







SPI(Serial Peripheral Interface,串行外设接口)是Motorola公司提出的一种同步串行数据传输标准,在很多器件中被广泛应用。
1. 接口
SPI接口经常被称为4线串行总线,SPI协议是主从模式:从机不主动发起访问,总是被动执行操作,数据传输过程由主机初始化。
如图1所示,其使用的4条信号线分别为:
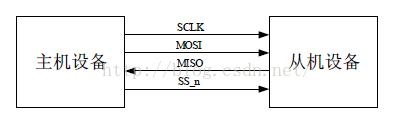

1) SCLK:串行时钟,用来同步数据传输,由主机输出;
2) MOSI:主机输出从机输入数据线;
3) MISO:主机输入从机输出数据线;
4) SS:片选线,低电平有效,由主机输出。
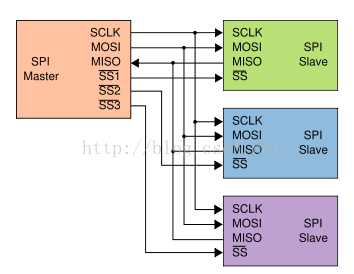
在SPI总线上,某一时刻可以出现多个从机,但只能存在一个主机,主机通过片选线来确定要通信的从机。这就要求从机的MISO口具有三态特性,使得该口线在器件未被选通时表现为高阻抗。
2. 数据传输
在一个SPI时钟周期内,会完成如下操作:
1) 主机通过MOSI线发送1位数据,从机通过该线读取这1位数据;
2) 从机通过MISO线发送1位数据,主机通过该线读取这1位数据。
这是通过移位寄存器来实现的。如图2所示,主机和从机各有一个移位寄存器,且二者连接成环。随着时钟脉冲,数据按照从高位到低位的方式依次移出主机寄存器和从机寄存器,并且依次移入从机寄存器和主机寄存器。当寄存器中的内容全部移出时,相当于完成了两个寄存器内容的交换。

3. 时钟极性和时钟相位
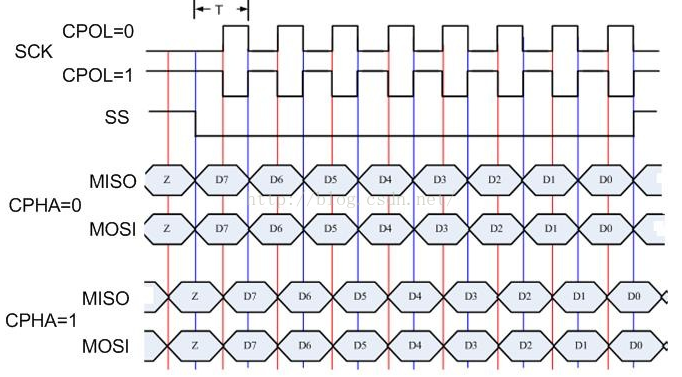
在SPI操作中,最重要的两项设置就是时钟极性Clock polarity(CPOL或UCCKPL)和时钟相位Clock phase(CPHA或UCCKPH)。时钟极性设置时钟空闲时的电平,时钟相位设置读取数据和发送数据的时钟沿。
主机和从机的发送数据是同时完成的,两者的接收数据也是同时完成的。所以为了保证主从机正确通信,应使得它们的SPI具有相同的时钟极性和时钟相位。
举例来说,分别选取MSP430控制器和OLED驱动SH1101A为主从机,下图为它们的SPI时序。由图可知,SH1101A的SPI时钟空闲时为高电平(CPOL=1),并且在后时钟沿接收数据(CPHA=1),则MSP430控制器SPI的设置应与此保持一致。
下面两图读写时序图,从图中可知时钟极性为0,上升沿读取数据,与上图不同。
写操作时序图:
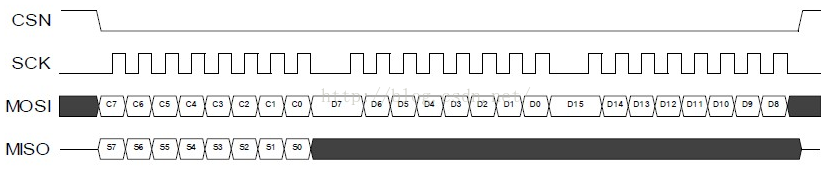
读操作时序图:
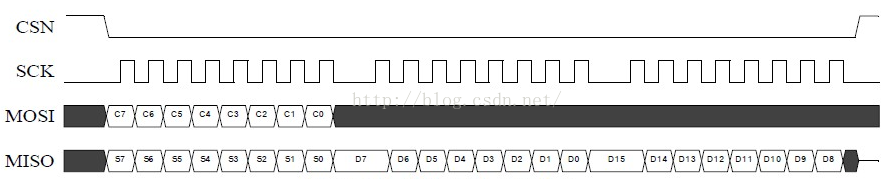
如图示为SPI读时序和写时序。按照读写时序输出字节(MOSI)就会从MSB 循环输出,同将输入字节(MISO)从LSB 循环移入,每次移动一位。
上升沿输入,下降沿输出。也就是说:MCU在时钟信号的上升沿时写(write),下降沿时读(read).
nRF24L01支持标准SPI四线接口。以nRF24L01芯片的PDF为例说明SPI的基本读写,具体代码如下:
4. 优缺点
优点:
1) 支持全双工操作;
2) 操作简单;
3) 数据传输速率较高。
1) 需要占用主机较多的口线(每个从机都需要一根片选线);
2) 只支持单个主机。
参考:http://www.cnblogs.com/king-77024128/articles/2203207.html,http://jackyhau1024.blog.163.com/blog/static/1778200402015230115230854/文章中内容,在此感谢!















 5893
5893

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









