second) xl = edge_left->first;
else ++edge_left;
}
if (edge_right != record.begin())
{
--edge_right;
if (xr <= edge_right->second) xr = edge_right->second;
++edge_right;
}
record.erase(edge_left, edge_right);
record.insert({xl, xr});
}
return res;
}
int main()
{
int ans = 0;
// 读取太阳点和线段数量
int m, sx, sy;
cin >> m >> sx >> sy;
while (m--)
{
int x, y, l;
cin >> x >> y >> l;
lines.emplace_back(x, y, l);
}
// 将线段从高到低排序
sort(lines.rbegin(), lines.rend());
for (auto &li : lines)
{
// 计算在x轴上的阴影起始位置
double xl = cal(li.xl, li.y, sx, sy);
double xr = cal(li.xr, li.y, sx, sy);
if (addLine(xl, xr)) ++ans;
}
cout << ans << endl;
return 0;
}















 158
158











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











