







 本文介绍了一个使用L298N电机驱动模块的测试程序,该程序能够控制小车完成前进、后退及转向等动作,并详细解释了程序的工作原理及接线方式。
本文介绍了一个使用L298N电机驱动模块的测试程序,该程序能够控制小车完成前进、后退及转向等动作,并详细解释了程序的工作原理及接线方式。
L298N 各接线口说明如下图
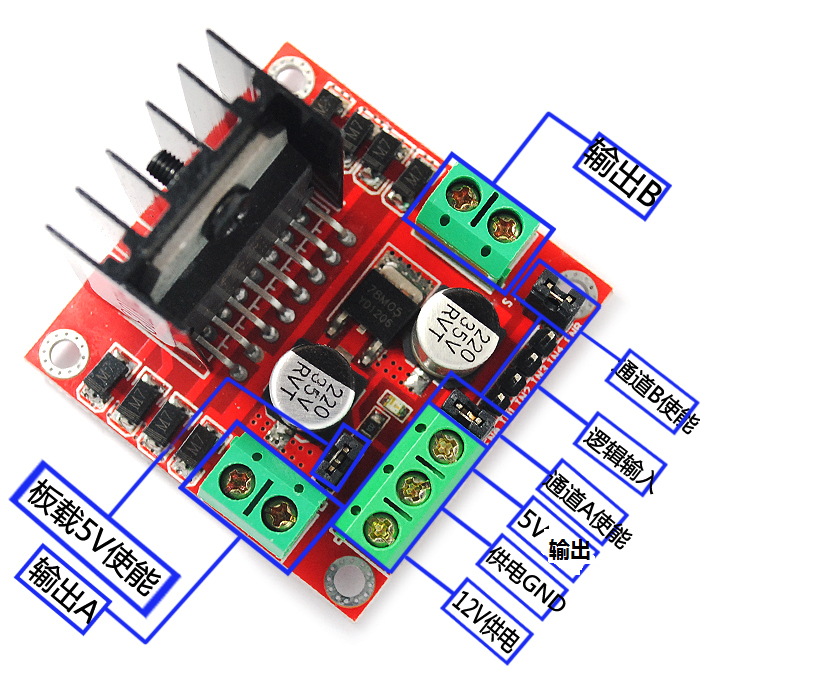
PS:驱动供电电源(6-12V) 要接 12V供电 5V输出用来给单片机供电( 5v输出端一定要利用上,否则驱动板将无法工作)
在80C51系列单片测试程序 如下(本人用的是89C52):
/*************************************************************
* 时间:2016.10.9
* 环境:stc 89c51 rc 晶振11.0592
* 电机驱动模块为 L298N电机驱动
* 目的:测试学习 电机驱动模块 L298N
* 功能描述:控制小车前进10S 后退10S 原地顺时针转10S 逆时针转10S
****************************************************************/
#include<reg52.h>
//ENA引脚控制第一路电机的使能端( 控制第一路电机是否工作 高电平有效 )
//具体参照L298N说明手册
sbit ENA = P1^0; //定义引脚ENA引脚 如果没拔跳线帽的话不用定义
sbit IN1 = P1^1;
sbit IN2 = P1^2;
sbit IN3 = P1^3;
sbit IN4 = P1^4;
//ENB引脚控制第二路电机的使能端( 控制第二路电机是否工作 高电平有效 )
sbit ENB = P1^5;
void delayed(unsigned int x); //延时xmS
void front(); //前进函数
void back(); //后退
void right(); //右转
void left(); //左拐
void main()
{
int i;
front(); //前进
for(i = 10;i >0; i--) //延时10S
{
delayed(1000);//每轮延时1S 循环十次 10S
}
back();
for(i = 10;i >0; i--) //延时10S
{
delayed(1000);//每轮延时1S 循环十次 10S
}
right();
for(i = 10;i >0; i--) //延时10S
{
delayed(1000);//每轮延时1S 循环十次 10S
}
left();
for(i = 10;i >0; i--) //延时10S
{
delayed(1000);//每轮延时1S 循环十次 10S
}
//制动俩路电机
ENA = 0;
ENB = 0;
while(1);
}
void delayed(unsigned int x) //延时xmS
{
unsigned int i,j;
for(i = x; i > 0; i--)
{
for(j = 113; j >0; j--);
}
}
void front() //前进函数
{
ENA = 1; //一般有跳线帽 就直接连接到了高电平上
ENB = 1; //同上
//第一路电机 正转
IN1 = 0;
IN2 = 1;
//第二路电机 正转
IN3 = 0;
IN4 = 1;
}
void back() //后退
{
ENA = 1; //启动第一路电机
ENB = 1; //启动第二路电机
//第一路电机 反转
IN1 = 1;
IN2 = 0;
//第二路电机 反转
IN3 = 1;
IN4 = 0;
}
//右拐函数 有拐有两种策略
//左侧轮子正转 右侧反转 或者 右侧不转
void right() //右转
{
ENA = 1;
ENB = 1;
// 第一路正转
IN1 = 0;
IN2 = 1;
// 第二路反转
IN3 = 1;
IN4 = 0;
/*
//每轮循环500 共 2秒 让它转够90度
//如果电机快的话让延时函数里面的参数小点
//如果电机快的话让延时函数里面的参数小点
delayed(500); //延时500ms
//然后将反转的改为正转 让其向前
IN3 = 0;
IN4 = 1; */
}
//参考右转函数
void left() //左拐函数
{
ENA = 1;
ENB = 1;
IN1 = 1;
IN2 = 0;
IN3 = 0;
IN4 = 1;
/*
//每轮循环500 共 2秒 让它转够90度
//如果电机快的话让延时函数里面的参数小点
//如果电机快的话让延时函数里面的参数小点
delayed(500); //延时500ms 供电不同电机速度不同 需要自己找到合适的值
//然后将反转的改为正转 让其向前
IN1 = 0;
IN2 = 1;
*/
}
















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









