






前言
记录在正点imx6ull开发板上移植ov5640摄像头遇到的问题
一、驱动部分
NXP提供的内核源码中包含了ov5640的摄像头驱动代码ov5640.c和mx6s_capture.c两个文件,ov5640.c用于初始化摄像头配置,mx6s_capture.c用于捕捉画面
ov5640.c位于linux-imx-rel_imx_4.1.15_2.1.0_ga/drivers/media/paltform/mxc/capture

mx6s_capture.c位于linux-imx-rel_imx_4.1.15_2.1.0_ga/drivers/media/paltform/mxc/capture

我图片中的路径和文字描述不一致时因为我把NXP的源码解压到了其他路径
将编译好的两个驱动模块
 放到板子/lib/modules/4.1.15xxx/路径下(其他路径也可)。
放到板子/lib/modules/4.1.15xxx/路径下(其他路径也可)。

我是nfs挂载了根文件系统,所以放到这个目录
二、应用层源码
直接使用正点提供的源码即可
代码如下:
#include <stdio.h>
#include <stdlib.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <unistd.h>
#include <sys/ioctl.h>
#include <string.h>
#include <errno.h>
#include <sys/mman.h>
#include <linux/videodev2.h>
#include <linux/fb.h>
#define FB_DEV "/dev/fb0" //LCD设备节点
#define FRAMEBUFFER_COUNT 3 //帧缓冲数量
/*** 摄像头像素格式及其描述信息 ***/
typedef struct camera_format {
unsigned char description[32]; //字符串描述信息
unsigned int pixelformat; //像素格式
} cam_fmt;
/*** 描述一个帧缓冲的信息 ***/
typedef struct cam_buf_info {
unsigned short *start; //帧缓冲起始地址
unsigned long length; //帧缓冲长度
} cam_buf_info;
static int width; //LCD宽度
static int height; //LCD高度
static unsigned short *screen_base = NULL;//LCD显存基地址
static int fb_fd = -1; //LCD设备文件描述符
static int v4l2_fd = -1; //摄像头设备文件描述符
static cam_buf_info buf_infos[FRAMEBUFFER_COUNT];
static cam_fmt cam_fmts[10];
static int frm_width, frm_height; //视频帧宽度和高度
static int fb_dev_init(void)
{
struct fb_var_screeninfo fb_var = {0};
struct fb_fix_screeninfo fb_fix = {0};
unsigned long screen_size;
/* 打开framebuffer设备 */
fb_fd = open(FB_DEV, O_RDWR);
if (0 > fb_fd) {
fprintf(stderr, "open error: %s: %s\n", FB_DEV, strerror(errno));
return -1;
}
/* 获取framebuffer设备信息 */
ioctl(fb_fd, FBIOGET_VSCREENINFO, &fb_var);
ioctl(fb_fd, FBIOGET_FSCREENINFO, &fb_fix);
screen_size = fb_fix.line_length * fb_var.yres;
width = fb_var.xres;
height = fb_var.yres;
/* 内存映射 */
screen_base = mmap(NULL, screen_size, PROT_READ | PROT_WRITE, MAP_SHARED, fb_fd, 0);
if (MAP_FAILED == (void *)screen_base) {
perror("mmap error");
close(fb_fd);
return -1;
}
/* LCD背景刷白 */
memset(screen_base, 0xFF, screen_size);
return 0;
}
static int v4l2_dev_init(const char *device)
{
struct v4l2_capability cap = {0};
/* 打开摄像头 */
v4l2_fd = open(device, O_RDWR);
if (0 > v4l2_fd) {
fprintf(stderr, "open error: %s: %s\n", device, strerror(errno));
return -1;
}
/* 查询设备功能 */
ioctl(v4l2_fd, VIDIOC_QUERYCAP, &cap);
/* 判断是否是视频采集设备 */
if (!(V4L2_CAP_VIDEO_CAPTURE & cap.capabilities)) {
fprintf(stderr, "Error: %s: No capture video device!\n", device);
close(v4l2_fd);
return -1;
}
return 0;
}
static void v4l2_enum_formats(void)
{
struct v4l2_fmtdesc fmtdesc = {0};
/* 枚举摄像头所支持的所有像素格式以及描述信息 */
fmtdesc.index = 0;
fmtdesc.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
while (0 == ioctl(v4l2_fd, VIDIOC_ENUM_FMT, &fmtdesc)) {
// 将枚举出来的格式以及描述信息存放在数组中
cam_fmts[fmtdesc.index].pixelformat = fmtdesc.pixelformat;
strcpy(cam_fmts[fmtdesc.index].description, fmtdesc.description);
fmtdesc.index++;
}
}
static void v4l2_print_formats(void)
{
struct v4l2_frmsizeenum frmsize = {0};
struct v4l2_frmivalenum frmival = {0};
int i;
frmsize.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
frmival.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
for (i = 0; cam_fmts[i].pixelformat; i++) {
printf("format<0x%x>, description<%s>\n", cam_fmts[i].pixelformat,
cam_fmts[i].description);
/* 枚举出摄像头所支持的所有视频采集分辨率 */
frmsize.index = 0;
frmsize.pixel_format = cam_fmts[i].pixelformat;
frmival.pixel_format = cam_fmts[i].pixelformat;
while (0 == ioctl(v4l2_fd, VIDIOC_ENUM_FRAMESIZES, &frmsize)) {
printf("size<%d*%d> ",
frmsize.discrete.width,
frmsize.discrete.height);
frmsize.index++;
/* 获取摄像头视频采集帧率 */
frmival.index = 0;
frmival.width = frmsize.discrete.width;
frmival.height = frmsize.discrete.height;
while (0 == ioctl(v4l2_fd, VIDIOC_ENUM_FRAMEINTERVALS, &frmival)) {
printf("<%dfps>", frmival.discrete.denominator /
frmival.discrete.numerator);
frmival.index++;
}
printf("\n");
}
printf("\n");
}
}
static int v4l2_set_format(void)
{
struct v4l2_format fmt = {0};
struct v4l2_streamparm streamparm = {0};
/* 设置帧格式 */
fmt.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;//type类型
fmt.fmt.pix.width = width; //视频帧宽度
fmt.fmt.pix.height = height;//视频帧高度
fmt.fmt.pix.pixelformat = V4L2_PIX_FMT_RGB565; //像素格式
if (0 > ioctl(v4l2_fd, VIDIOC_S_FMT, &fmt)) {
fprintf(stderr, "ioctl error: VIDIOC_S_FMT: %s\n", strerror(errno));
return -1;
}
/*** 判断是否已经设置为我们要求的RGB565像素格式
如果没有设置成功表示该设备不支持RGB565像素格式 */
if (V4L2_PIX_FMT_RGB565 != fmt.fmt.pix.pixelformat) {
fprintf(stderr, "Error: the device does not support RGB565 format!\n");
return -1;
}
frm_width = fmt.fmt.pix.width; //获取实际的帧宽度
frm_height = fmt.fmt.pix.height;//获取实际的帧高度
printf("视频帧大小<%d * %d>\n", frm_width, frm_height);
/* 获取streamparm */
streamparm.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
ioctl(v4l2_fd, VIDIOC_G_PARM, &streamparm);
/** 判断是否支持帧率设置 **/
if (V4L2_CAP_TIMEPERFRAME & streamparm.parm.capture.capability) {
streamparm.parm.capture.timeperframe.numerator = 1;
streamparm.parm.capture.timeperframe.denominator = 30;//30fps
if (0 > ioctl(v4l2_fd, VIDIOC_S_PARM, &streamparm)) {
fprintf(stderr, "ioctl error: VIDIOC_S_PARM: %s\n", strerror(errno));
return -1;
}
}
return 0;
}
static int v4l2_init_buffer(void)
{
struct v4l2_requestbuffers reqbuf = {0};
struct v4l2_buffer buf = {0};
/* 申请帧缓冲 */
reqbuf.count = FRAMEBUFFER_COUNT; //帧缓冲的数量
reqbuf.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
reqbuf.memory = V4L2_MEMORY_MMAP;
if (0 > ioctl(v4l2_fd, VIDIOC_REQBUFS, &reqbuf)) {
fprintf(stderr, "ioctl error: VIDIOC_REQBUFS: %s\n", strerror(errno));
return -1;
}
/* 建立内存映射 */
buf.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
buf.memory = V4L2_MEMORY_MMAP;
for (buf.index = 0; buf.index < FRAMEBUFFER_COUNT; buf.index++) {
ioctl(v4l2_fd, VIDIOC_QUERYBUF, &buf);
buf_infos[buf.index].length = buf.length;
buf_infos[buf.index].start = mmap(NULL, buf.length,
PROT_READ | PROT_WRITE, MAP_SHARED,
v4l2_fd, buf.m.offset);
if (MAP_FAILED == buf_infos[buf.index].start) {
perror("mmap error");
return -1;
}
}
/* 入队 */
for (buf.index = 0; buf.index < FRAMEBUFFER_COUNT; buf.index++) {
if (0 > ioctl(v4l2_fd, VIDIOC_QBUF, &buf)) {
fprintf(stderr, "ioctl error: VIDIOC_QBUF: %s\n", strerror(errno));
return -1;
}
}
return 0;
}
static int v4l2_stream_on(void)
{
/* 打开摄像头、摄像头开始采集数据 */
enum v4l2_buf_type type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
if (0 > ioctl(v4l2_fd, VIDIOC_STREAMON, &type)) {
fprintf(stderr, "ioctl error: VIDIOC_STREAMON: %s\n", strerror(errno));
return -1;
}
return 0;
}
static void v4l2_read_data(void)
{
struct v4l2_buffer buf = {0};
unsigned short *base;
unsigned short *start;
int min_w, min_h;
int j;
if (width > frm_width)
min_w = frm_width;
else
min_w = width;
if (height > frm_height)
min_h = frm_height;
else
min_h = height;
buf.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
buf.memory = V4L2_MEMORY_MMAP;
for ( ; ; ) {
for(buf.index = 0; buf.index < FRAMEBUFFER_COUNT; buf.index++) {
ioctl(v4l2_fd, VIDIOC_DQBUF, &buf); //出队
for (j = 0, base=screen_base, start=buf_infos[buf.index].start;
j < min_h; j++) {
memcpy(base, start, min_w * 2); //RGB565 一个像素占2个字节
base += width; //LCD显示指向下一行
start += frm_width;//指向下一行数据
}
// 数据处理完之后、再入队、往复
ioctl(v4l2_fd, VIDIOC_QBUF, &buf);
}
}
}
int main(int argc, char *argv[])
{
if (2 != argc) {
fprintf(stderr, "Usage: %s <video_dev>\n", argv[0]);
exit(EXIT_FAILURE);
}
/* 初始化LCD */
if (fb_dev_init())
exit(EXIT_FAILURE);
/* 初始化摄像头 */
if (v4l2_dev_init(argv[1]))
exit(EXIT_FAILURE);
/* 枚举所有格式并打印摄像头支持的分辨率及帧率 */
v4l2_enum_formats();
v4l2_print_formats();
/* 设置格式 */
if (v4l2_set_format())
exit(EXIT_FAILURE);
/* 初始化帧缓冲:申请、内存映射、入队 */
if (v4l2_init_buffer())
exit(EXIT_FAILURE);
/* 开启视频采集 */
if (v4l2_stream_on())
exit(EXIT_FAILURE);
/* 读取数据:出队 */
v4l2_read_data(); //在函数内循环采集数据、将其显示到LCD屏
exit(EXIT_SUCCESS);
}
编译后拷贝到板端

三、板端运行
开发板重新上点,可以看到驱动在/lib/modules/4.1.15xxx/路径下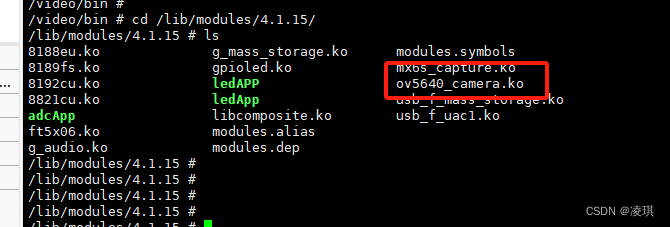
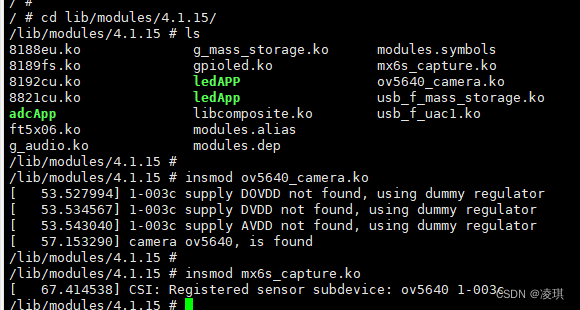
依次加载这两个驱动
运行应用测试程序
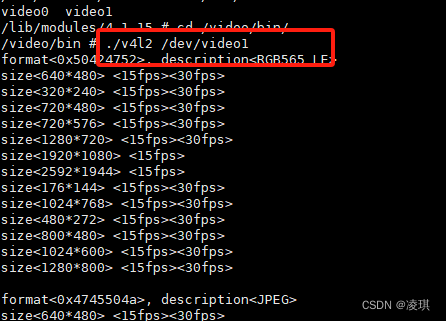
运行效果如下
















 892
892











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









