







Abstract
1、在过往研究中,图像去噪算法缺少无噪声的真值,而人为构建的噪声模型不真实,效果不好。
2、作者的思路:构建有噪图&对应的无噪图的成对真实数据集——本文的贡献
Amber:这是很硬核的做实事的思路,实现过程必然遇到很多工程问题。
- 获取有噪图和对应无噪图的方法:不同模拟增益(ISO) +适当调整曝光时长
- 为获得真值的后处理步骤
- 基于异方差 Tobit 回归模型的线性强度变换来校正空间错位,处理曝光参数的不准确性
- 去除由微小光照变化等引起的残留低频偏置
3、成果
- 构建的基准数据集:the Darmstadt Noise Dataset (DND)
- 发现了在合成的噪声数据集上表现更好的最新的技术方法,在真实噪声图上表现不如传统方法 BM3D
- 提出了和以往科学方法不同的现实评估方案——有开创性
看 BM3D 实现思路:DONE,看了摘要,暂时不进一步深入
【科普】
ISO 表示 sensor 感光模块的感光度。同样曝光时间下,ISO值越小,画面越暗;ISO值越大,画面越亮,但是画面会增加噪点,降低画质,特别是晚上拍摄时噪点非常明显。
ISO值越小拍的照片越精细,ISO值越高拍的照片噪点越多越蒙。
1、Introduction
为什么需要图像后处理?
- 实际应用中传感器的模拟增益和曝光时间无法非常精准控制,这使得两张图片的强度上存在线性依赖关系。——要消除掉(个人理解是模型会优先学依赖关系,偷懒得到局部最优解,但这很容易过拟合,模型不具有普适性)
- 光照的微小变化会导致低频偏置——通过高通滤波
在噪声为零均值的变换域中去除有噪图和参考真值图之间的残差 - 移动的物体和曝光之间微小的相机抖动——手动标注和亚像素对齐
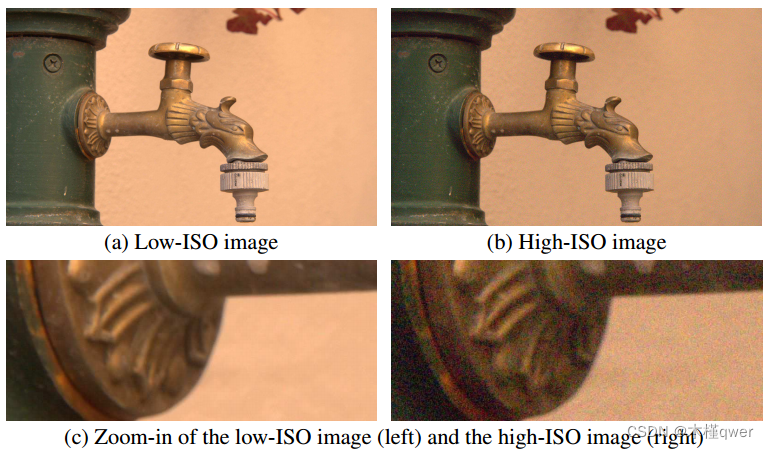
如图:几乎无噪声的低 ISO 图像,和有噪声的高 ISO 图像。实际工作使用的 RAW 图,为了展示效果此处用 JPEG。
莫林:高增益有噪声,低增益可以直接做真值吗?
Amber:RAW 图怎么获得?有些商业相机所谓的 RAW 图也是经过一些处理压缩后的结果。作者用的 RAW 图是怎样的。
本文发现
1、对真实噪声图像,传统方法BM3D比当前技术有更好的表现
2、消费相机的噪声强度明显低于文献中通常的假设
2、Related Work
shot noise:光子撞击传感器的随机到达过程引起的噪声,符合泊松分布。
方差与特定像素处的平均强度成正比,因此在整个图像上不是平稳的。

在 DND 数据集上测试降噪算法,指标为平均PSNR。
RAW
VST
sRGB

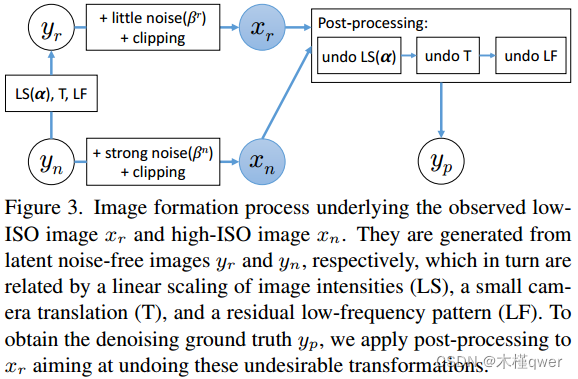
背景知识:无噪声的图片强度正比于曝光时间,也正比于ISO。
yr和yn是理想的无噪图片。
yn的ISO是yr的n倍,yr的曝光时长是yn的n倍,那么理论来说yn=yr。
因为yr→xr是ISO小,增加曝光时长,实际产生的图片xr噪声也小,因此xr可以近似等同于yr。
而yn→xn是ISO大,曝光时间短,这个过程产生的噪声大。
理想情况是,我们用yn作为有噪图xn的真值,但是由于我们无法获得yn,于是yn=yr≈xr,一退再退,用xr作为xn的真值。
而后xr后处理post-processing
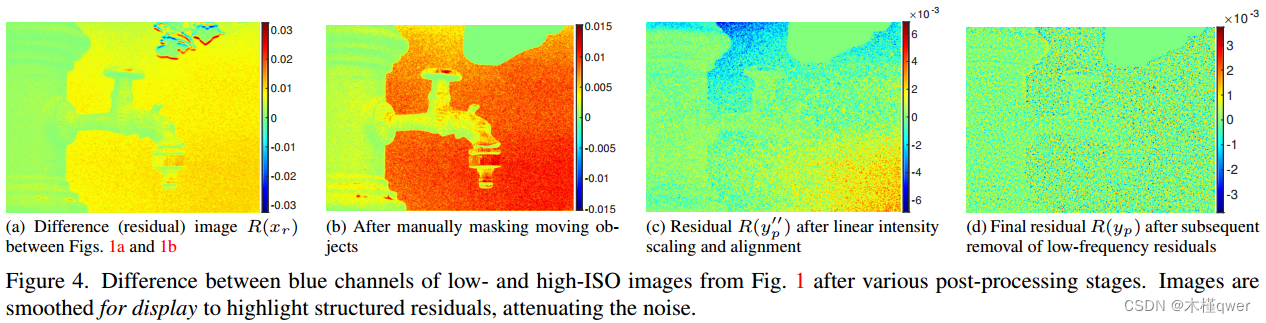
4、Post-Processing
这部分内容没仔细看,讲得太复杂了。它大概意思是:测试发现xr和xn之间除了噪声以外还有别的差异,主要原因是增益和曝光时间不准确引起的误差,作者提出了异方差Tobit回归模型进行校正。
如果我后续采集了raw域图像数据,确实需要做精细化后处理,再来补充阅读。现在我的工作不需要到这一精度。















 1143
1143











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









