








 超级会员免费看
超级会员免费看

 本文探讨了激光雷达中为何不需要pile up校正算法,重点介绍了死区时间(dead time)的概念及其对dToF传感器的影响。优秀的传感器如IMX611和IMX459由于其低死区时间,使得pile up现象轻微,从而简化了校正需求。通过理解死区时间和测距直方图的形成,可以从器件层面深入理解激光雷达的工作原理。
本文探讨了激光雷达中为何不需要pile up校正算法,重点介绍了死区时间(dead time)的概念及其对dToF传感器的影响。优秀的传感器如IMX611和IMX459由于其低死区时间,使得pile up现象轻微,从而简化了校正需求。通过理解死区时间和测距直方图的形成,可以从器件层面深入理解激光雷达的工作原理。
上节在激光雷达多目标测距中有个问题为什么激光雷达不用做pile up算法,有人会有疑问,我看过很多人的简历,都把pile up量产校正算法写为最为自豪重要的算法攻坚,可能会吸引一波人的眼球。这要是在两三年前是值得被肯定的,但是如今随着dToF非常多量产项目落地,pile up研究不再那么神秘。
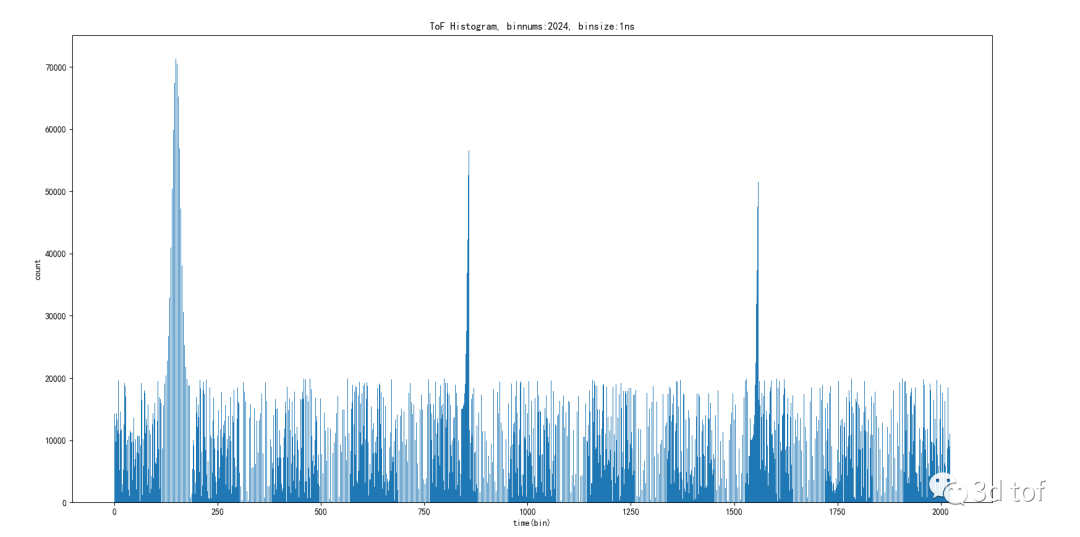
首先你得理解pile up是什么,然后在解释为什么激光雷达基本不需要pile up校正算法。Sensor层面决定了pile up的复杂程度,如果一个dToF的SPAD一致性非常好,那么pile up校正可以简单到极致,也就是一句代码的事,比如IMX611,优秀到不需要后端去考虑校正pile up。而在IMX459激光雷达中,都不需要考虑pile up。在了解pile up是什么的时候,我们需要知道一个器件参数叫dead time死区时间。
死区时间
死区时间是 TDC完成转换并准备好执行新的一次测量所需的时间,该指标体现了 TDC 可以运行的测量速率,现代应用都要求TDC能有较高的采样率,

 订阅专栏 解锁全文
订阅专栏 解锁全文




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











