







Non-local操作是早期self-attention在视觉任务上的尝试,核心在于依照相似度加权其它特征对当前特征进行增强,实现方式十分简洁,为后续的很多相关研究提供了参考
来源:晓飞的算法工程笔记 公众号
论文: Non-local Neural Networks
Introduction

卷积操作通常在局部区域进行特征提取,想要获取范围更广的特征信息需要重复进行卷积操作来获得,这样不仅耗时还增加了训练难度。为此,论文提出高效的non-local操作,将特征图上的特征点表示为所有特征点的加权和,用于捕捉覆盖范围更广的特征信息。non-local操作也可以用于含时序的任务中,如图1的视频分类任务,可综合几帧的特征来增强当前帧的特征。
non-local操作主要有以下优点:
- 相对于叠加卷积的操作,non-local可通过特征点间的交互直接捕捉更广的特征信息。
- 从实验结果来看,简单地嵌入几层non-local操作就能高效地提升网络性能。
- non-local操作支持可变输入,可很好地与其它网络算子配合。
Non-local Neural Networks
Formulation
首先定义通用的non-local操作:

i
i
i为特征图上将要计算特征值的位置坐标,
j
j
j为特征图上的所有位置坐标,
x
x
x为对应位置上的输入特征,
y
y
y为增强后的输出,
f
f
f计算
i
i
i和
j
j
j之间的相似性,
g
g
g则用于对
j
j
j的特征进行转化,
C
\mathcal{C}
C用于对输出进行归一化。
简而言之,non-local的核心就是计算当前位置的特征与特征图所有特征间的相似性,然后根据相似性对所有特征加权输出。相对于卷积和全连接等参数固定的操作,non-local更加灵活。
Instantiations
在实现时,函数 f f f和函数 g g g的选择很多。为了简便,函数 g g g选择为线性变换 g ( x j ) = W g x j g(x_j)=W_gx_j g(xj)=Wgxj, W g W_g Wg为可学习的权重矩阵,一般为 1 × 1 1\times 1 1×1的卷积。而函数 f f f则可以有以下选择(论文通过实验发现函数 f f f的具体实现影响不大):

x i T x j x^T_i x_j xiTxj为点积相似度,也可采用欧氏距离, C ( x ) = ∑ ∀ j f ( x i , x j ) \mathcal{C}(x)={\sum}_{\forall j}f(x_i, x_j) C(x)=∑∀jf(xi,xj),归一化类似于softmax操作。

θ ( x i ) = W θ x i \theta(x_i)=W_{\theta}x_i θ(xi)=Wθxi和 ϕ ( x j ) = W ϕ x j \phi(x_j)=W_{\phi}x_j ϕ(xj)=Wϕxj为两个线性变换, C ( x ) = ∑ ∀ j f ( x i , x j ) \mathcal{C}(x)={\sum}_{\forall j}f(x_i, x_j) C(x)=∑∀jf(xi,xj),这个实现与self-attention十分接近。

先线性变换,然后通过点积计算相似度, C ( x ) = N \mathcal{C}(x)=N C(x)=N,有助于简化梯度计算。

直接将特征conate起来,通过权重向量 w f T w^T_f wfT转化为标量输出, C ( x ) = N \mathcal{C}(x)=N C(x)=N。
Non-local Block
将公式1的non-local操作修改成non-local block,可插入到当前的网络架构中,non-local block的定义为:

公式6将non-local操作的输出线性变换后与原特征进行相加,类似于residual block的嵌入方式。
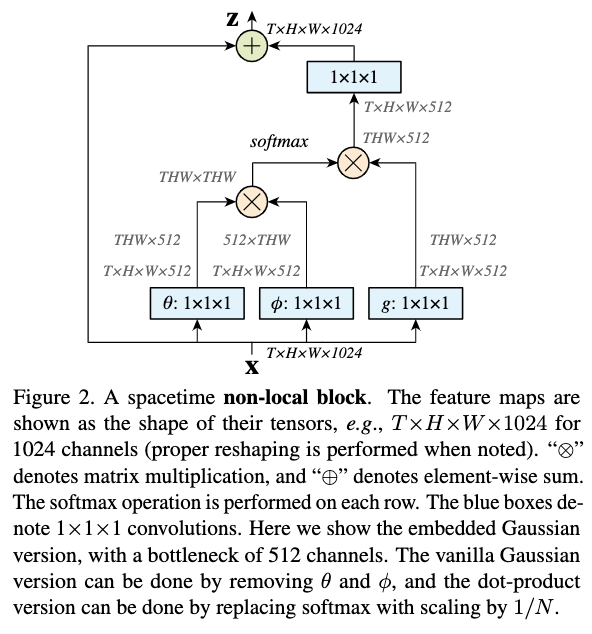
non-local block的一种实现方式如图2所示,首先对 x x x进行3种不同的线性变换,然后按照公式1得到输出特征,再与原特征进行相加,基本上跟self-attention是一样的。
Experiment

各种对比实验,表2a为函数 f f f的实现对比,可以看到影响不是很大。

视频分类对比。

COCO上的分割、检测、关键点对比。
Conclusion
Non-local操作是早期self-attention在视觉任务上的尝试,核心在于依照相似度加权其它特征对当前特征进行增强,实现方式十分简洁,为后续的很多相关研究提供了参考。
如果本文对你有帮助,麻烦点个赞或在看呗~
更多内容请关注 微信公众号【晓飞的算法工程笔记】
















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









