







前言
最近花了点时间学习了下经典的VSLAM框架VINS,前后端都采用优化的方式,且在运行过程中实时估计IMU加速度计和陀螺仪bias,在初始化阶段还可以实时优化camera到IMU的外参,解决了很多之前SLAM框架在实际中使用的问题,例如使用时间久之后的外参漂移、IMU的bias不准导致的系统不够鲁棒等等,实测也具有非常良好的效果。但是VINS的代码确实不太友好,当然秦大佬只是用于发paper并不需要放过多心力在工程化上。已经有很多文章分析这份代码的细节了,这里主要针对VINS-Fusion代码主体的结构和流程做一些解析记录,便于日后的工程化和一些进一步优化工作。
代码剖析
Estimator是前端的一个核心类,整个系统的入口和核心处理逻辑都位于这个类中,其中通过inputIMU和inputImage将IMU数据和图像数据喂入,待进一步处理,整体逻辑如下:
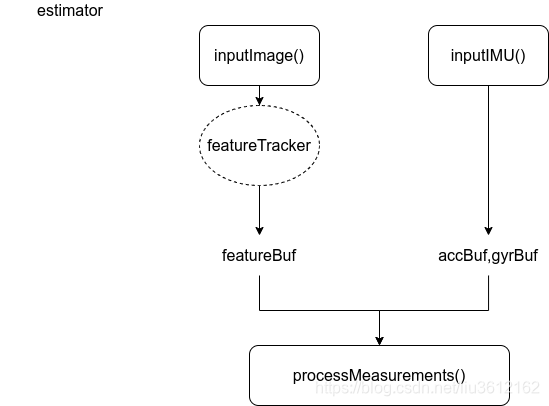
- 图像被喂入后马上进行了特征跟踪与提取,由featureTracker这个类负责,这个待会儿再谈;提取完特征后图像就被抛掉了,之后只需要用该帧图像的feature参与到之后的计算即可
- imu数据进入后也被存入buff中,待之后的使用
- processMeasurements()这个函数可以与数据接受部分解耦,因此VINS也提供了多线程开关,把这个函数单独放在一个线程中运行,避免其阻塞数据的读取。
先看看feature track部分:
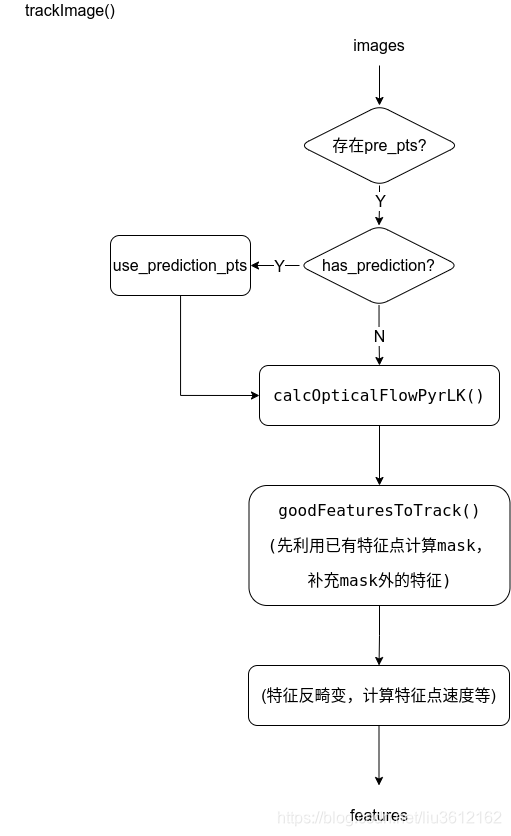
- 使用上一帧的feature结合光流法得到本帧的feature,这些feature被认为是追踪上了,在之后的triangulate中只有连续追踪到三帧以上的feature才会进行triangulate,这里如果有预测过程会使用预测的feature位置
- 判断通过光流得到的feature数量是否足够(feature数量可通过参数指定),不够则在已有feature的mask外补充feature
- 对所有feature进行反畸变和计算速度等,然后返回结果。
再看看processMeasurements()这个函数:
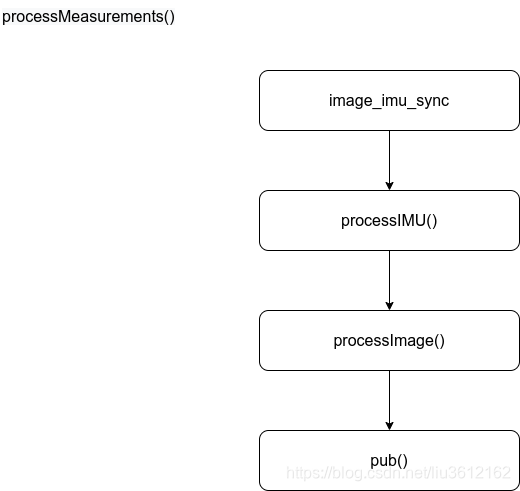
- 做图像与IMU数据的同步
- imu数据采用一个专用类IntergrationBase进行积分处理,这个类主要完成IMU数据积分得到RPY,并使用ESKF的思路在后续bias更新后同步更新一段时间内的RPY,细节可以参考Error-State Kalman Filter理解与公式推导
- 拿到同时刻的image feature和imu积分数据,然后进入processImage()这个函数,到这里就开始真正的计算了。
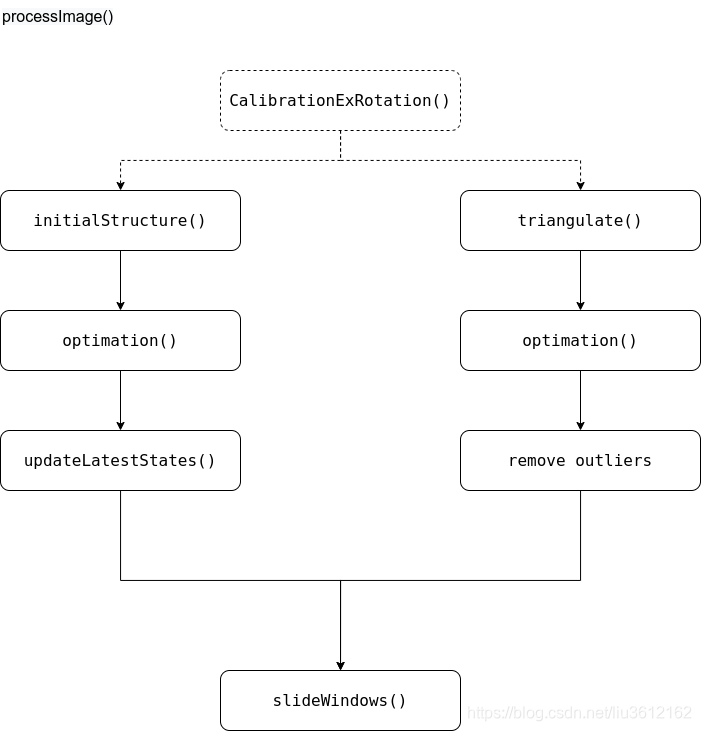
进入processImage()后首先会将所有feature送入feature manager管理起来,这个类的主要功能是根据feature的id把每个feature放入一个特定的buffer管理起来,用于保存这个feature与keyframe的关联序列,同时也可以完成traiangulate;然后如果参数有设置的话会估计一次camera到IMU的外参的旋转部分,这个过程只进行一次,也就是外参在线校准。之后可以看到有两条支线,对应initialization过程和vio过程,也对应vins-mono论文中的V和VI部分。
- initialization过程:首先initialStructure(),也就是采用SFM估算sliding window中的两个关键帧的pose并初步triangulate一些feature,再采用PnP得到所有帧的pose,对应论文中V中A部分,这里提一下,这个过程中如果运动不够(通过IMU速度判断),或者用于SFM的feature视差过小都会导致初始化失败;然后进入visualnitialAlign()部分,对应论文V中B和C部分,依次完成IMU陀螺仪bias校准,速度、重力和尺度初始化,以及重力值的优化,然后做一些位置更新、IMU使用新的bias和重力重新积分、以及位置更新到世界坐标系的操作;完成之后,更新sliding window中的所有状态,完成初始化。
- VIO过程:因为完成了初始化,因此直接对feature manager中管理的符合条件(连续跟踪三次以上)的feature进行triangulate,得到其深度,然后构建优化问题进行优化,得到最新的优化后的pose,对应论文中VI部分;之后将追踪上的feature对其在跟踪到的帧上依次进行重投影误差计算,得到误差大于一定阈值后将被抛掉,避免一些错误的feature引入噪声,这部分论文中没有;最后进行滑动窗口进行marginalization,对应论文中VI的D部分。
到此,前端处理的部分就结束了。
一些小细节
- 关于slidingwindow:
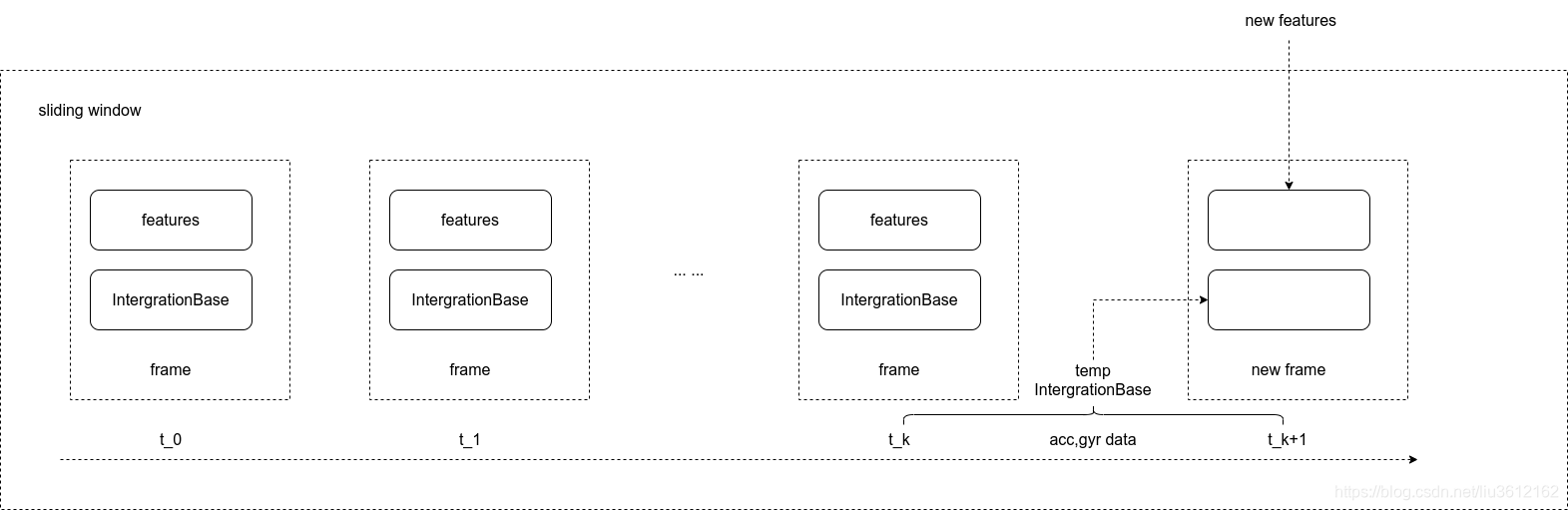
每帧都保留着从图像中追踪的feature和一个IntergrationBase,这个IntergrationBase存有从上一帧到这一帧的所有imu原始数据、bias、重力值以及积分结果,用以在优化和优化完成后使用新的bias重新积分使用。其内部使用了一些ESKF的思路,可以参考KF、EKF、ESKF的区别与联系中最后的部分。 - 有一个比较恶心的数据结构:map<int, vector<pair<int, Eigen::Matrix<double, 7, 1>>>>,其中数据的意义分别是:
int: feature id
int: camera id
7*1 matrix: 3d点x,y,z,2d点x,y(投影到相机sensor平面的坐标),2d点速度v_x,v_y















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









