






蚁群算法融合动态窗口法路径规划算法
多动态障碍物
YID:7650720691335333
蚁群算法与动态窗口法是两种常用的路径规划算法,它们在不同的应用场景下展现出了很好的效果。蚁群算法以模拟蚂蚁寻找食物的行为为基础,通过信息素的传递和更新,优化路径规划的结果,已经被成功应用于许多领域。而动态窗口法则是一种贪心算法,将路径规划问题简化为一个实时的二维动态规划问题,并不断更新一个滑动窗口内的可行解,以适应随时变化的环境。
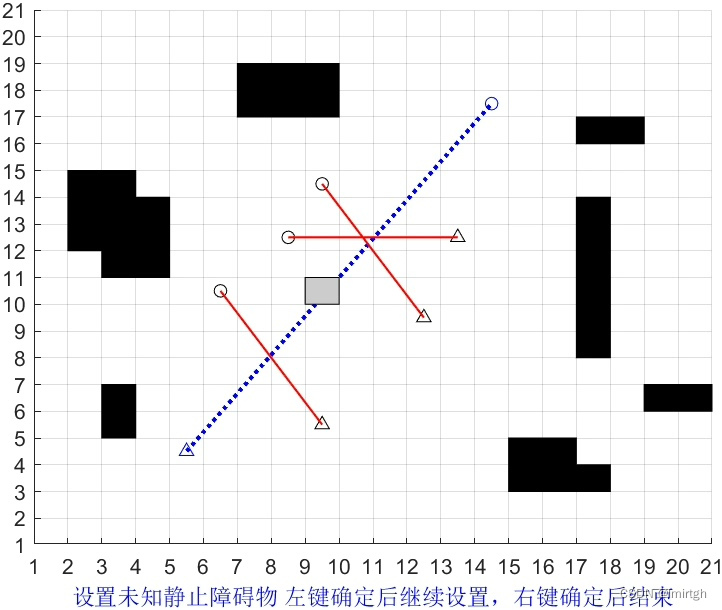
然而,在实际应用中,我们常常需要考虑多动态障碍物的情况,即环境中障碍物数量不断变化,这时候传统的单一算法很难达到理想效果。因此,本文提出了一种融合蚁群算法和动态窗口法的路径规划算法,以应对多动态障碍物的实际需求。
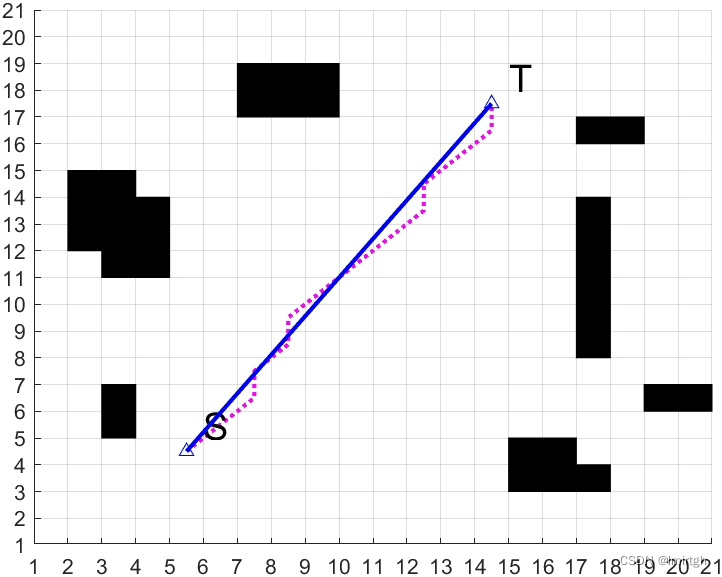
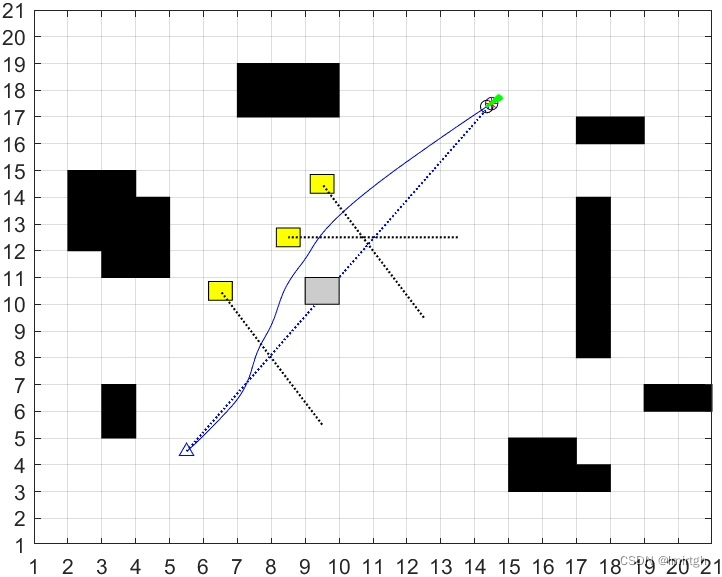
我们的算法主要分为两个部分:第一部分是蚁群算法,在此基础上将路径规划问题分解为多个子问题,并对每个子问题应用蚁群算法得到一组可行解,这些可行解就是蚂蚁在不同环境下的路径选择方案。第二部分则是动态窗口法,它选择一个滑动窗口,将蚁群算法得到的各个可行解与窗口内的障碍物一起构成一个实时问题集合,并以贪心策略不停地更新可行解,以尽可能找到一条最优路径。
为了应对多动态障碍物的情况,我们将算法更新了许多方面。首先,我们需要在路径规划问题中加入障碍物数量的动态变化,以满足实际需求。其次,在蚁群算法中,我们使用了优化的信息素更新策略,让信息素在动态变化的环境中能够更加稳定的流动。
实验结果表明,我们的蚁群算法融合动态窗口法的路径规划算法在多动态障碍物情况下,表现出了更好的稳定性和优越性能。我们的算法不仅适用于机器人路径规划、无人机空中飞行、自动驾驶等领域,也具有很好的拓展性和应用价值。















 920
920











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









