







Docker 是一款流行的容器化平台,可以用于构建、部署和运行容器化应用程序。在 Docker 中,Dockerfile 和 docker-compose.yml 是常用的两种配置文件,用于构建镜像和运行容器。
Dockerfile
Dockerfile 是一种用于定义 Docker 镜像的文本文件,包含了一系列的指令和参数,用于描述如何构建 Docker 镜像。通过编写 Dockerfile,可以定义镜像中的基础操作系统、应用程序、服务、环境变量、配置文件等等。
Dockerfile 是用于构建 Docker 镜像的工具。Docker 镜像是应用程序的打包和分发形式,其中包含了应用程序的代码、依赖项、配置文件等。 Dockerfile 是一个文本文件,其中包含了一系列的指令和参数,用于描述如何构建镜像,例如指定基础镜像、安装依赖项、复制文件等。通过运行 docker build 命令,可以根据 Dockerfile 构建出 Docker 镜像。Dockerfile 的位置通常是在应用程序代码仓库的根目录中。
Dockerfile 中包含了一系列的指令,每个指令代表一个构建步骤。这些指令包括:
| Dockerfile 指令 | 说明 |
|---|---|
| FROM | 指定基础镜像,用于后续的指令构建。 |
| MAINTAINER | 指定Dockerfile的作者/维护者。(已弃用,推荐使用LABEL指令) |
| LABEL | 添加镜像的元数据,使用键值对的形式。 |
| RUN | 在构建过程中在镜像中执行命令。 |
| CMD | 指定容器创建时的默认命令。(可以被覆盖) |
| ENTRYPOINT | 设置容器创建时的主要命令。(不可被覆盖) |
| EXPOSE | 声明容器运行时监听的特定网络端口。 |
| ENV | 在容器内部设置环境变量。 |
| ADD | 将文件、目录或远程URL复制到镜像中。 |
| COPY | 将文件或目录复制到镜像中。 |
| VOLUME | 为容器创建挂载点或声明卷。 |
| WORKDIR | 设置后续指令的工作目录。 |
| USER | 指定后续指令的用户上下文。 |
| ARG | 定义在构建过程中传递给构建器的变量,可使用 “docker build” 命令设置。 |
| ONBUILD | 当该镜像被用作另一个构建过程的基础时,添加触发器。 |
| STOPSIGNAL | 设置发送给容器以退出的系统调用信号。 |
| HEALTHCHECK | 定义周期性检查容器健康状态的命令。 |
| SHELL | 覆盖Docker中默认的shell,用于RUN、CMD和ENTRYPOINT指令。 |
通过 Dockerfile 中的这些指令,可以构建出一个完整的Docker 镜像。
COPY
复制指令,从上下文目录中复制文件或者目录到容器里指定路径。
格式:
COPY [--chown=<user>:<group>] <源路径1>... <目标路径>
COPY [--chown=<user>:<group>] ["<源路径1>",... "<目标路径>"]
[--chown=<user>:<group>]:可选参数,用户改变复制到容器内文件的拥有者和属组。
<源路径>:源文件或者源目录,这里可以是通配符表达式,其通配符规则要满足 Go 的 filepath.Match 规则。例如:
COPY hom* /mydir/
COPY hom?.txt /mydir/
<目标路径>:容器内的指定路径,该路径不用事先建好,路径不存在的话,会自动创建。
ADD
ADD 指令和 COPY 的使用格类似(同样需求下,官方推荐使用 COPY)。功能也类似,不同之处如下:
ADD 的优点:在执行 <源文件> 为 tar 压缩文件的话,压缩格式为 gzip, bzip2 以及 xz 的情况下,会自动复制并解压到 <目标路径>。
ADD 的缺点:在不解压的前提下,无法复制 tar 压缩文件。会令镜像构建缓存失效,从而可能会令镜像构建变得比较缓慢。具体是否使用,可以根据是否需要自动解压来决定。
CMD
类似于 RUN 指令,用于运行程序,但二者运行的时间点不同:
CMD 在docker run 时运行。
RUN 是在 docker build。
作用:为启动的容器指定默认要运行的程序,程序运行结束,容器也就结束。CMD 指令指定的程序可被 docker run 命令行参数中指定要运行的程序所覆盖。
注意:如果 Dockerfile 中如果存在多个 CMD 指令,仅最后一个生效。
格式:
CMD <shell 命令>
CMD ["<可执行文件或命令>","<param1>","<param2>",...]
CMD ["<param1>","<param2>",...] # 该写法是为 ENTRYPOINT 指令指定的程序提供默认参数
推荐使用第二种格式,执行过程比较明确。第一种格式实际上在运行的过程中也会自动转换成第二种格式运行,并且默认可执行文件是 sh。
ENTRYPOINT
类似于 CMD 指令,但其不会被 docker run 的命令行参数指定的指令所覆盖,而且这些命令行参数会被当作参数送给 ENTRYPOINT 指令指定的程序。
但是, 如果运行 docker run 时使用了 --entrypoint 选项,将覆盖 ENTRYPOINT 指令指定的程序。
优点:在执行 docker run 的时候可以指定 ENTRYPOINT 运行所需的参数。
注意:如果 Dockerfile 中如果存在多个 ENTRYPOINT 指令,仅最后一个生效。
ENTRYPOINT ["<executeable>","<param1>","<param2>",...]
可以搭配 CMD 命令使用:一般是变参才会使用 CMD ,这里的 CMD 等于是在给 ENTRYPOINT 传参,以下示例会提到。
示例:
假设已通过 Dockerfile 构建了 nginx:test 镜像:
FROM nginx
ENTRYPOINT ["nginx", "-c"] # 定参
CMD ["/etc/nginx/nginx.conf"] # 变参
1、不传参运行
$ docker run nginx:test
容器内会默认运行以下命令,启动主进程。
nginx -c /etc/nginx/nginx.conf
2、传参运行
$ docker run nginx:test -c /etc/nginx/new.conf
容器内会默认运行以下命令,启动主进程(/etc/nginx/new.conf:假设容器内已有此文件)
nginx -c /etc/nginx/new.conf
ENV
设置环境变量,定义了环境变量,那么在后续的指令中,就可以使用这个环境变量。
ENV <key> <value>
ENV <key1>=<value1> <key2>=<value2>...
以下示例设置 NODE_VERSION = 7.2.0 , 在后续的指令中可以通过 $NODE_VERSION 引用:
ENV NODE_VERSION 7.2.0
RUN curl -SLO "https://nodejs.org/dist/v$NODE_VERSION/node-v$NODE_VERSION-linux-x64.tar.xz" \
&& curl -SLO "https://nodejs.org/dist/v$NODE_VERSION/SHASUMS256.txt.asc"
ARG
构建参数,与 ENV 作用一致。不过作用域不一样。ARG 设置的环境变量仅对 Dockerfile 内有效,也就是说只有 docker build 的过程中有效,构建好的镜像内不存在此环境变量。
构建命令 docker build 中可以用 --build-arg <参数名>=<值> 来覆盖。
ARG <参数名>[=<默认值>]
VOLUME
定义匿名数据卷。在启动容器时忘记挂载数据卷,会自动挂载到匿名卷。
避免重要的数据,因容器重启而丢失,这是非常致命的。
避免容器不断变大。
格式:
VOLUME ["<路径1>", "<路径2>"...]
VOLUME <路径>
在启动容器 docker run 的时候,我们可以通过 -v 参数修改挂载点。
EXPOSE
仅仅只是声明端口。
帮助镜像使用者理解这个镜像服务的守护端口,以方便配置映射。
在运行时使用随机端口映射时,也就是 docker run -P 时,会自动随机映射 EXPOSE 的端口。
EXPOSE <端口1> [<端口2>...]
WORKDIR
指定工作目录。用 WORKDIR 指定的工作目录,会在构建镜像的每一层中都存在。以后各层的当前目录就被改为指定的目录,如该目录不存在,WORKDIR 会帮你建立目录。
docker build 构建镜像过程中的,每一个 RUN 命令都是新建的一层。只有通过 WORKDIR 创建的目录才会一直存在。
WORKDIR <工作目录路径>
USER
用于指定执行后续命令的用户和用户组,这边只是切换后续命令执行的用户(用户和用户组必须提前已经存在)。
USER <用户名>[:<用户组>]
HEALTHCHECK
用于指定某个程序或者指令来监控 docker 容器服务的运行状态。
HEALTHCHECK [选项] CMD <命令>:设置检查容器健康状况的命令
HEALTHCHECK NONE:如果基础镜像有健康检查指令,使用这行可以屏蔽掉其健康检查指令
HEALTHCHECK [选项] CMD <命令> : 这边 CMD 后面跟随的命令使用,可以参考 CMD 的用法。
ONBUILD
用于延迟构建命令的执行。简单的说,就是 Dockerfile 里用 ONBUILD 指定的命令,在本次构建镜像的过程中不会执行(假设镜像为 test-build)。当有新的 Dockerfile 使用了之前构建的镜像 FROM test-build ,这时执行新镜像的 Dockerfile 构建时候,会执行 test-build 的 Dockerfile 里的 ONBUILD 指定的命令。
ONBUILD <其它指令>
LABEL
LABEL 指令用来给镜像添加一些元数据(metadata),以键值对的形式,语法格式如下:
LABEL <key>=<value> <key>=<value> <key>=<value> ...
比如我们可以添加镜像的作者:
LABEL org.opencontainers.image.authors="runoob"
为什么需要 Dockerfile ?
Dockfile 可以解决镜像如下问题:
1、镜像透明性问题
通常情况下,我们下载镜像都是从 DockerHub 官方仓库拉取镜像,这些镜像都是安全可靠的。但是仓库中也有别人上传的镜像,可以说是完全的黑盒镜像了,镜像被植入了病毒都是有可能的。有了 Dockerfile 就很好的解决了这个问题, 通过它可以清楚的看到镜像每一层的构建指令,从而判断该镜像是否安全可靠。
2、镜像 layer 层无法复用问题
镜像是由一层层的 layer 叠加而成,通过 Dockerfile 构建镜像时,如果发现本地存在可以重复利用的 layer,就不会重复下载,这样可以节省存储空间。
举个例子更容易理解,比如你之前已经构建了一个基于 Centos 的,并在其上安装了 JDK 1.8 的镜像;后续,你又有了新的需求,想在之前的镜像基础上,再安装一个 Tomcat, 那么在通过 Dockfile 构建镜像时,前面的 Centos 和 JDK 1.8 层都是可以被复用的。
3、镜像维护与分享问题
通过 Dockerfile 构建、定制的镜像也更易于被维护与分享,如果需要新的定制,直接改 Dockerfile 重新构建就好了
构建镜像的命令为:
$ docker build -t <镜像名>:<标签> <Dockerfile所在目录>
dockerfile示例:
FROM centos
RUN yum -y install wget \
&& wget -O redis.tar.gz "http://download.redis.io/releases/redis-5.0.3.tar.gz" \
&& tar -xvf redis.tar.gz \
&& rm redis.tar.gz
构建镜像:
docker build -t nginx:test .
docker-compose.yml
docker-compose.yml 是 Docker Compose 的配置文件,用于定义和运行多个 Docker 容器。通过编写 docker-compose.yml,可以轻松地管理多个容器、配置它们之间的连接和依赖关系,并指定它们的配置选项。
docker-compose.yml 用于定义和管理 Docker 容器应用程序的工具。 Docker 容器是 Docker 镜像的运行实例,其中包含了应用程序的运行环境和配置。docker-compose.yml 文件中包含了多个服务的定义,每个服务定义了容器的镜像名称、容器名称、端口映射、环境变量等等。通过运行 docker-compose 命令,可以根据 docker-compose.yml 启动、停止、删除容器等操作。
docker-compose.yml 文件的基本结构如下:
version: '3'
services:
<服务名>:
image: <镜像名>:<标签>
volumes:
- <主机目录>:<容器目录>
ports:
- <主机端口>:<容器端口>
environment:
- <环境变量>
其中,version 表示 Docker Compose 文件的版本号,services 表示服务列表,每个服务有一个服务名和一个或多个配置项。常用的配置项包括:
image:指定容器所使用的镜像;
volumes:指定容器和主机之间的数据卷映射关系;
ports:指定容器暴露的端口和主机的端口映射关系; environment:指定容器所需的环境变量。
version
指定本 yml 依从的 compose 哪个版本制定的。
build
指定为构建镜像上下文路径:
例如 webapp 服务,指定为从上下文路径 ./dir/Dockerfile 所构建的镜像:
version: "3.7"
services:
webapp:
build: ./dir
或者,作为具有在上下文指定的路径的对象,以及可选的 Dockerfile 和 args:
version: "3.7"
services:
webapp:
build:
context: ./dir
dockerfile: Dockerfile-alternate
args:
buildno: 1
labels:
- "com.example.description=Accounting webapp"
- "com.example.department=Finance"
- "com.example.label-with-empty-value"
target: prod
- context:上下文路径。
- dockerfile:指定构建镜像的 Dockerfile 文件名。
- args:添加构建参数,这是只能在构建过程中访问的环境变量。
- labels:设置构建镜像的标签。
- target:多层构建,可以指定构建哪一层。
cap_add,cap_drop
添加或删除容器拥有的宿主机的内核功能。
cap_add:
- ALL # 开启全部权限
cap_drop:
- SYS_PTRACE # 关闭 ptrace权限
cgroup_parent
为容器指定父 cgroup 组,意味着将继承该组的资源限制。
cgroup_parent: m-executor-abcd
command
覆盖容器启动的默认命令。
command: ["bundle", "exec", "thin", "-p", "3000"]
container_name
指定自定义容器名称,而不是生成的默认名称。
container_name: my-web-container
depends_on
设置依赖关系。
docker-compose up :以依赖性顺序启动服务。在以下示例中,先启动 db 和 redis ,才会启动 web。
docker-compose up SERVICE :自动包含 SERVICE 的依赖项。在以下示例中,docker-compose up web 还将创建并启动 db 和 redis。
docker-compose stop :按依赖关系顺序停止服务。在以下示例中,web 在 db 和 redis 之前停止。
version: "3.7"
services:
web:
build: .
depends_on:
- db
- redis
redis:
image: redis
db:
image: postgres
注意:web 服务不会等待 redis db 完全启动 之后才启动。
deploy
指定与服务的部署和运行有关的配置。只在 swarm 模式下才会有用。
version: "3.7"
services:
redis:
image: redis:alpine
deploy:
mode:replicated
replicas: 6
endpoint_mode: dnsrr
labels:
description: "This redis service label"
resources:
limits:
cpus: '0.50'
memory: 50M
reservations:
cpus: '0.25'
memory: 20M
restart_policy:
condition: on-failure
delay: 5s
max_attempts: 3
window: 120s
可以选参数:
endpoint_mode:访问集群服务的方式。
endpoint_mode: vip
# Docker 集群服务一个对外的虚拟 ip。所有的请求都会通过这个虚拟 ip 到达集群服务内部的机器。
endpoint_mode: dnsrr
# DNS 轮询(DNSRR)。所有的请求会自动轮询获取到集群 ip 列表中的一个 ip 地址。
labels:在服务上设置标签。可以用容器上的 labels(跟 deploy 同级的配置) 覆盖 deploy 下的 labels。
mode:指定服务提供的模式。
replicated:复制服务,复制指定服务到集群的机器上。
global:全局服务,服务将部署至集群的每个节点。
图解:下图中黄色的方块是 replicated 模式的运行情况,灰色方块是 global 模式的运行情况。
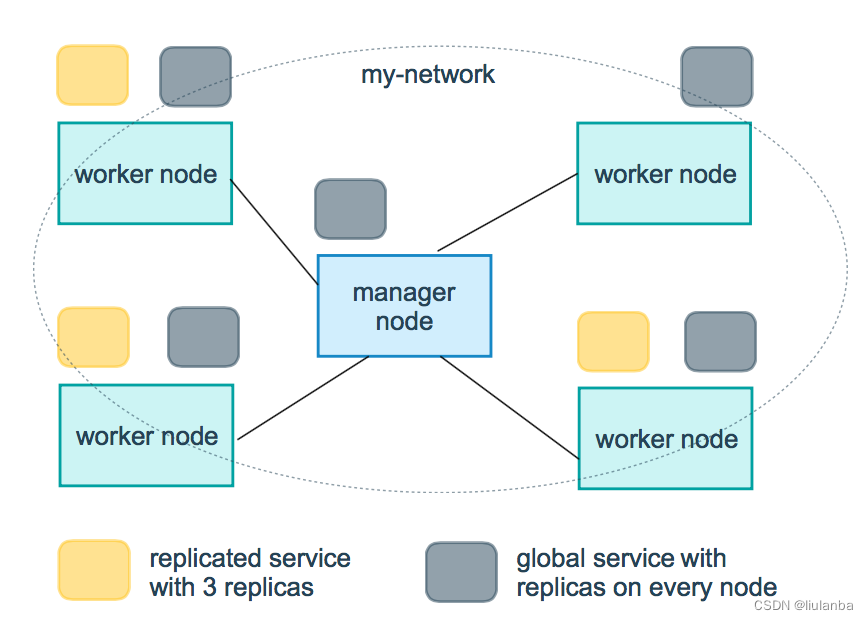
replicas:mode 为 replicated 时,需要使用此参数配置具体运行的节点数量。
resources:配置服务器资源使用的限制,例如上例子,配置 redis 集群运行需要的 cpu 的百分比 和 内存的占用。避免占用资源过高出现异常。
restart_policy:配置如何在退出容器时重新启动容器。
condition:可选 none,on-failure 或者 any(默认值:any)。
delay:设置多久之后重启(默认值:0)。
max_attempts:尝试重新启动容器的次数,超出次数,则不再尝试(默认值:一直重试)。
window:设置容器重启超时时间(默认值:0)。
rollback_config:配置在更新失败的情况下应如何回滚服务。
parallelism:一次要回滚的容器数。如果设置为0,则所有容器将同时回滚。
delay:每个容器组回滚之间等待的时间(默认为0s)。
failure_action:如果回滚失败,该怎么办。其中一个 continue 或者 pause(默认pause)。
monitor:每个容器更新后,持续观察是否失败了的时间 (ns|us|ms|s|m|h)(默认为0s)。
max_failure_ratio:在回滚期间可以容忍的故障率(默认为0)。
order:回滚期间的操作顺序。其中一个 stop-first(串行回滚),或者 start-first(并行回滚)(默认 stop-first )。
update_config:配置应如何更新服务,对于配置滚动更新很有用。
parallelism:一次更新的容器数。
delay:在更新一组容器之间等待的时间。
failure_action:如果更新失败,该怎么办。其中一个 continue,rollback 或者pause (默认:pause)。
monitor:每个容器更新后,持续观察是否失败了的时间 (ns|us|ms|s|m|h)(默认为0s)。
max_failure_ratio:在更新过程中可以容忍的故障率。
order:回滚期间的操作顺序。其中一个 stop-first(串行回滚),或者 start-first(并行回滚)(默认stop-first)。
注:仅支持 V3.4 及更高版本。
devices
指定设备映射列表。
devices:
- "/dev/ttyUSB0:/dev/ttyUSB0"
dns
自定义 DNS 服务器,可以是单个值或列表的多个值。
dns: 8.8.8.8
dns:
- 8.8.8.8
- 9.9.9.9
dns_search
自定义 DNS 搜索域。可以是单个值或列表。
dns_search: example.com
dns_search:
- dc1.example.com
- dc2.example.com
entrypoint
覆盖容器默认的 entrypoint。
entrypoint: /code/entrypoint.sh
也可以是以下格式:
entrypoint:
- php
- -d
- zend_extension=/usr/local/lib/php/extensions/no-debug-non-zts-20100525/xdebug.so
- -d
- memory_limit=-1
- vendor/bin/phpunit
env_file
从文件添加环境变量。可以是单个值或列表的多个值。
env_file: .env
也可以是列表格式:
env_file:
- ./common.env
- ./apps/web.env
- /opt/secrets.env
environment
添加环境变量。您可以使用数组或字典、任何布尔值,布尔值需要用引号引起来,以确保 YML 解析器不会将其转换为 True 或 False。
environment:
RACK_ENV: development
SHOW: 'true'
expose
暴露端口,但不映射到宿主机,只被连接的服务访问。
仅可以指定内部端口为参数:
expose:
- "3000"
- "8000"
extra_hosts
添加主机名映射。类似 docker client --add-host。
extra_hosts:
- "somehost:162.242.195.82"
- "otherhost:50.31.209.229"
以上会在此服务的内部容器中 /etc/hosts 创建一个具有 ip 地址和主机名的映射关系:
162.242.195.82 somehost
50.31.209.229 otherhost
healthcheck
用于检测 docker 服务是否健康运行。
healthcheck:
test: ["CMD", "curl", "-f", "http://localhost"] # 设置检测程序
interval: 1m30s # 设置检测间隔
timeout: 10s # 设置检测超时时间
retries: 3 # 设置重试次数
start_period: 40s # 启动后,多少秒开始启动检测程序
image
指定容器运行的镜像。以下格式都可以:
image: redis
image: ubuntu:14.04
image: tutum/influxdb
image: example-registry.com:4000/postgresql
image: a4bc65fd # 镜像id
logging
服务的日志记录配置。
driver:指定服务容器的日志记录驱动程序,默认值为json-file。有以下三个选项
driver: "json-file"
driver: "syslog"
driver: "none"
仅在 json-file 驱动程序下,可以使用以下参数,限制日志得数量和大小。
logging:
driver: json-file
options:
max-size: "200k" # 单个文件大小为200k
max-file: "10" # 最多10个文件
当达到文件限制上限,会自动删除旧得文件。
syslog 驱动程序下,可以使用 syslog-address 指定日志接收地址。
logging:
driver: syslog
options:
syslog-address: "tcp://192.168.0.42:123"
network_mode
设置网络模式。
network_mode: "bridge"
network_mode: "host"
network_mode: "none"
network_mode: "service:[service name]"
network_mode: "container:[container name/id]"
networks
配置容器连接的网络,引用顶级 networks 下的条目 。
services:
some-service:
networks:
some-network:
aliases:
- alias1
other-network:
aliases:
- alias2
networks:
some-network:
# Use a custom driver
driver: custom-driver-1
other-network:
# Use a custom driver which takes special options
driver: custom-driver-2
aliases :同一网络上的其他容器可以使用服务名称或此别名来连接到对应容器的服务。
restart
no:是默认的重启策略,在任何情况下都不会重启容器。
always:容器总是重新启动。
on-failure:在容器非正常退出时(退出状态非0),才会重启容器。
unless-stopped:在容器退出时总是重启容器,但是不考虑在Docker守护进程启动时就已经停止了的容器
restart: "no"
restart: always
restart: on-failure
restart: unless-stopped
注:swarm 集群模式,请改用 restart_policy。
secrets
存储敏感数据,例如密码:
version: "3.1"
services:
mysql:
image: mysql
environment:
MYSQL_ROOT_PASSWORD_FILE: /run/secrets/my_secret
secrets:
- my_secret
secrets:
my_secret:
file: ./my_secret.txt
security_opt
修改容器默认的 schema 标签。
security-opt:
- label:user:USER # 设置容器的用户标签
- label:role:ROLE # 设置容器的角色标签
- label:type:TYPE # 设置容器的安全策略标签
- label:level:LEVEL # 设置容器的安全等级标签
stop_grace_period
指定在容器无法处理 SIGTERM (或者任何 stop_signal 的信号),等待多久后发送 SIGKILL 信号关闭容器。
stop_grace_period: 1s # 等待 1 秒
stop_grace_period: 1m30s # 等待 1 分 30 秒
默认的等待时间是 10 秒。
stop_signal
设置停止容器的替代信号。默认情况下使用 SIGTERM 。
以下示例,使用 SIGUSR1 替代信号 SIGTERM 来停止容器。
stop_signal: SIGUSR1
sysctls
设置容器中的内核参数,可以使用数组或字典格式。
sysctls:
net.core.somaxconn: 1024
net.ipv4.tcp_syncookies: 0
sysctls:
- net.core.somaxconn=1024
- net.ipv4.tcp_syncookies=0
tmpfs
在容器内安装一个临时文件系统。可以是单个值或列表的多个值。
tmpfs: /run
tmpfs:
- /run
- /tmp
ulimits
覆盖容器默认的 ulimit。
ulimits:
nproc: 65535
nofile:
soft: 20000
hard: 40000
volumes
将主机的数据卷或着文件挂载到容器里。
version: "3.7"
services:
db:
image: postgres:latest
volumes:
- "/localhost/postgres.sock:/var/run/postgres/postgres.sock"
- "/localhost/data:/var/lib/postgresql/data"
通过 docker-compose.yml 文件,可以使用 docker-compose up 命令来启动所有服务。这个命令会根据 docker-compose.yml 文件中的定义,创建并启动所有的容器。
总之,Dockerfile 和 docker-compose.yml 是 Docker 中常用的两种配置文件,分别用于构建镜像和管理容器。通过使用这两种文件,可以轻松地构建和管理容器化应用程序。Dockerfile 和 docker-compose.yml 文件的优势如下:
Dockerfile 可以通过一系列指令,将应用程序和所需的环境封装在一个镜像中,从而实现应用程序的可移植性和可重复性。
Docker Compose 可以通过一个配置文件,轻松地管理多个容器,实现容器之间的通信和数据共享,从而实现应用程序的可扩展性和高可用性。
总的来说,Dockerfile 和 docker-compose.yml 是 Docker 平台的两个核心配置文件,是容器化应用程序的构建和部署的重要工具。掌握了这两种配置文件的使用方法,可以让我们更加高效地开发、测试和部署容器化应用程序。通常先使用 Dockerfile 构建出 Docker 镜像,然后使用 docker-compose.yml 启动容器。
参考:https://www.cnblogs.com/crazymakercircle/p/15505199.html

















 2081
2081

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









