







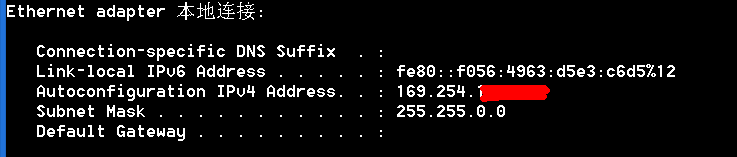
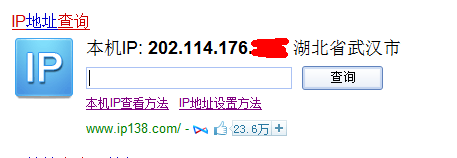
1、本地ip与网上查询到ip不一致?
本地ip:(内网ip)
宽带ip:(外网ip)
二者的区别在于:
本地ip是网卡上所拿到的ip,可有路由器进行分配(DHCP协议)
宽带ip是电信运营商自动分配给你的宽带连接
二者的关系相当于:
宽带ip就是街道号,本地ip就是门牌号,如果要找到你的家门首先需要通过宽带ip(外网ip)找到你的街道号,然后通过本地ip(内网ip)找到你的门牌号。
自动获取ip什么意思?
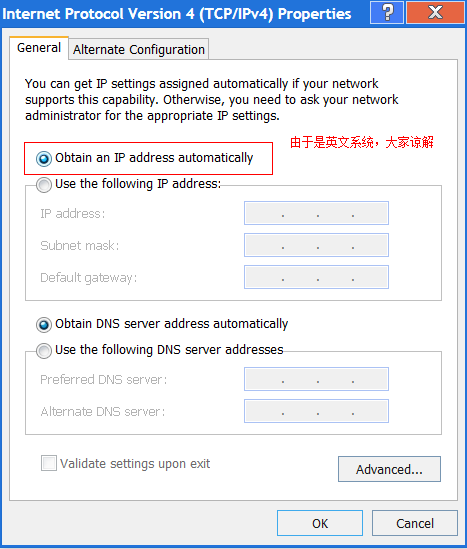
大家想一下这种情况,大家有一个外网ip,然后可以设置出来很多本地ip,但如果你跟同一局域网里面的电脑设置了同一个本地ip,那么会发生什么?导致你的电脑无法被外网识别,这个时候就需要通过自动获取ip,在进行设置只为你的电脑分配还没有占用的本地ip,从而使这个问题得到解决。
端口映射:(路由器端口映射)
第一:首先你需要有进入路由器设置的权限
第二:进入路由器设置后,在【虚拟服务器】设置中增加端口,即可通过【外网ip + 端口】形式访问你的电脑
【虚拟服务器】:就是把内网ip的端口映射到外网ip的一个端口
详细设置参见:http://jingyan.baidu.com/article/1709ad80d599d24634c4f0c2.html
DHCP协议:
(Dynamic Host Configuration Protocol)动态主机配置协议
我们都知道电脑之间的通信是通过MAC地址,而MAC地址太复杂,所以就有了IP,通过DHCP服务器,当主机访问到服务器时就会动态分配给主机一个唯一IP,而当一个局域网中有很多台主机时,网络管理员则需要对每台电脑进行ip分配,手动配置太耗时,而且容易出错,所以通过动态分配ip
MAC地址:
Media Access Control,介质访问控制,MAC地址也叫物理地址,是由网络设备生产厂商写入硬件内部,每台电脑都有唯一的物理地址;
详细参见:参见:http://blog.csdn.net/lhshaoren/article/details/8889822
2、局域网用户是如何上网的?(具体实现)
1、直接路由
要求客户机有真实的IP,但是IP可是稀缺资源,所以这种方式很少了
2、NAT(路由转换协议)
NAT协议很好解决了IP地址不足的问题,NAT是将IP数据包头中的IP地址转换成另外一个IP,在实际应用中NAT主要用于解决私有网络访问外部网络的问题。
私有IP地址是指内部网络或主机地址,公有IP是全球唯一的IP。
RFC 1918为私有网络预留出三个IP地址块:
A类:10.0.0.0 --- 10.255.255.255
B类:172.16.0.0 --- 172.16.255.255
C类:192.168.0.0 --- 192.168.255.255
上述三个范围的IP地址快不会在因特网上被分配,因此不需要想ISP申请,自由使用。
NAT功能:
① 宽带分享:这是NAT最重要的功能
②安全防护:NAT之内的主机访问到因特网显示的是外网IP,所以可以对内部主机起到一定的安全作用
3、代理服务器
在客户机和服务器之间增加一个中介,即代理服务器,相对于客户机而言代理服务器相当于服务器,相对于服务器而言代理服务器相当于客户机。
使用代理服务器的作用有哪些:
① 绕过访问限制(翻墙)
② 匿名访问
③ 局域网通过代理联网
④ 通过代理缓存,提高上网速度
NAT与代理服务器的区别:
①:NAT工作在网络层,需要对IP数据包进行拆分重组;Proxy工作在应用层,需要了解具体的应用层协议。
②:NAT因为工作在低层,支持协议较多,速度较快;Proxy支持协议较少,速度较慢。
DHCP与NAT协议的区别:
DHCP用于动态分配IP地址
NAT用于让这些IP访问到互联网
3、参考文档:
http://www.ruanyifeng.com/blog/2012/05/internet_protocol_suite_part_i.html
http://www.ruanyifeng.com/blog/2012/06/internet_protocol_suite_part_ii.html
这两篇文章,对互联网协议从上到下进行一个很详细的解说















 114
114

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









