







K-SVD算法
- 算法简介
- K-SVD可以看做K-means的一种泛化形式(由K-means扩展而来),K-means算法中每个信号量只能用一个原子来近似表示,而K-SVD中每个信号是用多个原子的线性组合来表示的。
- K-SVD通过构建字典来对数据进行稀疏表示,经常用于图像压缩、编码、分类等应用。
主要问题
其中 Y∈R(n∗N) , D∈R(n∗K) , X∈R(k∗N) , N 是样例数,
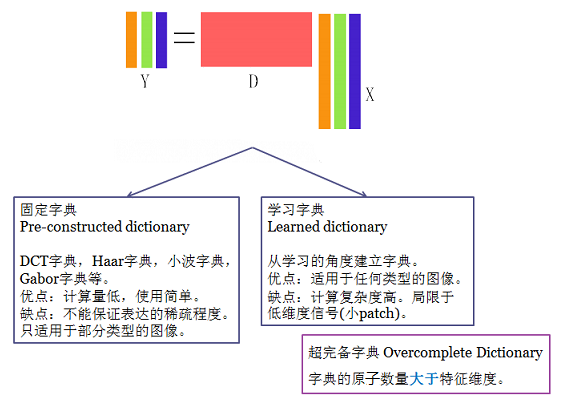
(其中第一个函数的意思是指求矩阵 Y−DX 的F范数即矩阵中所有元素的绝对值平方再开方)(第二个式子是求 xi 的0范数即计算向量之中非零元素的个数. 范数)上述式子的本质上是相通的, 只是表述形式上不一样. 由于寻找最优解(X最稀疏)是NP难的问题, 因此用追逐算法(Pursuit Algorithm)得到的次优解代替. (MP, OMP, BP, FOCUSS)
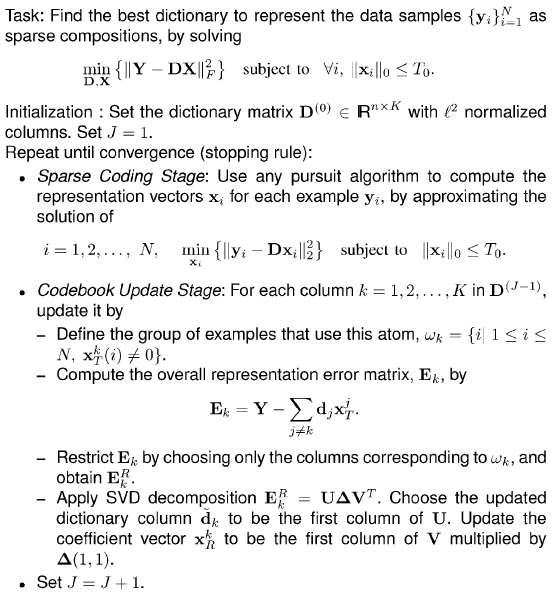
算法求解
给定训练数据后一次找到全局最优解的字典为NP难的问题, 只能逐步逼近最优解. 构造D算法分为两步: 稀疏表示和字典更新
稀疏表示
首先设定一个初始化的字典, 用该字典对给定数据进行稀疏表示(即用尽量少的系数尽可能近似的表示数据)得到系数矩阵
X
. 此时, 应该把
di 表示 D 的列,
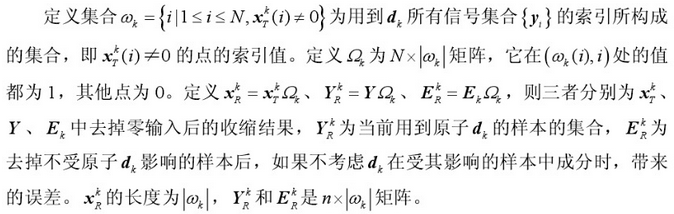
字典更新
初始字典往往不是最优的, 满足稀疏性的系数矩阵表示的数据和原数据会有较大误差, 我们需要在满足稀疏度的条件下逐行逐列更新优化, 减少整体误差, 逼近可用字典. 剥离字典中第
误差值为
上式可以看做把第 k 个基分量剥离后, 表达中产生空洞, 如何找到一个新基, 以更好地填补这个洞, 就是SVD方法的功能所在, 当误差值稳定的时候字典基本收敛.
求解流程
K-SVD是一个迭代的过程. 首先, 假设字典
字典D的更新是逐列进行的. 首先假设系数矩阵X和字典D都是固定的, 将要更新的是字典的第k列
dk
, 系数矩阵X中
dk
对应第k行为
xkT
, 则
得到当前误差矩阵 Ek 后, 我们只要调整 dk 和 xk , 使其乘积与 Ek 的误差尽可能小.
对于上面的问题, 如果直接用 Ek 的SVD分解结果来更新 dk 和 xk 则会导致 xk 不稀疏, 出现”发散”. 换句话说, xkT 中非零位置乘积后的那些项
. 形成 EkR , 将 EkR 做SVD分解, 更新 dk .
具体如下:
算法流程
参考:
1. http://blog.csdn.net/chlele0105/article/details/16886795
2. K-SVD: An algorithm fordesigning overcomplete dictionaries for sparse representation (IEEE Trans. OnSignal Processing 2006)
3. http://home.ustc.edu.cn/~zywvvd/files/K-SVD.pdf
4. http://blog.csdn.net/cc198877/article/details/9167989

















 1766
1766

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









