









 本文介绍使用松下伺服电机A6SF系列进行Modbus控制的方法,包括使用PANATERM软件试运行电机、开启BLOCKMOTION功能及电机零点设置等关键步骤。
本文介绍使用松下伺服电机A6SF系列进行Modbus控制的方法,包括使用PANATERM软件试运行电机、开启BLOCKMOTION功能及电机零点设置等关键步骤。
松下伺服电机与驱动器A6SF的modbus控制——位置控制(1)
前言(必看)
项目中接触到了松下伺服电机,发现日本人写的说明书是真的详细,几乎所有的问题它都有介绍,不过正因为如此导致说明书的内容太多,有时不小心就会遗漏掉关键的东西导致反复查找,所以本文记录一些踩过的坑,让你最起码可以顺利的用代码将它跑起来。建议将本文结合松下的技术资料一起看,最好先看几遍技术资料,然后结合我所写的基本上就没问题了,后面的话我也会将我用的技术资料上传,在说一遍技术资料很重要,你看了几遍在接触其他国产厂家的说明书,你也许会和我一样对松下的说明书又爱又恨,此外发现了B站的一个宝藏视频,对松下电机的block motion功能做了很详细的说明,推荐观看。https://www.bilibili.com/video/BV1h7411K7xJ 这个也建议在看完技术资料后观看。
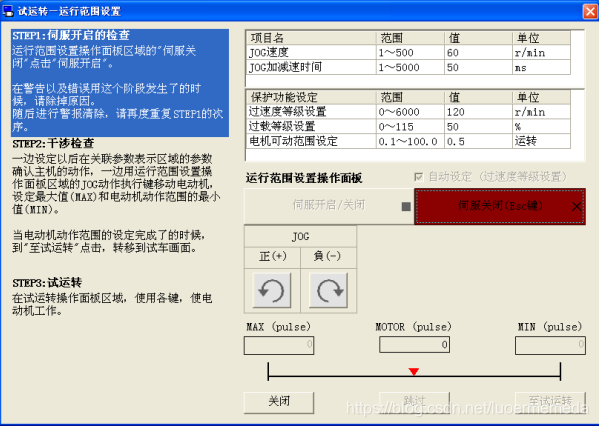
使用PANATERM 对电机进行试运行
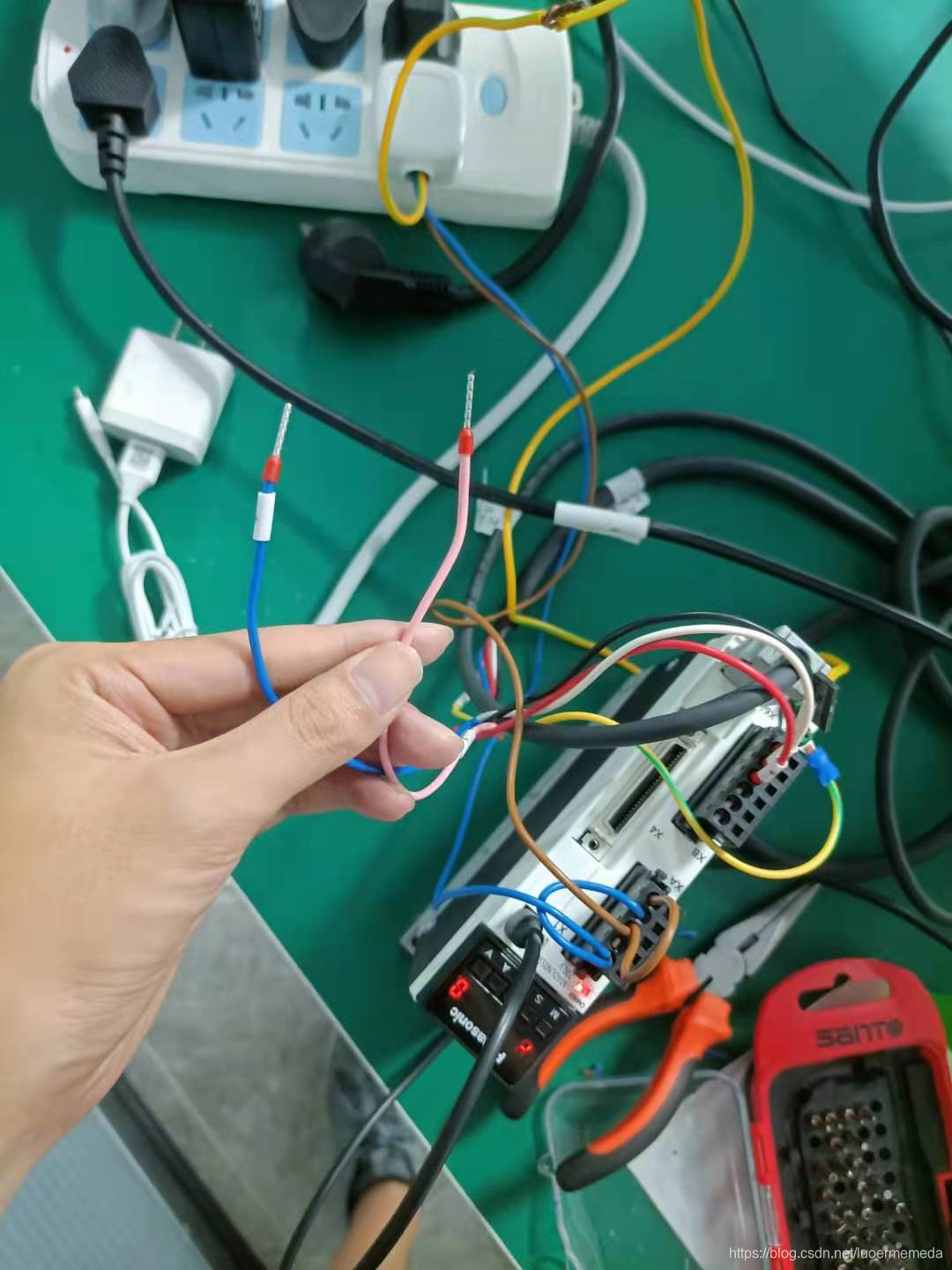
在刚将电机组装起来之后,尝试让电机动一动,首先我是使用USB-mini进行通讯,在我打开伺服后电机JOG按钮后,电机动了一下,然后过载保护16报警,无法试运行,经过排查连接图没有图中电机这两条线的连接,经过询问这两条线正常是通过继电器控制,连通24V才能打开电机的刹车,我们不用继电器,所以后来就直接接到24V电源上了,不对它进行控制,有需要的也可以连继电器。
关于block motion的开启
PANATERM中如果想要开启BLOCK MOTION编辑器,需要将BLOCK MOTION 开启,在参数里面的分类6的28特殊功能选择,由于我用modbus所以设置为1,只要不为0,都可以开启。写入EEP后重启驱动器就开启了。
需要注意在开启block motion后就不能使用试运行了,此刻点击试运行将会弹窗“其他进程使用”,如果你仍然需要使用试运行需要将block motion功能关闭。

松下电机零点与编码器的关系
松下此型号电机只有当使用绝对式编码器才能够进行设置零点和零点复归。当参数中的编码器类型选择绝对式而实际用的是增量式,每次开机会报一下错误,在将编码器相关参数改为增量式并重启。 下一篇将会写block motion功能使用,以及使用绝对式编码器初始化与零点设置。
下一篇将会写block motion功能使用,以及使用绝对式编码器初始化与零点设置。

















 1350
1350

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









