




 本文深入探讨了如何利用PCL库实现点云之间的匹配过程,包括关键点识别、特征描述、对应关系估计、匹配流程及最终的变换估计等核心环节。详细解释了双对应算法的工作原理和步骤,提供了在复杂点云数据处理中的实用解决方案。
本文深入探讨了如何利用PCL库实现点云之间的匹配过程,包括关键点识别、特征描述、对应关系估计、匹配流程及最终的变换估计等核心环节。详细解释了双对应算法的工作原理和步骤,提供了在复杂点云数据处理中的实用解决方案。
PCL Registration API
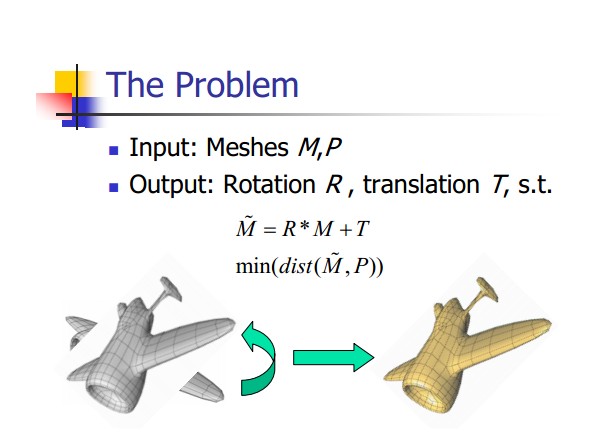
Registration:不断调整,把不同角度的3D点数据整合到一个完整的模型中。
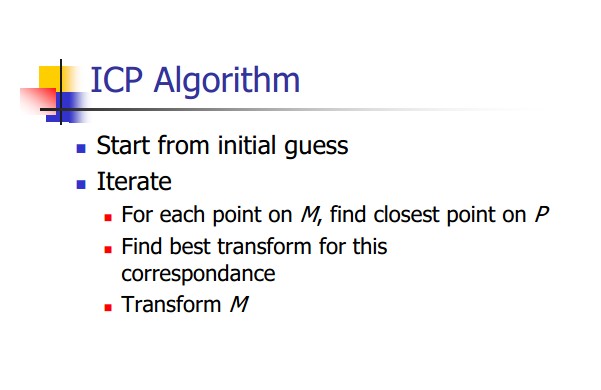
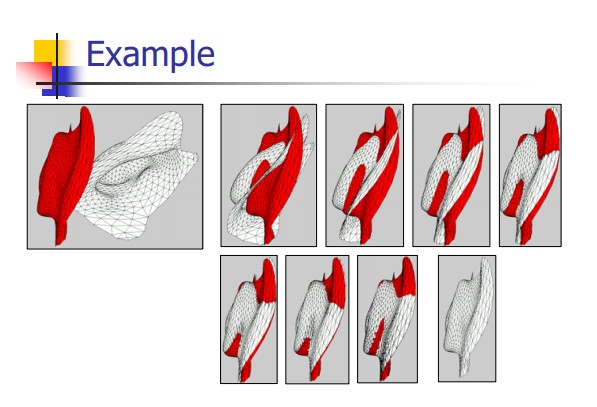
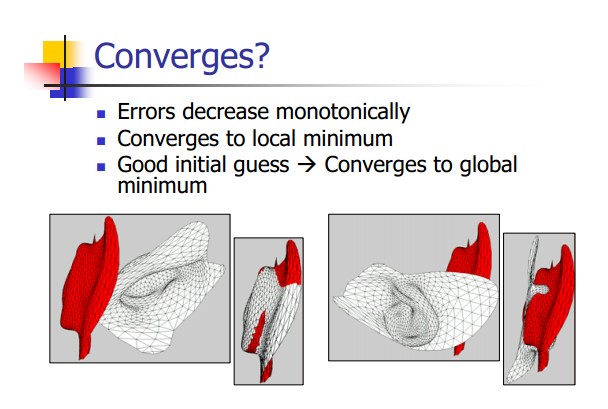
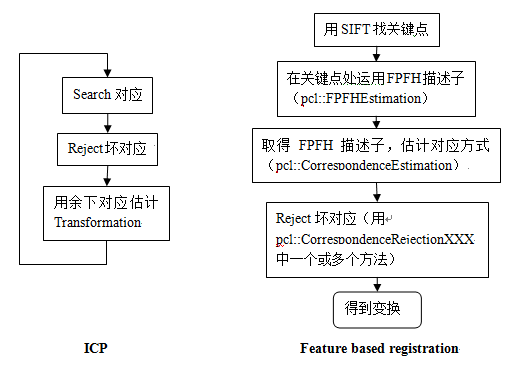
它的目的在于在一个全局坐标系下找到不同视角的定位与定向(两个视角交叉部分重叠完好为最优)。这就是KinectFusion论文中所提到的ICP( Iterative Closest Point )算法。给定输入数据集,首先做一个估计,然后通过旋转和平移变换一个数据集,找到一个正确的点集对应方式完美匹配。下面几页PPT是ICP很好的解释。
PCL提供了很多算法,多组点集对应估计,剔除坏对应,稳健的变换估计等。下面详细解释。
Pairwise registration
两个点集的对应,输出通常是一个4×4刚性变换矩阵:代表旋转和平移,它应用于源数据集,结果是完全与目标数据集匹配。下图是“双对应”算法中一次迭代的步骤:
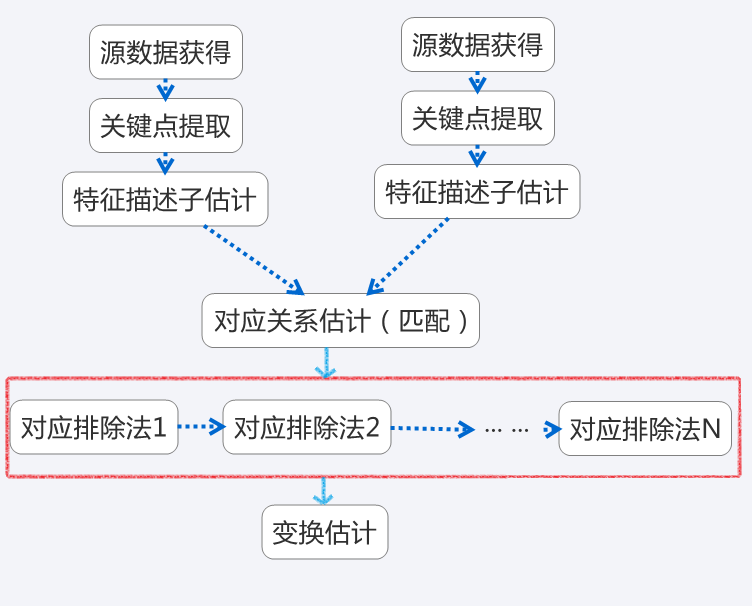
对两个数据源a,b匹配运算步骤如下:
- 从其中一个数据源a出发,分析其最能代表两个数据源场景共同点的关键点k
- 在每个关键点ki处,算出一个特征描述子fi
- 从这组特征描述子{fi}和他们在a和b中的XYZ坐标位置,基于fi和xyz的相似度,找出一组对应
- 由于实际数据源是有噪的,所以不是所有的对应都有效,这就需要一步一步排除对匹配起负作用的对应
- 从剩下的较好对应中,估计出一个变换
匹配过程中模块
Keypoints(关键点)
关键点是场景中有特殊性质的部分,一本书的边角,书上印的字母P都可以称作关键点。PCL中提供的关键点算法如NARF,SIFT,FAST。你可以选用所有点或者它的子集作为关键点,但需要考虑的是按毎帧有300k点来算,就有300k^2种对应组合。
Feature descriptors(特征描述子)
根据选取的关键点生成特征描述。把有用信息集合在向量里,进行比较。方法有:NARF, FPFH, BRIEF 或SIFT.
Correspondences estimation(对应关系估计)
已知从两个不同的扫描图中抽取的特征向量,找出相关特征,进而找出数据中重叠的部分。根据特征的类型,可以选用不同的方法。
点匹配(point matching, 用xyz坐标作为特征),无论数据有无重组,都有如下方法:
- brute force matching(强制匹配),
- kd-tree nearest neighbor search (FLANN)(kd树最近邻搜索),
- searching in the image space of organized data(在图像空间搜索有组织的数据),
- searching in the index space of organized data(按索引搜索有组织的数据).
特征匹配(feature matching, 用特征做为特征),只有下面两种方法:
- brute force matching (强制匹配)
- kd-tree nearest neighbor search (FLANN)(kd树最近邻搜索).
除了搜索法,还有两种著名对应估计:
- 直接估计对应关系(默认),对点云A中的每一点,搜索在B中的对应关系
- “Reciprocal” 相互对应关系估计,只用A,B重叠部分,先从A到B找对应,再从B到A找对应。
Correspondences rejection(剔除错误估计)
剔除错误估计,可用 RANSAC 算法,或减少数量,只用一部分对应关系。有一种特殊的一到多对应,即模型中一个点对应源中的一堆点。这种情况可以用最短路径对应或检查附近的其他匹配过滤掉。
Transformation estimation(最后一步,计算变换)
- 基于上述匹配评估错误测量值;
- 评估相机不同pose之间所作的刚性变换(运动估计),使错误测量值最小化;
- 优化点云结构;
- E.g, - SVD 运动估计; - Levenberg-Marquardt用不同内核作运动估计;
- 用刚性变换旋转/平移源数据到目标位置,可能需要对所有点/部分点/关键点内部运行ICP迭代循环;
- 迭代,直到满足某些收敛标准。
匹配流程总结

















 4749
4749

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









