







 本文详细介绍了RK809电源管理芯片的功能,包括DCDC和LDO电源特性,工作模式如normal、sleep和shutdown,以及上电条件和时序。此外,还阐述了如何配置芯片的驱动和DTS,包括i2c挂载、rtc、pwrkey、gpio和regulator部分。提供了关键接口如regulator_get、regulator_set_voltage等,供日常使用。
本文详细介绍了RK809电源管理芯片的功能,包括DCDC和LDO电源特性,工作模式如normal、sleep和shutdown,以及上电条件和时序。此外,还阐述了如何配置芯片的驱动和DTS,包括i2c挂载、rtc、pwrkey、gpio和regulator部分。提供了关键接口如regulator_get、regulator_set_voltage等,供日常使用。
1 基础
1.1 概述
-
RK809 是一款高性能 PMIC,RK809 集成 5 个大电流 DCDC、9 个 LDO、2 个 开关SWITCH、 1个 RTC、1个 高性能CODEC、可调上电时序等功能。 系统中各路电源总体分为两种:DCDC 和 LDO。两种电源的总体特性如下(详细资料请自行搜索):
- DCDC:输入输出压差大时,效率高,但是存在纹波比较大的问题,成本高,所以大压差,大电流 负载时使用。一般有两种工作模式。PWM 模式:纹波瞬态响应好,效率低;PFM 模式:效率高, 但是负载能力差。
- LDO:输入输出压差大时,效率低,成本低,为了提高 LDO 的转换效率,系统上会进行相关优化 如:LDO 输出电压为 1.1V,为了提高效率,其输入电压可以从 VCCIO_3.3V 的 DCDC 给出。所以 电路上如果允许尽量将 LDO 接到 DCDC 输出回路,但是要注意上电时序。
1.2 功能
-
从使用者的角度看,RK809 的功能概况起来可以分为 4 个部分:
-
regulator 功能:控制各路 DCDC、LDO 电源状态;
-
rtc 功能:提供时钟计时、定时等功能;
-
gpio 功能:可当普通 gpio 使用,有pinctrl的功能;
-
pwrkey 功能:检测 power 按键的按下/释放,可以为 AP 节省一个 gpio;
-
clk 功能:有两个32.768KHZ时钟输出,一个不可以控常开,一个是软件可控;
-
codec 功能:采样率最高支持到192KHZ,支持16bit和32bit,支持DAC、ADC PDM等(此功能暂 不在本文档中介绍,后面会有专有文档补充说明)。
-
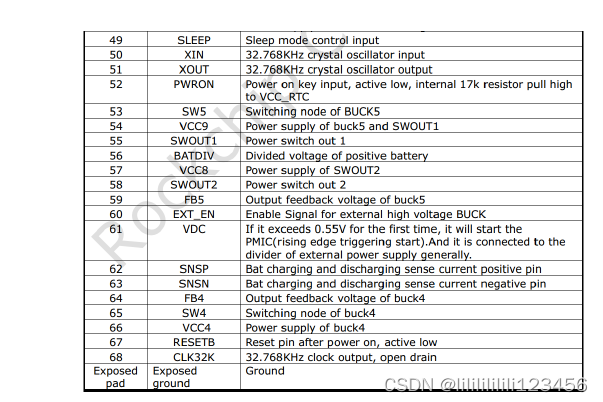
1.3 芯片引脚功能 在这里插入图片描述
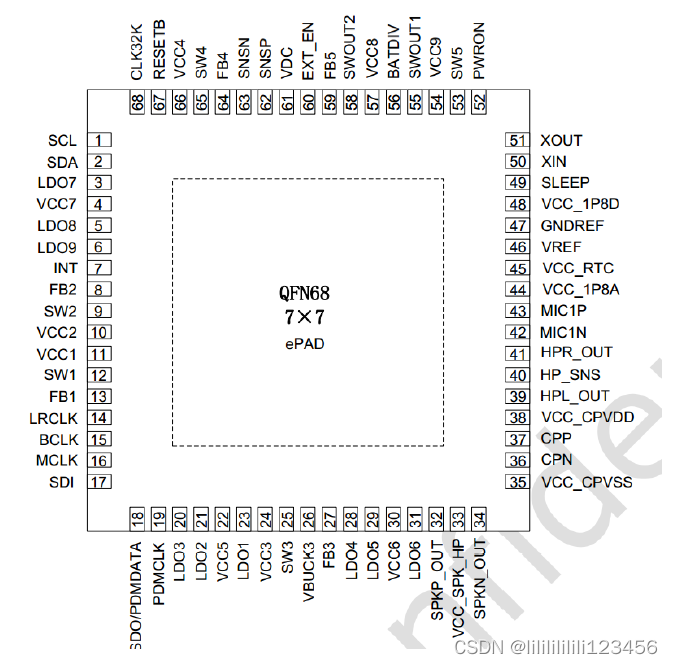
下面描述中,SLEEP 和 INT 引脚需要重点关注,而且具有扩展gpio功能的sleep脚: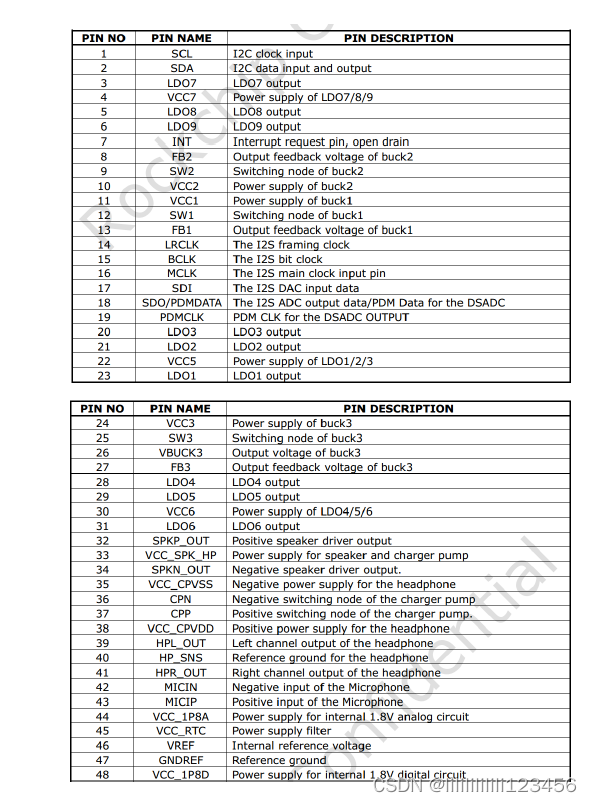
1.4 重要概念
I2C 地址 7 位从机地址:0x20
PMIC 有 3 种工作模式 -
PMIC normal 模式 系统正常运行时 PMIC 处于 normal 模式,此时 pmic_sleep 为低电平。
-
PMIC sleep 模式 系统休眠时需要待机功耗尽量低,PMIC 会切到 sleep 模式减低自身功耗,这时候一般会降低某些 路的输出电压,或者直接关闭输出,这可以根据实际产品需求进行配置。系统待机时 AP 通过 I2C 指令把 pmic_sleep 配置成 sleep 模式,然后拉高 pmic_sleep 即可让 PMIC 进入 sleep 状态;当 SoC 唤醒时 pmic_sleep 恢复为低电平,PMIC 退出休眠模式。
-
PMIC shutdown 模式 当系统进入关机流程的时候,PMIC 需要完成整个系统的电源下电操作。AP 通过 I2C 指令把 pmic_sleep 配置成 shutdown 模式,然后拉高 pmic_sleep 即可让 PMIC 进入 shutdown 状态。 pmic_sleep 引脚 常态为低电平,PMIC 处于 normal 模式。当引脚拉高的时候会切换到 sleep 或者 shutdown 的模 式。 RK809上这个脚是有复用功能的,可以通过pinctrl切换,选择需要的功能:
-
SLEEP功能,用于SLEEP模式切换;
-
关机功能,用于POWER DOWN;
-
复位功能,用于RESET;
-
空闲,没有作用; pmic_int 引脚 常态为高电平,当有中断产生的时候变为低电平。如果中断没有被处理,则会一直维持低电平。 pmic_pwron 引脚 pwrkey 的功能需要硬件上将 power 按键接到这个引脚,驱动通过这个引脚来判断按下/释放。 各路 DCDC 的工作模式 DCDC 有 PWM(也叫 force PWM)、PFM 模式,但是 PMIC 有一种模式会动态切换 PWM、 PFM,这就是我们通常所说的 AUTO 模式。PMIC 支持 PWM、AUTO PWM/PFM 两种模式, AUTO 模式效率高但是纹波瞬态响应会差。出于系统稳定性考虑,运行时都是设置为 PWM 模式, 系统进入休眠时会选择切换到 AUTO PWM/PFM。 DCDC3 电压调节 DCDC3 这路电源比较特殊,不能通过寄存器修改电压,只能通过外部电路的分压电阻进行调节, 所以如果需要修改电压请修改外围硬件,在 Rockchip 的方案上一般作为 VCC_DDR 使用。
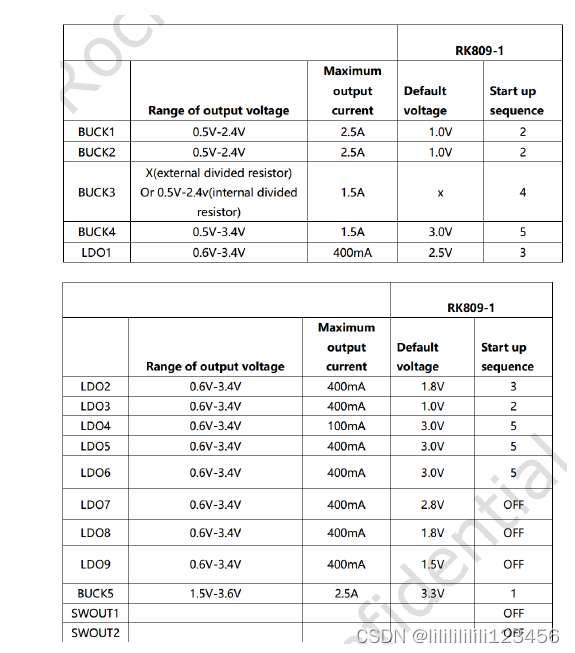
DCDC 和 LDO 的运行时电压调节范围
-
DCDC 电压范围不连续:
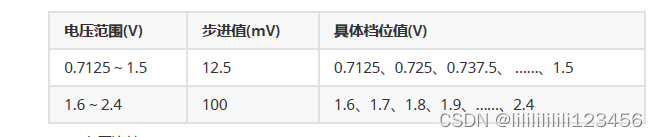
-
LDO 电压连续:

1.5 上电条件和时序 -
上电条件
只要满足下面任意一个条件即可以实现 PMIC 上电:
EN 信号从低电平变高电平触发
EN 信号保持高电平,且 RTC 闹钟中断触发
EN 信号保持高电平,按 PWRON 键触发
EN 信号保持高电平,充电器插入 -
上电时序
每款 SOC 平台对各路电源上电时序要求可能不一样,目前上电时序有如下情况,具体请参考最新
的 datasheet:
-
2 配置
2.1 驱动和 menuconfig
4.4 内核配置 RK809 驱动文件(跟rk817、rk805有复用部分)
drivers/mfd/rk808.c
drivers/input/misc/rk8xx-pwrkey.c
drivers/rtc/rtc-rk808.c
drivers/gpio/gpio-rk8xx.c
drivers/regulator/rk808-regulator.c
drivers/clk/clk-rk808.c
RK809 dts文件(可参考范例):
arch/arm64/boot/dts/rockchi/px30-evb-ddr4-v10.dts
menuconfig 里对应的宏配置:
CONFIG_MFD_RK808
CONFIG_RTC_RK808
CONFIG_GPIO_RK8XX
CONFIG_REGULATOR_RK818
CONFIG_INPUT_RK8XX_PWRKEY
CONFIG_COMMON_CLK_RK808
4.19 内核配置
RK809 驱动文件:
drivers/mfd/rk808.c
drivers/input/misc/rk805-pwrkey.c // 跟4.4内核不同
drivers/rtc/rtc-rk808.c
drivers/pinctrl/pinctrl-rk805.c // 跟4.4内核不同
drivers/regulator/rk808-regulator.c // 跟4.4内核不同
drivers/clk/clk-rk808.c
RK809 dts文件(可参考范例):
arch/arm64/boot/dts/rockchi/px30-evb-ddr4-v10.dts
menuconfig 里对应的宏配置:
CONFIG_MFD_RK808
CONFIG_RTC_RK808
CONFIG_PINCTRL_RK805
CONFIG_REGULATOR_RK808
CONFIG_INPUT_RK805_PWRKEY
CONFIG_COMMON_CLK_RK808
2.2 DTS 配置
4.4 内核 DTS 配置
DTS 的配置包括:i2c 挂载、主体、rtc、pwrkey、gpio、regulator 等部分。
&pinctrl {
pmic {
pmic_int: pmic_int {
rockchip,pins =
<0 RK_PA7 RK_FUNC_GPIO &pcfg_pull_up>;
};
soc_slppin_gpio: soc_slppin_gpio {
rockchip 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 2757
2757

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











