







FSAF深入地分析FPN层在训练时的选择问题,以超简单的anchor-free分支形式嵌入原网络,几乎对速度没有影响,可更准确的选择最优的FPN层,带来不错的精度提升
来源:晓飞的算法工程笔记 公众号
论文: Feature Selective Anchor-Free Module for Single-Shot Object Detection
Introduction
目标检测的首要问题就是尺寸变化,许多算法使用FPN以及anchor box来解决此问题。在正样本判断上面,一般先根据目标的尺寸决定预测用的FPN层,越大的目标则使用更高的FPN层,然后根据目标与anchor box的IoU进一步判断,但这样的设计会带来两个限制:拍脑袋式的特征选择以及基于IoU的anchor采样。
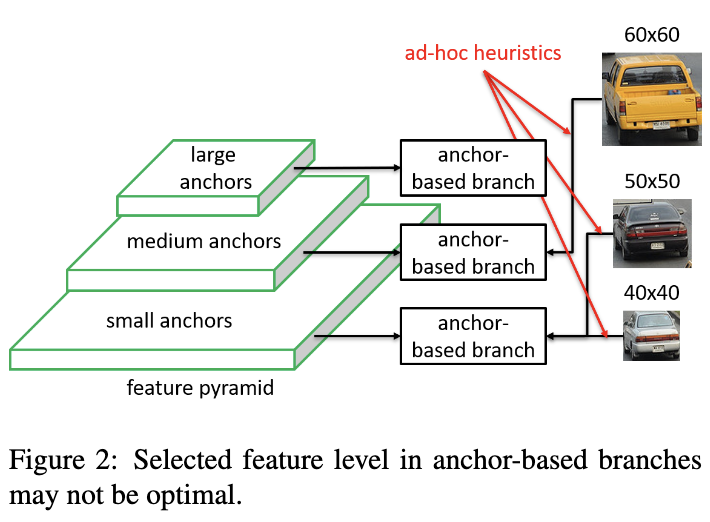
如图2所示,60x60选择中间的anchor,而50x50以及40x40的则选择最小的anchor,anchor的选择都是人们根据经验制定的规则,这在某些场景下可能不是最优的选择。
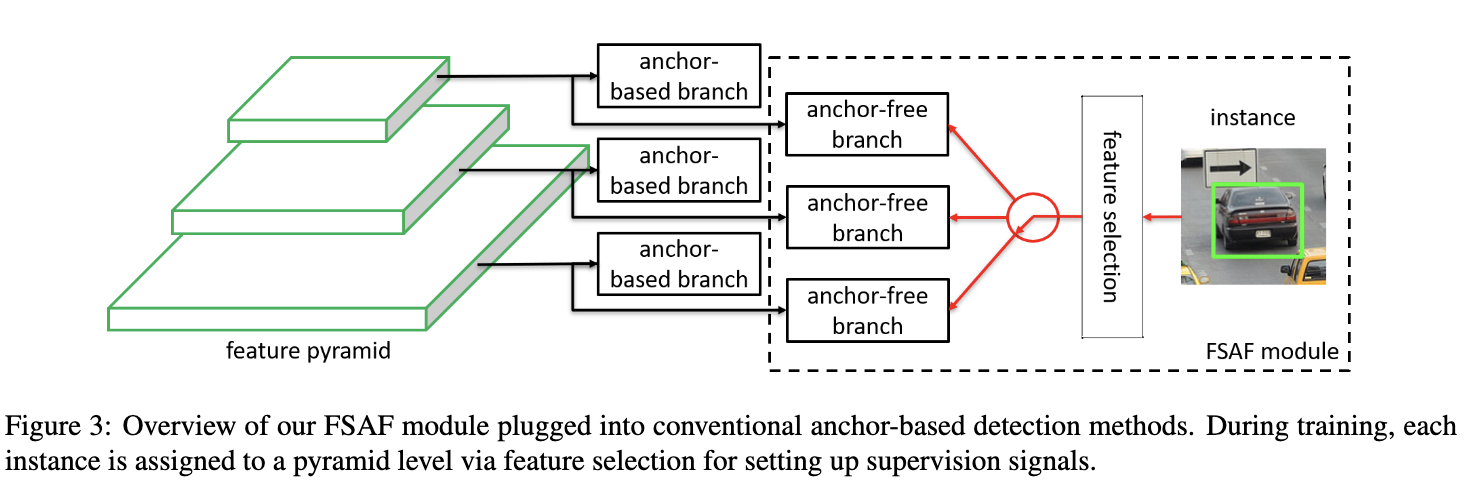
为了解决上述的问题,论文提出了简单且高效的特征选择方法FSAF(feature selective anchor-free),能够在每轮训练中选择最优的层进行优化。如图3所示,FSAF为FPN每层添加anchor-free分支,包含分类与回归,在训练时,根据anchor-free分支的预测结果选择最合适的FPN层用于训练,最终的网络输出可同时综合FSAF的anchor-free分支结果以及原网络的预测结果。
Network Architecture
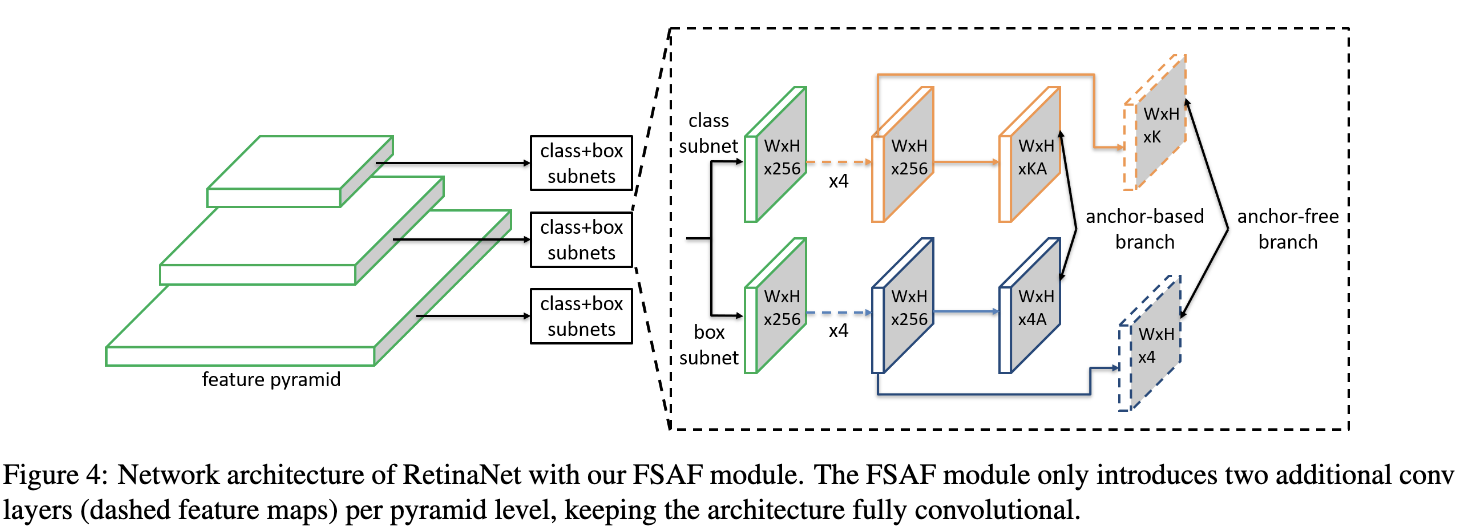
FSAF的网络结果非常简单,如图4所示。在原有的网络结构上,FSAF为FPN每层引入两个额外的卷积层,分别用于预测anchor-free的分类以及回归结果。这样,在共用特征的情况下,anchor-free和anchor-based的方法可进行联合预测。
Ground-truth and Loss
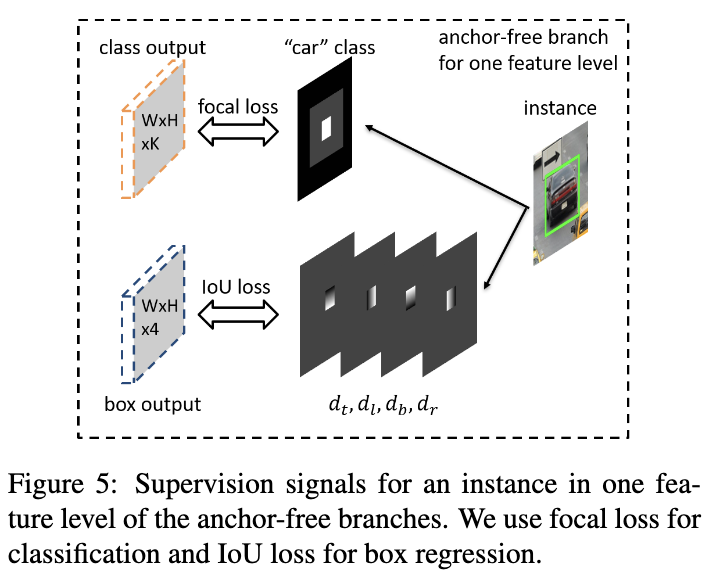
对于目标 b = [ x , y , w , h ] b=[x,y,w,h] b=[x,y,w,h],在训练时可映射到任意的FPN层 P l P_l Pl,映射区域为 b p l = [ x p l , y p l , w p l , h p l ] b^l_p=[x^l_p, y^l_p, w^l_p, h^l_p] bpl=[xpl,ypl,wpl,hpl]。一般而言, b p l = b / 2 l b^l_p=b/2^l bpl=b/2l。定义有效边界 b e l = [ x e l , y e l , w e l , h e l ] b^l_e=[x^l_e, y^l_e, w^l_e, h^l_e] bel=[xel,yel,wel,hel]和忽略边界 b i l = [ x i l , y i l , w i l , h i l ] b^l_i=[x^l_i, y^l_i, w^l_i, h^l_i] bil=[xil,yil,wil,hil],可用于定义特征图中的正样本区域、忽略区域以及负样本区域。有效边界和忽略边界均与映射结果成等比关系,比例分别为 ϵ e = 0.2 \epsilon_e=0.2 ϵe=0.2和 ϵ i = 0.5 \epsilon_i=0.5 ϵi=0.5,最终的分类损失为所有正负样本的损失值之和除以正样本点数。
Classification Output
分类结果包含 K K K维,目标主要设定对应维度,样本定义分以下3种情况:
- 有效边界内的区域为正样本点。
- 忽略边界到有效边界的区域不参与训练。
- 忽略边界映射到相邻的特征金字塔层中,映射的边界内的区域不参与训练
- 其余区域为负样本点。
分类的训练采用focal loss, α = 0.25 \alpha=0.25 α=0.25, γ = 2.0 \gamma=2.0 γ=2.0,完整的分类损失取所有正负区域的损失值之和除以有效区域点数。
Box Regression Output
回归结果输出为分类无关的4个偏移值维度,仅回归有效区域内的点。对于有效区域位置 ( i , j ) (i,j) (i,j),将映射目标表示为 d i , j l = [ d t i , j l , d l i , j l , d b i , j l , d r i , j l ] d^l_{i,j}=[d^l_{t_{i,j}}, d^l_{l_{i,j}}, d^l_{b_{i,j}}, d^l_{r_{i,j}}] di,jl=[dti,jl,dli,jl,dbi,jl,dri,jl],分别为当前位置到 b p l b^l_p bpl的边界的距离,对应的该位置上的4维向量为 d i , j l / S d^l_{i,j}/S di,jl/S, S = 4.0 S=4.0 S=4.0为归一化常量。回归的训练采用IoU损失,完整的anchor-free分支的损失取所有有效区域的损失值的均值。
Online Feature Selection
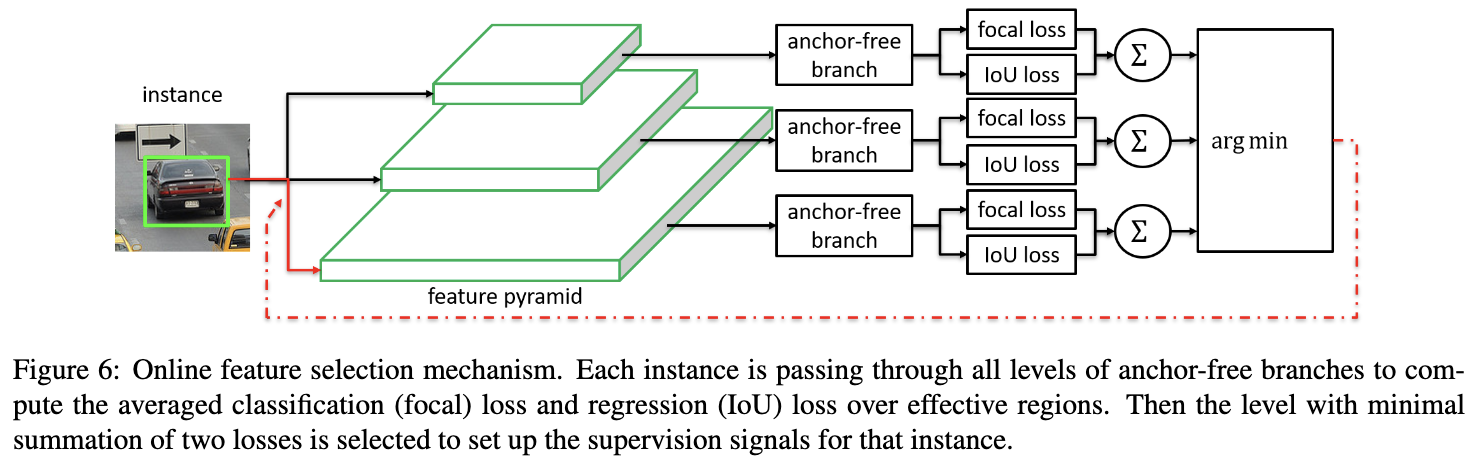
anchor-free的设计允许我们使用任意的FPN层 P l P_l Pl进行训练,为了找到最优的FPN层,FSAF模块需要计算FPN每层对目标的预测效果。对于分类与回归,分别计算各层有效区域的focal loss损失以及IoU loss损失:
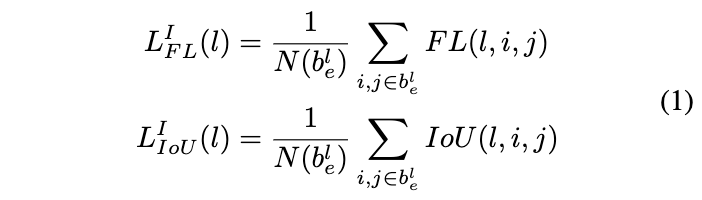
在得到各层的结果后,取损失值最小的层作为当轮训练的FPN层:

Joint Inference and Training
Inference
由于FSAF对原网络的改动很少,在推理时,稍微过滤下anchor-free和anchor-based分支的结果,然后合并进行NMS。
Optimization
完整的损失函数综合anchor-based分支以及anchor-free分支, L = L a b + λ ( L a f c l s + L a f r e g ) L=L^{ab}+\lambda(L^{af_{cls}}+L^{af_{reg}}) L=Lab+λ(Lafcls+Lafreg)
Experiments

各种结构以及FPN层选择方法的对比实验。

精度与推理速度对比。
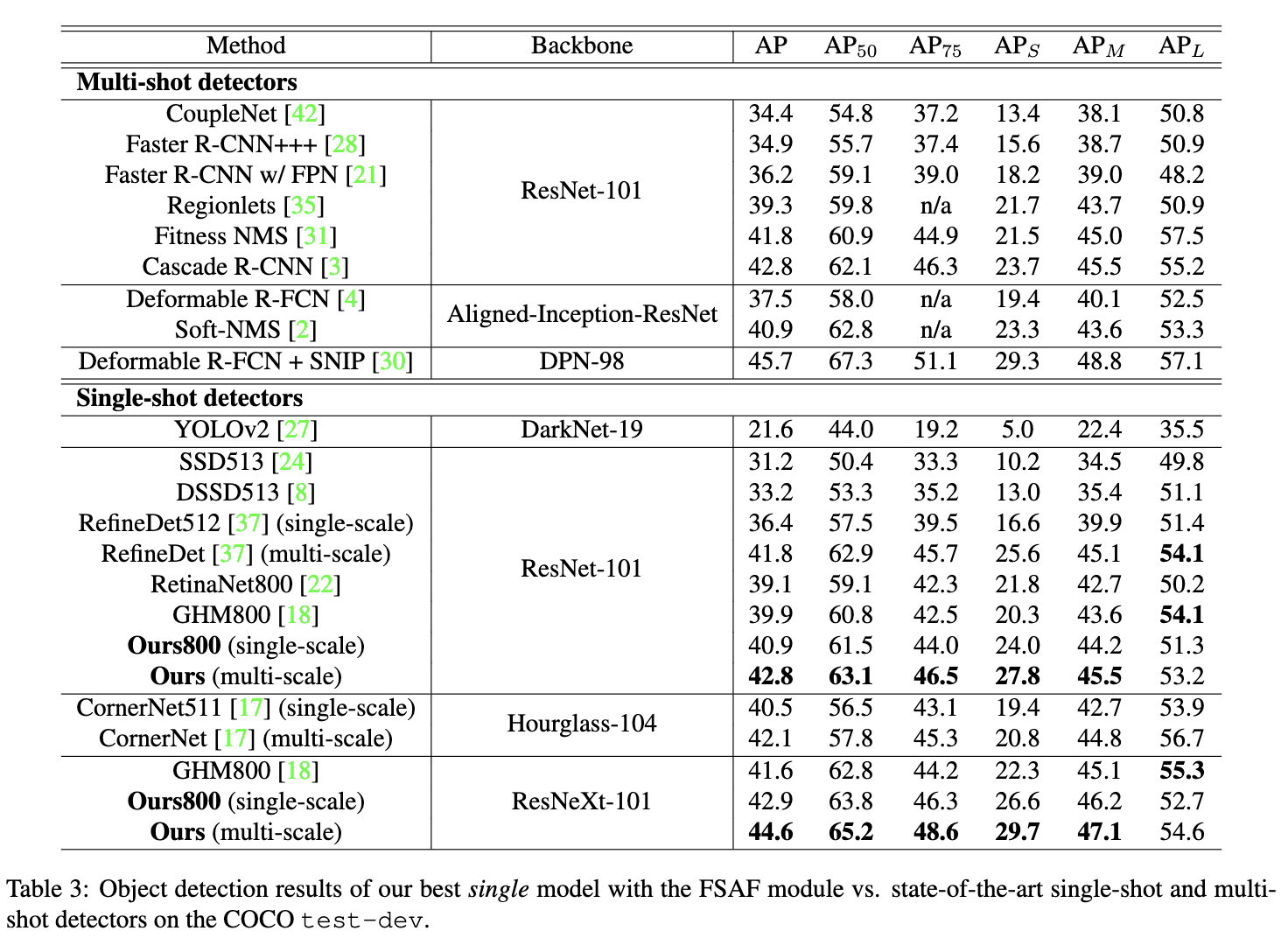
与SOTA方法对比。
Conclusion
FSAF深入地分析FPN层在训练时的选择问题,以超简单的anchor-free分支形式嵌入原网络,几乎对速度没有影响,可更准确的选择最优的FPN层,带来不错的精度提升。需要注意的是,虽然抛弃以往硬性的选择方法,但实际上依然存在一些人为的设定,比如有效区域的定义,所以该方法还不是最完美的。
如果本文对你有帮助,麻烦点个赞或在看呗~
更多内容请关注 微信公众号【晓飞的算法工程笔记】
















 317
317











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









