







电机控制经常使用的PID控制方式有位置式PID控制和增量式PID控制两种方式。位置式PID是一种可以直接控制执行机构的非递推算法,u(k)值与执行机构的实际位置一一对应,因此可以很好地应用于执行机构没有积分部件的对象。每个输出都与过去的状态有关,并且在计算时是对e(k)进行累加,计算量工作比较大。下式为位置式PID:

采用PI控制器可以消除系统的稳态误差,加快系统的响应速度。
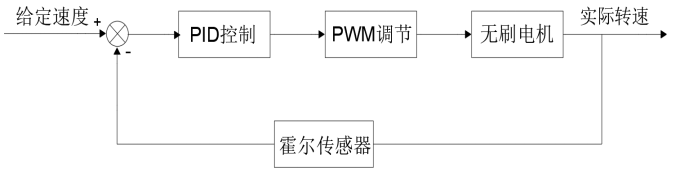
直流无刷电机转速闭环调速系统原理图如下:
代码生成主程序如下所示:
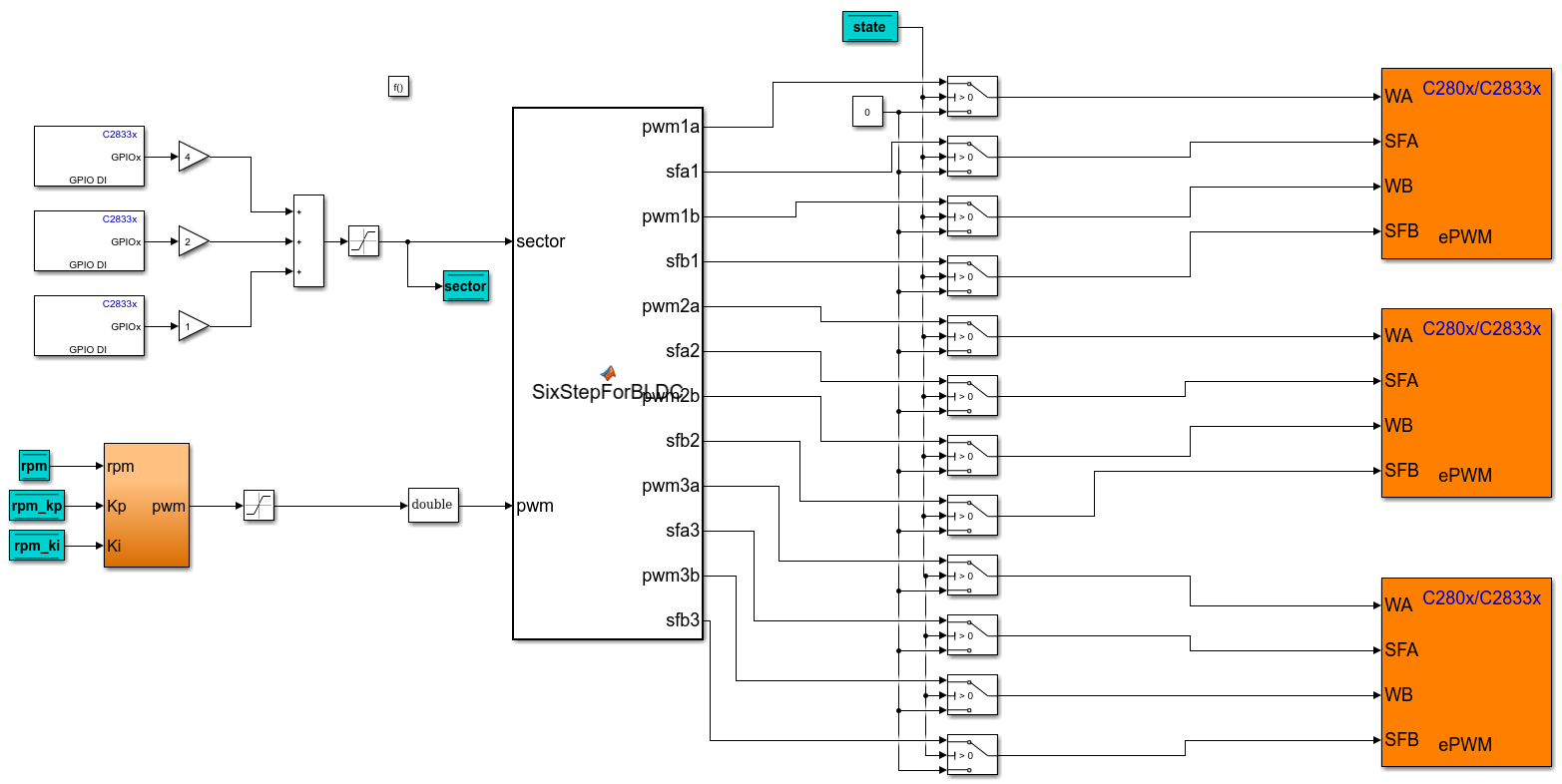
其中部分模块在上章已经讲解过,不在叙述。
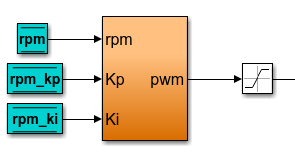
速度环PI如下图所示:
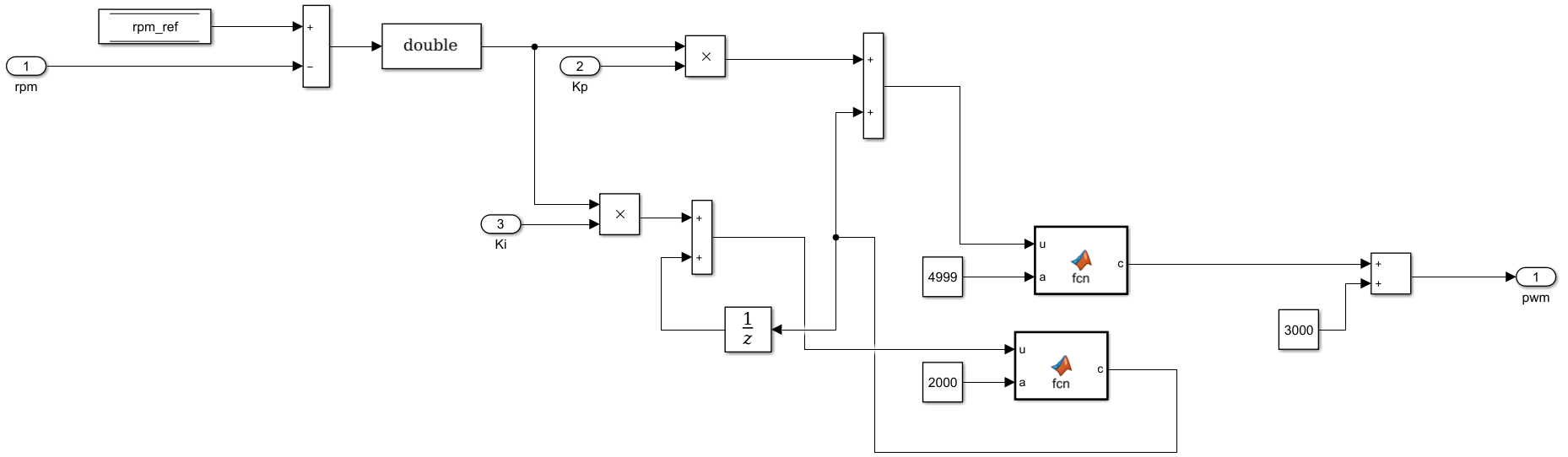
图中fcn函数是做kp、ki的限幅。
速度检测使用的是无刷电机自带的1000线的增量式光电编码器,实验用电机如下。

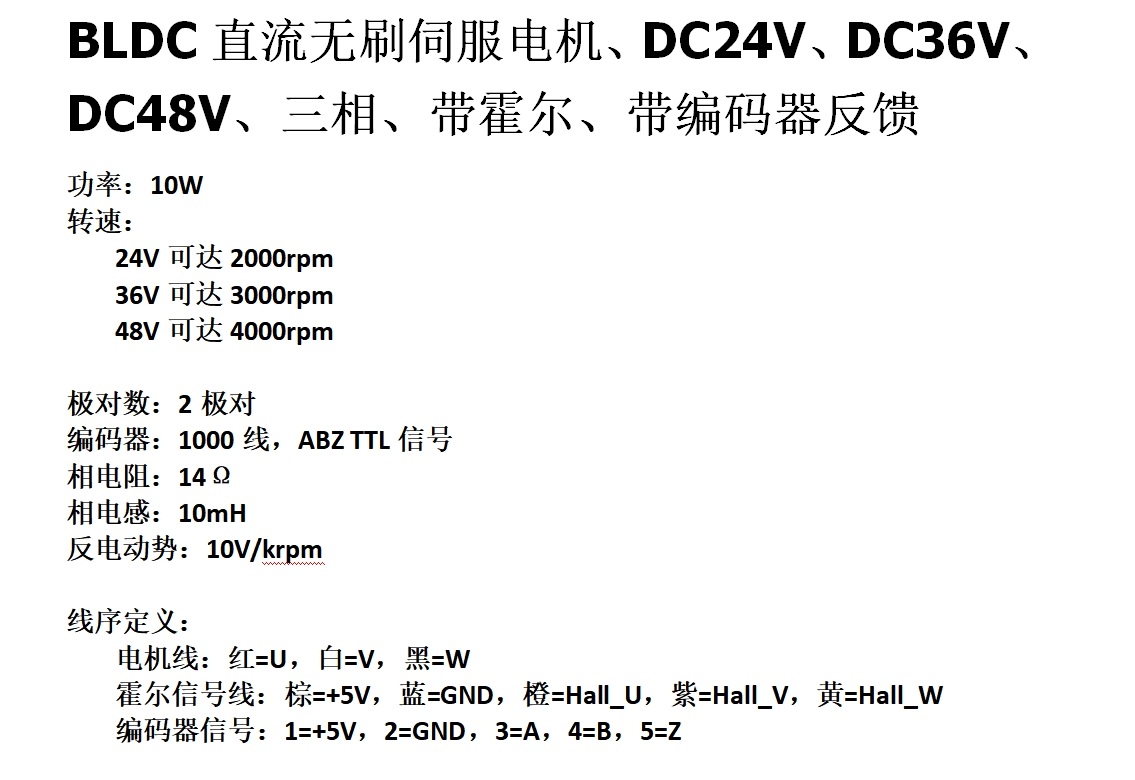
使用M法测速,M法又称之为测频法,其测速原理是在规定的检测时间T内,对光电编码器输出的脉冲信号计数的测速方法,例如光电编码器是N线的,则每旋转一周可以有4N个脉冲,因为两路脉冲的上升沿与下降沿正好是编码器信号4倍频。现在假设检测时间是T,计数器的记录的脉冲数是M,则电机的每分钟的转速计算公式如下:

代码生成速度检测如下:
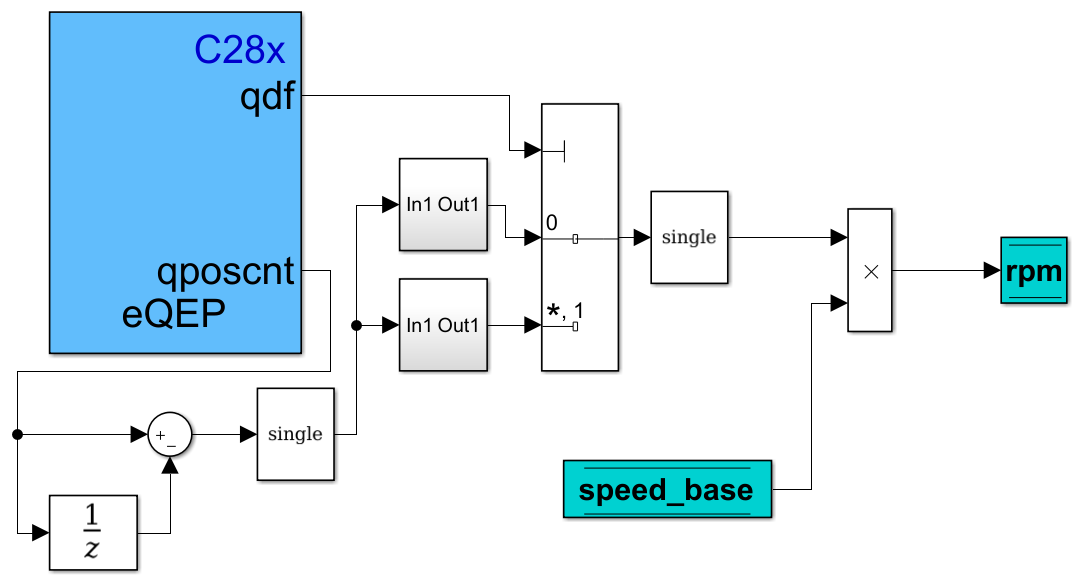
qdf是电机旋转方向,qposcnt是单位时间内检测到的脉冲数。

















 1999
1999

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









