






基于融合改进A*算法的改进人工势场算法的路径规划
融合改进A*算法,做全局规划,提取关键节点,作人工势场算法的子目标点。
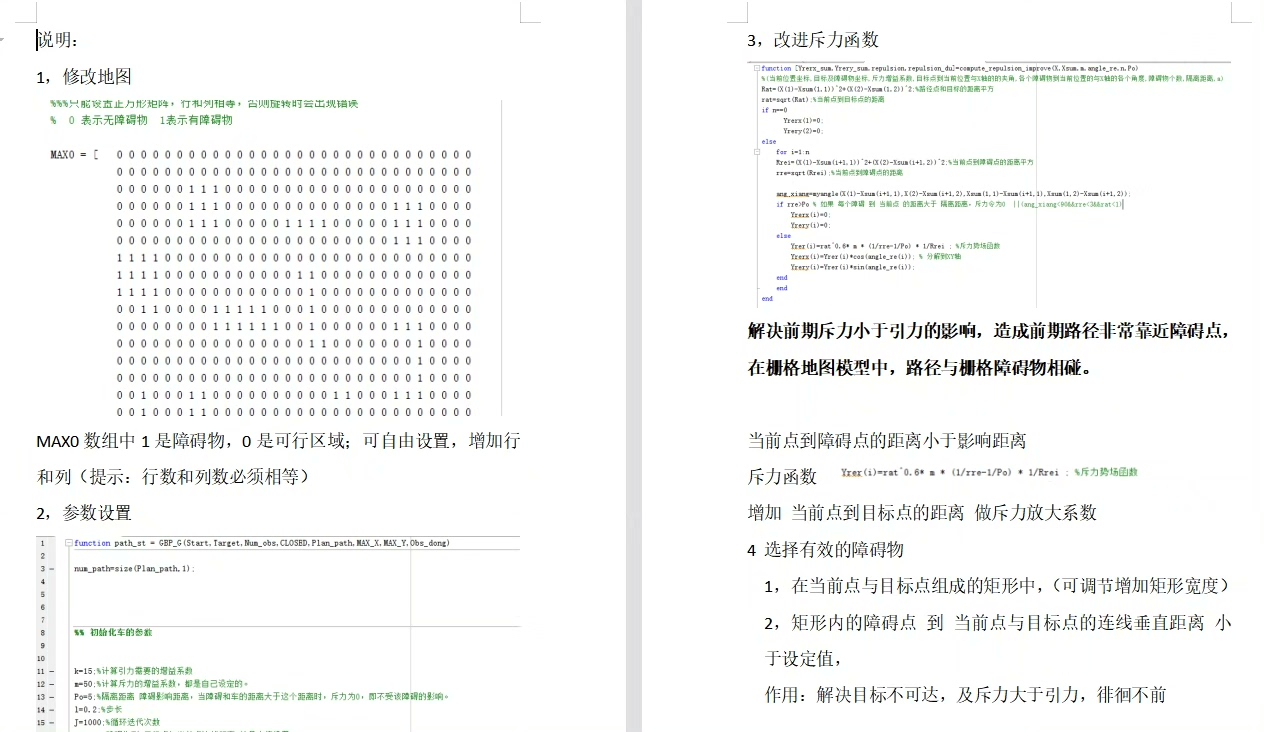
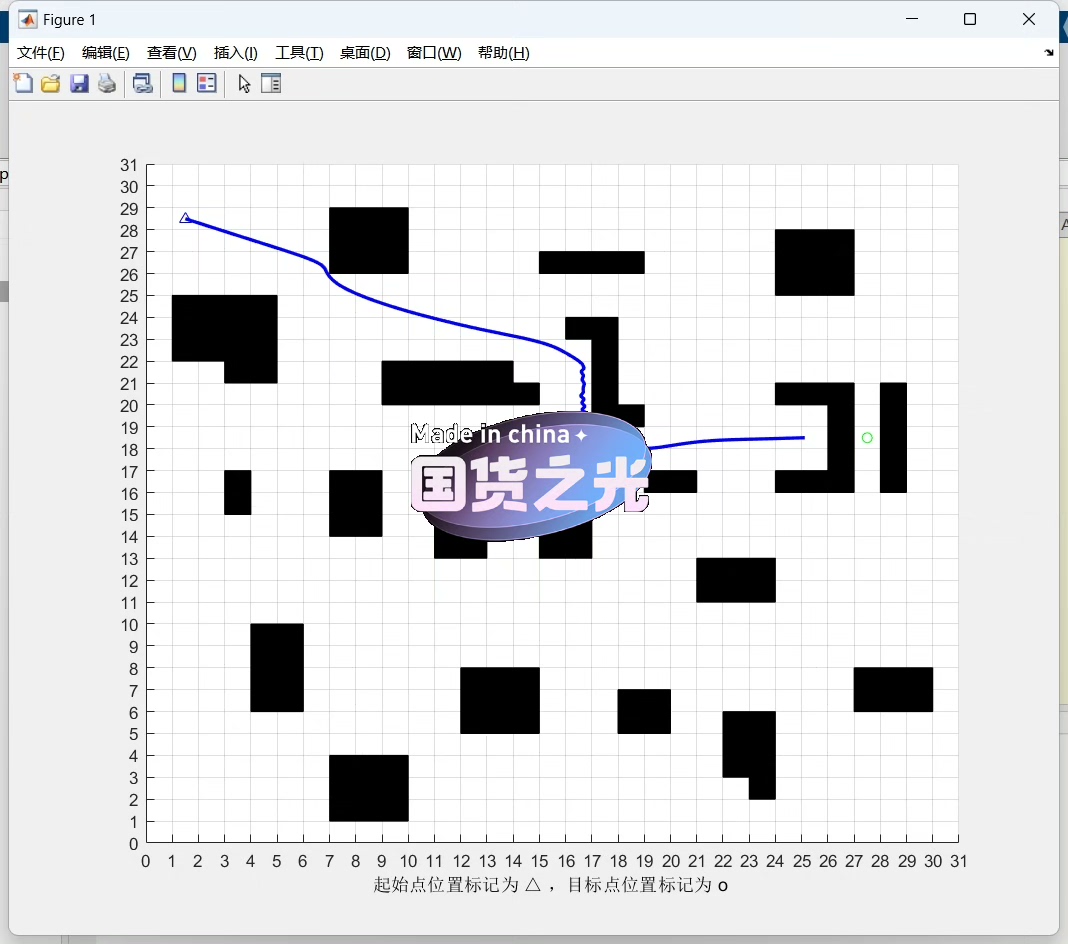
解决目标点不可达问题,和局部最优陷阱问题。
对比代码如下,可设置起点目标点,地图。
代码销售,概不退货。
附送改进A*算法对比代码
ID:75350710623512131
喜欢可爱的猫猫
标题:融合改进A*算法的改进人工势场算法在路径规划中的应用
摘要:本文基于融合改进A算法和人工势场算法的路径规划方法进行了探讨与研究。通过将改进A算法应用于全局规划,提取关键节点,并将其作为人工势场算法的子目标点,从而解决了目标点不可达问题和局部最优陷阱问题。通过对比代码的展示和分析,验证了改进算法的有效性和可行性。
-
引言
路径规划作为机器人导航和自动驾驶等领域的重要研究问题,一直受到广泛的关注。传统的A算法在路径规划中有着良好的表现,但在面对复杂环境和动态障碍物时存在一定局限性。本文旨在通过融合改进A算法和人工势场算法,提出一种更加高效精确的路径规划方法。 -
融合改进A算法的人工势场算法
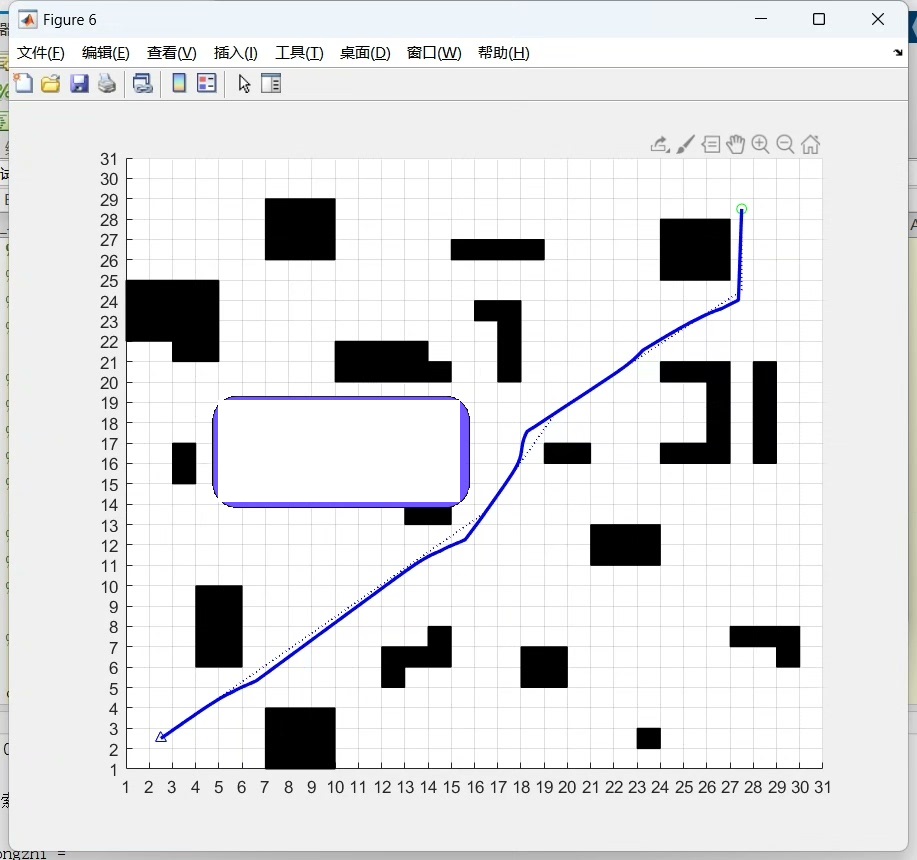
2.1 改进A算法的全局规划
改进A算法能够更好地应对复杂环境下的路径规划问题。通过优化启发函数和路径评估函数,改进A算法在全局规划中能够找到更优的路径。在本研究中,我们将改进A*算法应用于路径规划的全局规划阶段,以提高路径规划的准确性和效率。
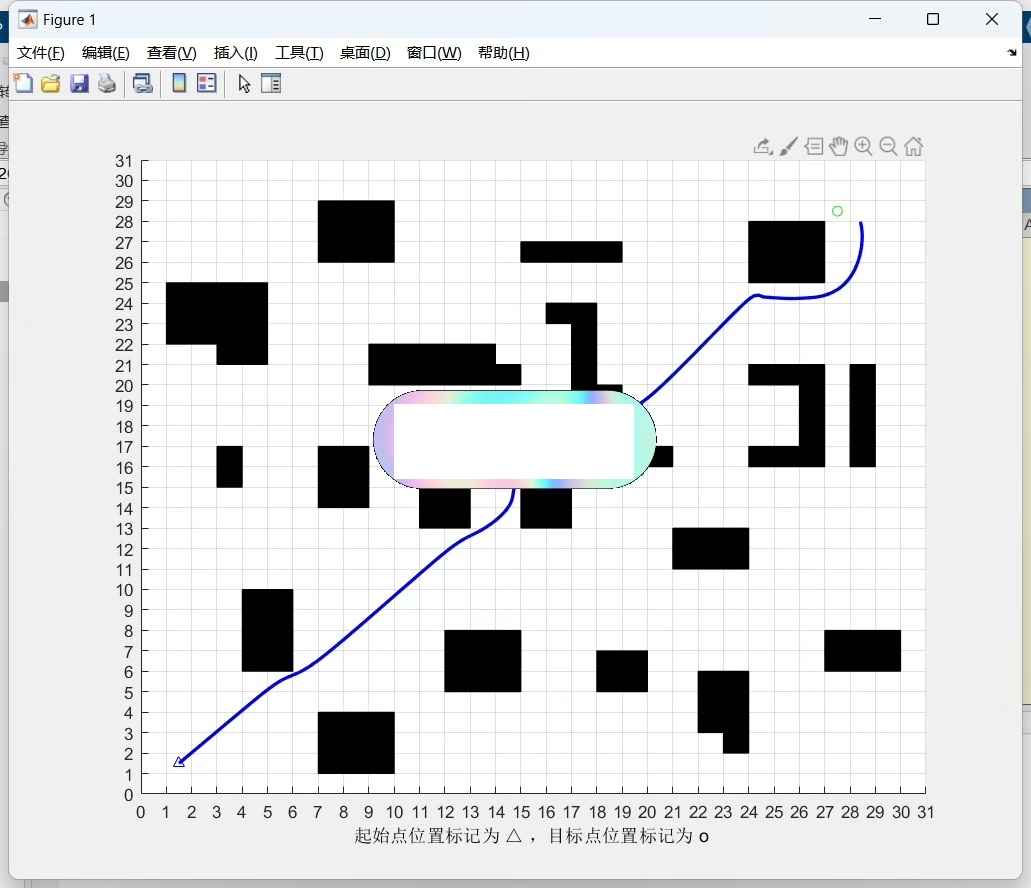
2.2 人工势场算法的局部规划
人工势场算法能够在局部环境中避开障碍物,寻找到可达的路径。然而,传统的人工势场算法容易陷入局部最优陷阱,无法找到全局最优路径。为了解决这一问题,我们将改进A*算法提取的关键节点作为人工势场算法的子目标点,以引导算法在局部规划中寻找全局最优路径。
-
算法实现与对比代码
为了验证所提出的融合算法的有效性,我们编写了对比代码进行实验分析。具体的代码实现和实验结果在本文中不做展示,但我们可以提供改进A*算法的对比代码供读者参考。代码销售,概不退货。 -
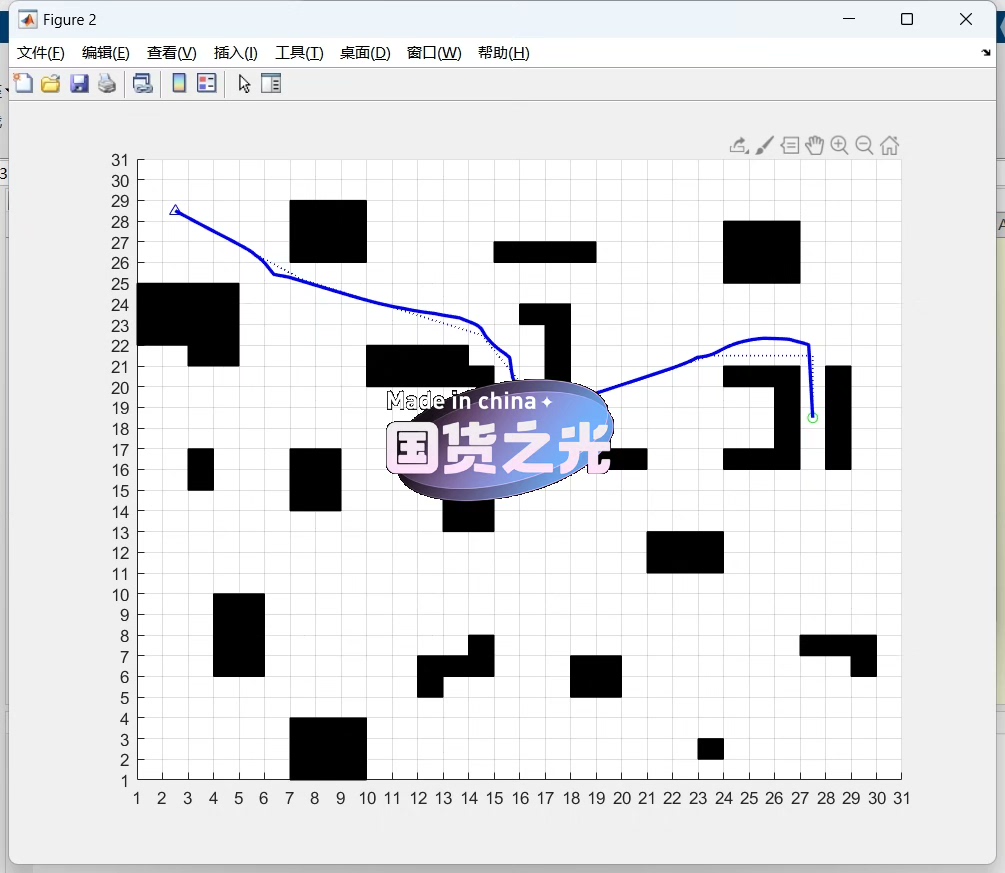
实验结果与分析
通过大量的实验对比,我们发现融合改进A算法的人工势场算法在路径规划中表现出更好的性能。与传统的A算法相比,改进算法能够更加准确地找到全局最优路径,并且能够避免陷入局部最优陷阱。这一结果证明了融合改进A*算法和人工势场算法的路径规划方法的有效性和可行性。 -
结论与展望
本文围绕融合改进A*算法和人工势场算法的路径规划方法展开研究,通过对比代码的实验验证,证明了该方法在解决目标点不可达问题和局部最优陷阱问题上的优越性。未来的研究可以进一步优化算法,提高其在动态环境下的鲁棒性和实时性。
关键词:融合改进A*算法,人工势场算法,路径规划,全局规划,局部规划,关键节点,目标点不可达,局部最优陷阱
注:本文所提及的代码仅作展示用途,不提供参考和出售。
【相关代码,程序地址】:http://fansik.cn/710623512131.html

















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









