




rvctools工具箱资源地址分享:
链接:https://pan.baidu.com/s/1DqeCwS0F-P2DgQJQeL9boA
提取码:lmgp
首先找到你的Matlab安装位置,找到toolbox文件夹,例如我的位置是D:\Program Files\Matlab\toolbox,将下载的压缩包解压至toolbox文件夹下,如下图所示:

然后打开你的Matlab,选择“主页”,点击“设置路径”,然后点击“添加并包含子文件夹”,再找到并选择“rvctools”文件夹,如下图:

再点击“保存”,“关闭”退出。

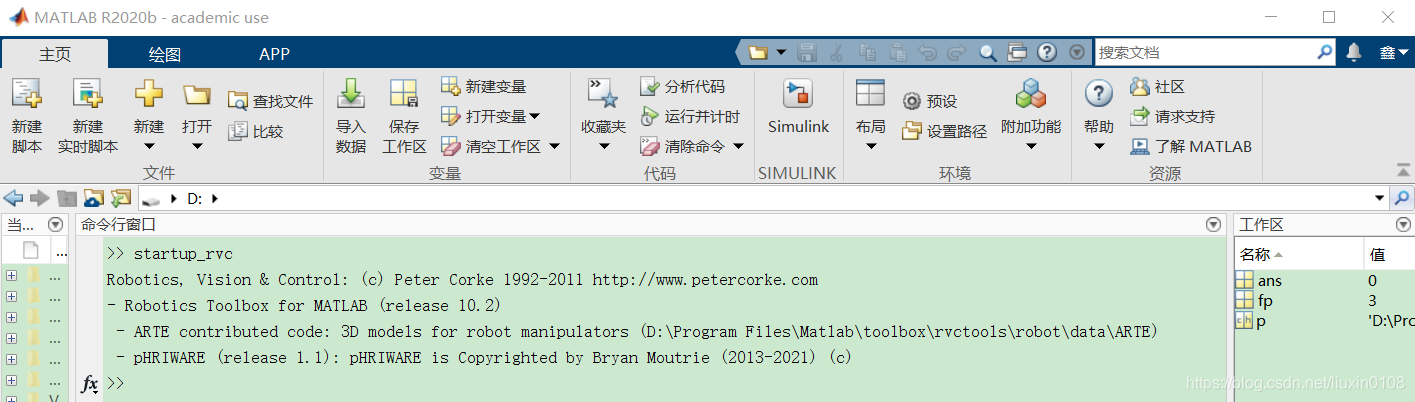
最后,在Matlab的命令行窗口下运行下面的命令:
startup_rvc如下图:
继续输入:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 2193
2193

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









