







系列文章目录
提示:这里可以添加系列文章的所有文章的目录,目录需要自己手动添加
简单分享下这个方案的基本参数规格:
- 支持4个座椅电机
- 支持座椅电机记忆功能
- 支持4向腰托
- 支持2个风扇(带调速)
- 支持2个震动电机(带调速)
- 支持网络/485/I/O控制
后面会详细的分享硬件和软件的设计。算是开个头吧,花点时间慢慢整理。
提示:写完文章后,目录可以自动生成,如何生成可参考右边的帮助文档
1、座椅电机控制模块
座椅电机的类型基本都是直流有刷电机,相对来说使用环境比较简单,并且使用频率也不会很高。一天用个几分钟而已,所以有刷也足够,并且在行业早期,都是通过一些按键纯电路来实现的电机控制,所以也会选择控制起来比较简单的有刷电机。
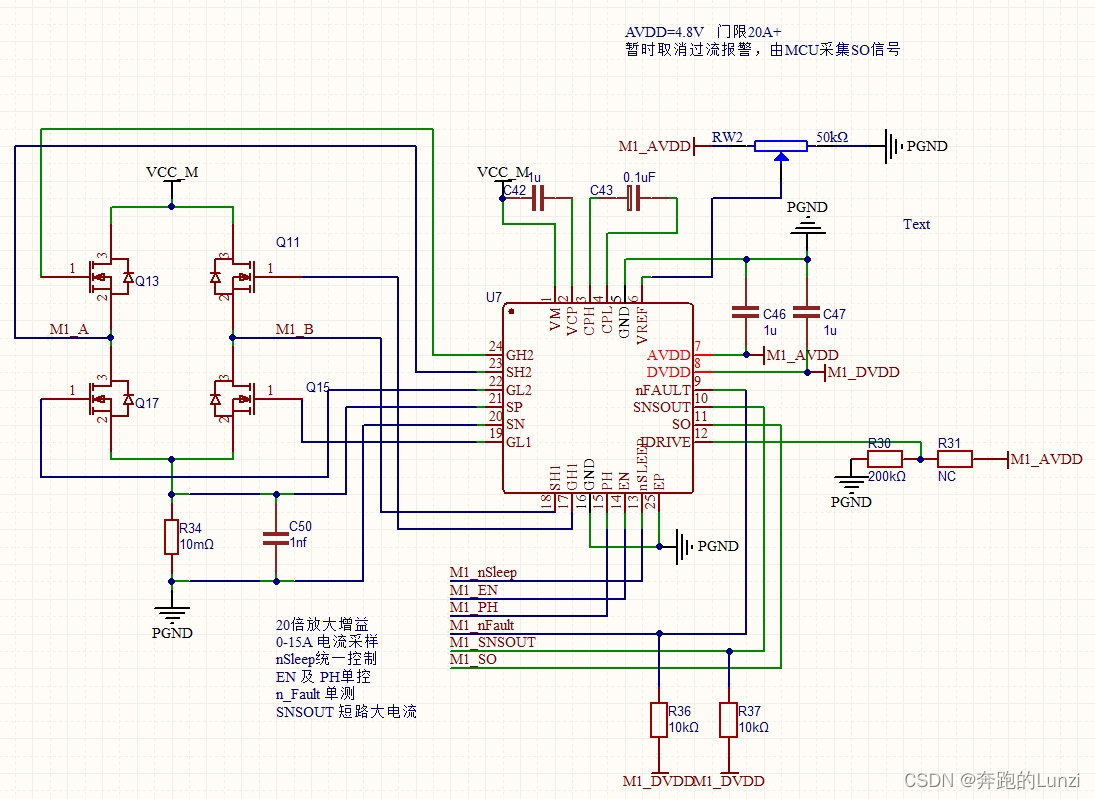
本方案中选择TI的DRV8701来进行电机的控制。其芯片特性如下:
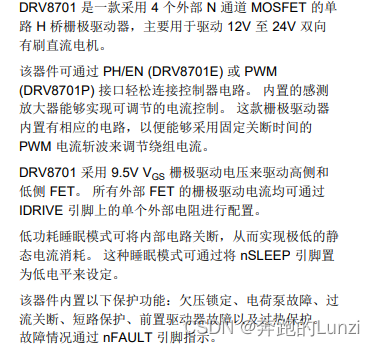
这里有几个特点需要额外注意:
1、适合12V 和 24V系统
2、采用的是外部4个N-MOS,可以根据使用的电机功率来选择对应的N-MOS型号
3、带电流输出,这样会比较方便做堵转检测和防夹
整体电路上没有特别的难点,主要就是根据Datasheet进行设计,MOS的话可以选择内阻低一点的,这样动作的时候发热会低一些。
IDDriver 用来控制MOS管的驱动电流,电流越大MOS开关的速度越快,一般
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2664
2664

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











