







稀疏三维变换域协同滤波图像去噪
Amber:人的认知是不断加深的,现在不懂没有关系,只要你不断地阅读,一步一步的最终认识会到达可以看懂它的程度。
Abstract
这篇文章思路很难理解,我先只看摘要,后续
1、提出一种基于变换域增强稀疏表示的图像去噪策略。
2、将相似的二维图像块分组到三维数据数组中,可以增强稀疏性。协同滤波:用于处理三维数组。
Amber:为啥要增强稀疏表示啊,有什么好处。协同滤波又是怎么实现的。
经过组的三维变换、变换谱的收缩、三维逆变换三个步骤,得到由联合过滤分组图像块组成的三维估计。
通过对噪声的衰减,协同滤波甚至可以揭示分组块共享的最精细的细节,同时,它保留了每个单独块的基本独特特征。然后将过滤后的块返回到其原始位置。
对每个像素来说这些块是重叠的(也就是有冗余),我们得到许多不同的估计,这些估计需要组合起来。聚合是利用这种冗余的一种特殊的平均过程。
协同维纳滤波对性能有显著提升。
详细介绍了一种基于该去噪策略的算法及其有效实现,对彩色图像去噪进行了扩展。实验结果表明,该算法在峰值信噪比和主观视觉质量方面都达到了最先进的去噪性能。
索引:自适应分组、块匹配、图像去噪、稀疏性、三维变换收缩
Amber:真的很难懂,你看这篇文章的索引关键词就知道多离谱!我只看得懂一个“图像去噪”
1 、Introduction
2、Grouping and Collaborative Filtering
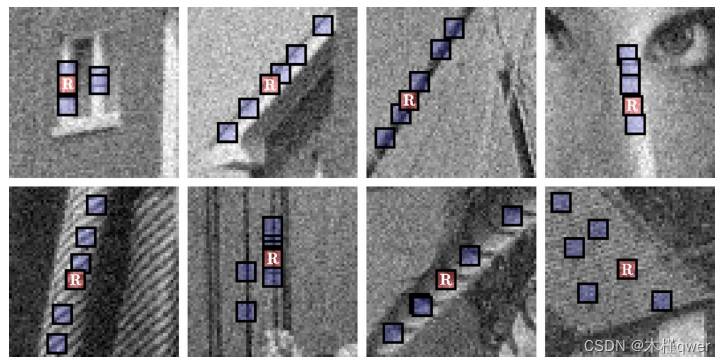
Block Matching(BM)块匹配,广泛用于视频压缩的运动估计,可以用来寻找图片中相似的块,上图是一组说明性的示例。图片加了标准差 15 方差 0 的高斯白噪声,红色方块是参考块,紫色是找到的特征相似的匹配块。
3、Algorithm
块匹配实现分组,3D 变换域的收缩实现协同滤波
算法处理的步骤
- 1、基本估计
- 逐块估计。对于噪声图的每个块,执行:
分组
查找与当前处理的块相似的块将它们堆叠在一起形成一个3D数组(组)。- 对形成的组应用
3D 变换,通过变换系数的 hard-threading来衰减噪声,对 3D 变换进行invert以产生所有分组块的估计,并将块的估计返回到它们的原始位置。
- 聚合。通过加权平均所有获得的重叠块估计来计算真图像的基本估计。
- 逐块估计。对于噪声图的每个块,执行:
- 2、最终估计:使用基本估计,执行
改进的分组和协作维纳过滤。-
逐块估计。对于每个块,执行:
分组
在基本估计中使用BM来查找与当前处理的块相似的块的位置。利用这些位置,形成两组 3D 矩阵,一组来自噪声图像,另一组来自基本估计。协同维纳过滤
对两个组应用3D 变换。用基本估计的能谱作为真(导)能谱对带噪声的谱进行维纳滤波。
通过对过滤系数应用逆三维变换产生所有分组块的估计值,并将块的估计值返回到其原始位置。
-
聚合。
通过使用加权平均值将所有获得的局部估计值汇总,计算真图像的最终估计值。
-
















 5212
5212











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









