







1.下载固件
登录官网,选择“Firmware”
(手机可以下载安装右侧“APP”)
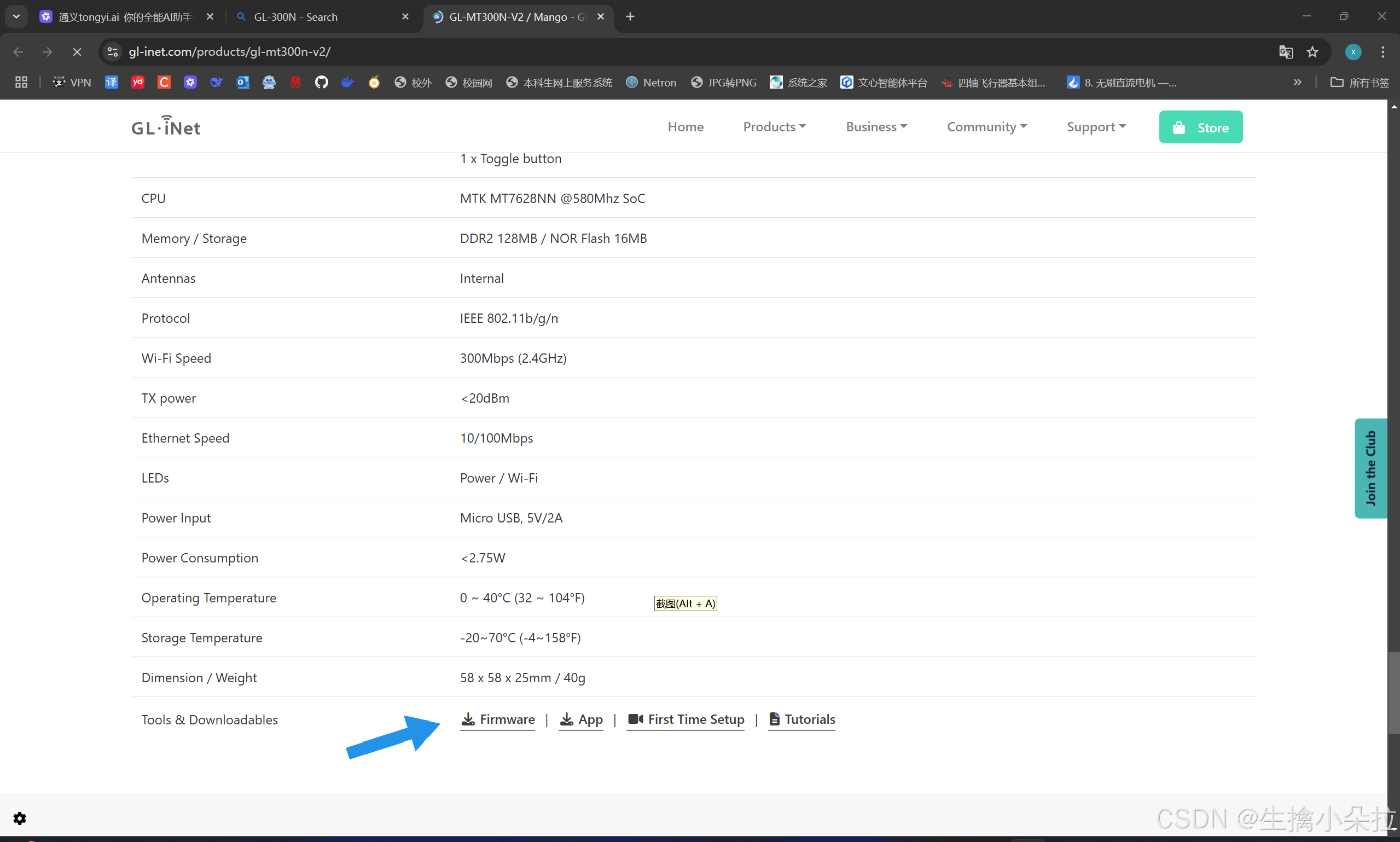
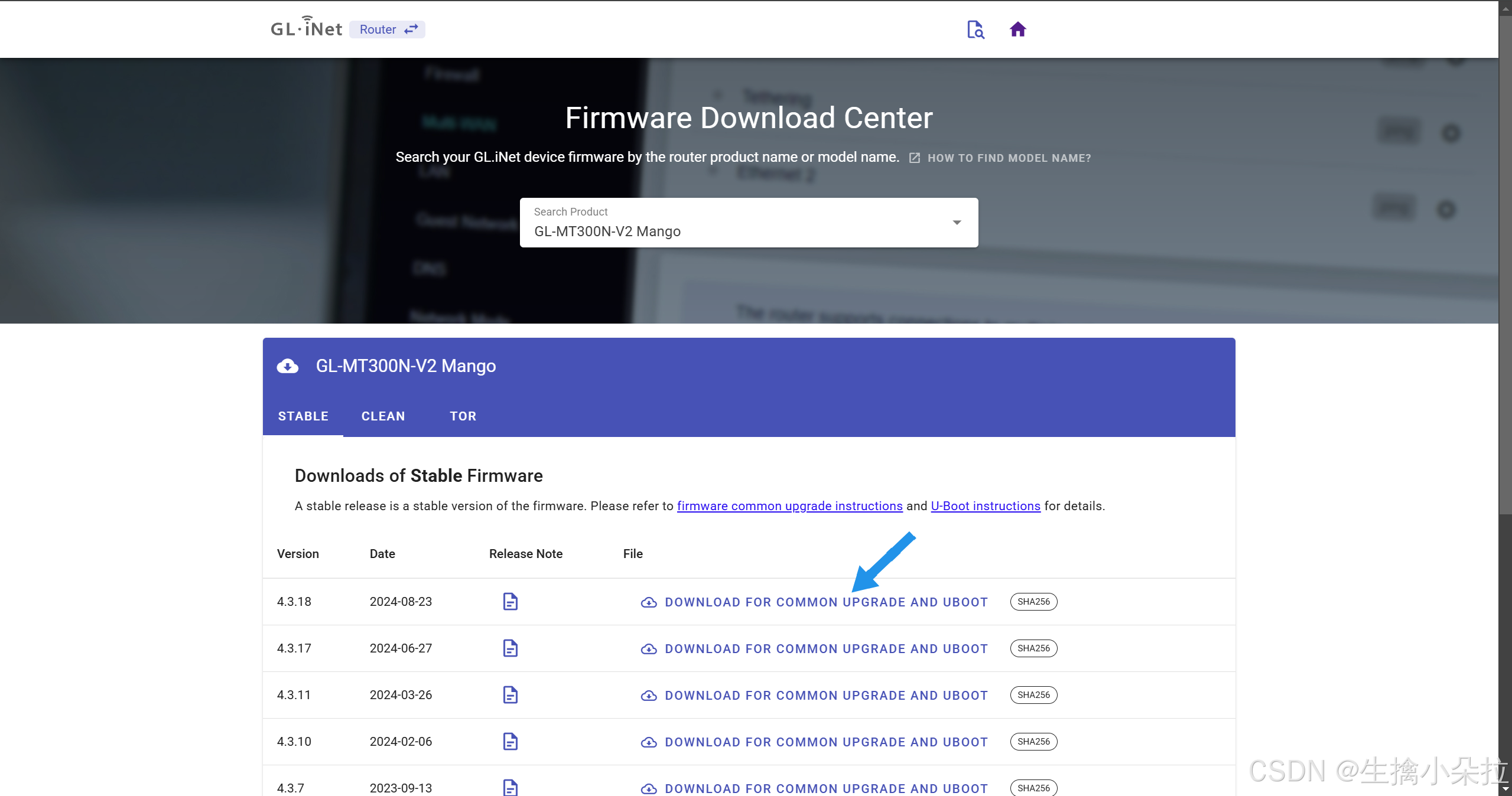
选择最新版下载,下载后文件名为openwrt-mt300n-v2-4.3.18-0823-1724399860.bin
2.烧录固件
LAN口连接电脑,按住Reset键,上电。
直至第一个和第二个灯都亮起且第三个灯不亮时(约5s),松开Reset键。
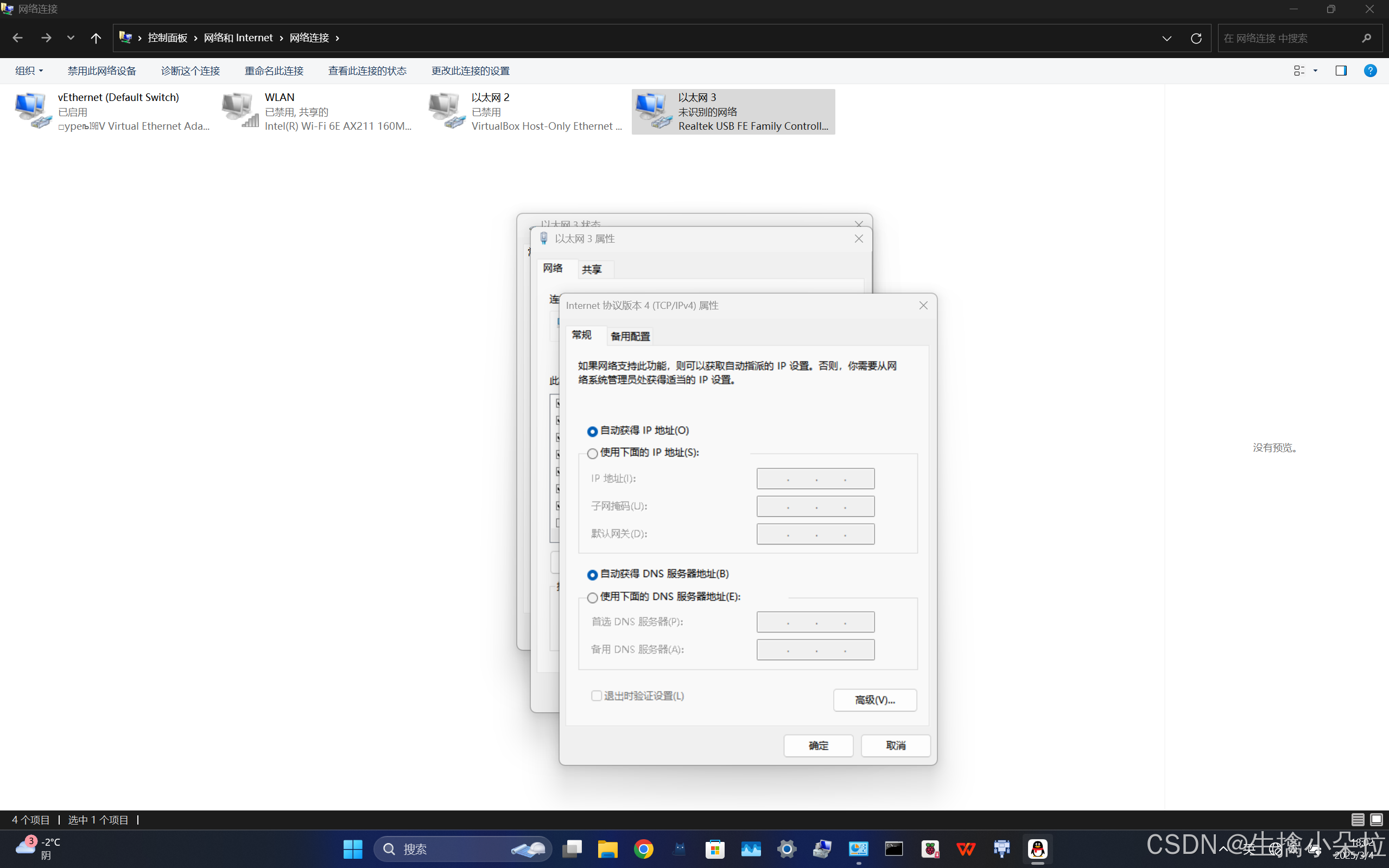
修改电脑网络,为防止IP冲突可以暂时禁用其他网络,修改后如图。
(修改的是电脑识别到的OpenWrt的IPv4,而不是修改电脑Wifi的IPv4或其它网络的IPv4)
(修改为192.168.1.2)

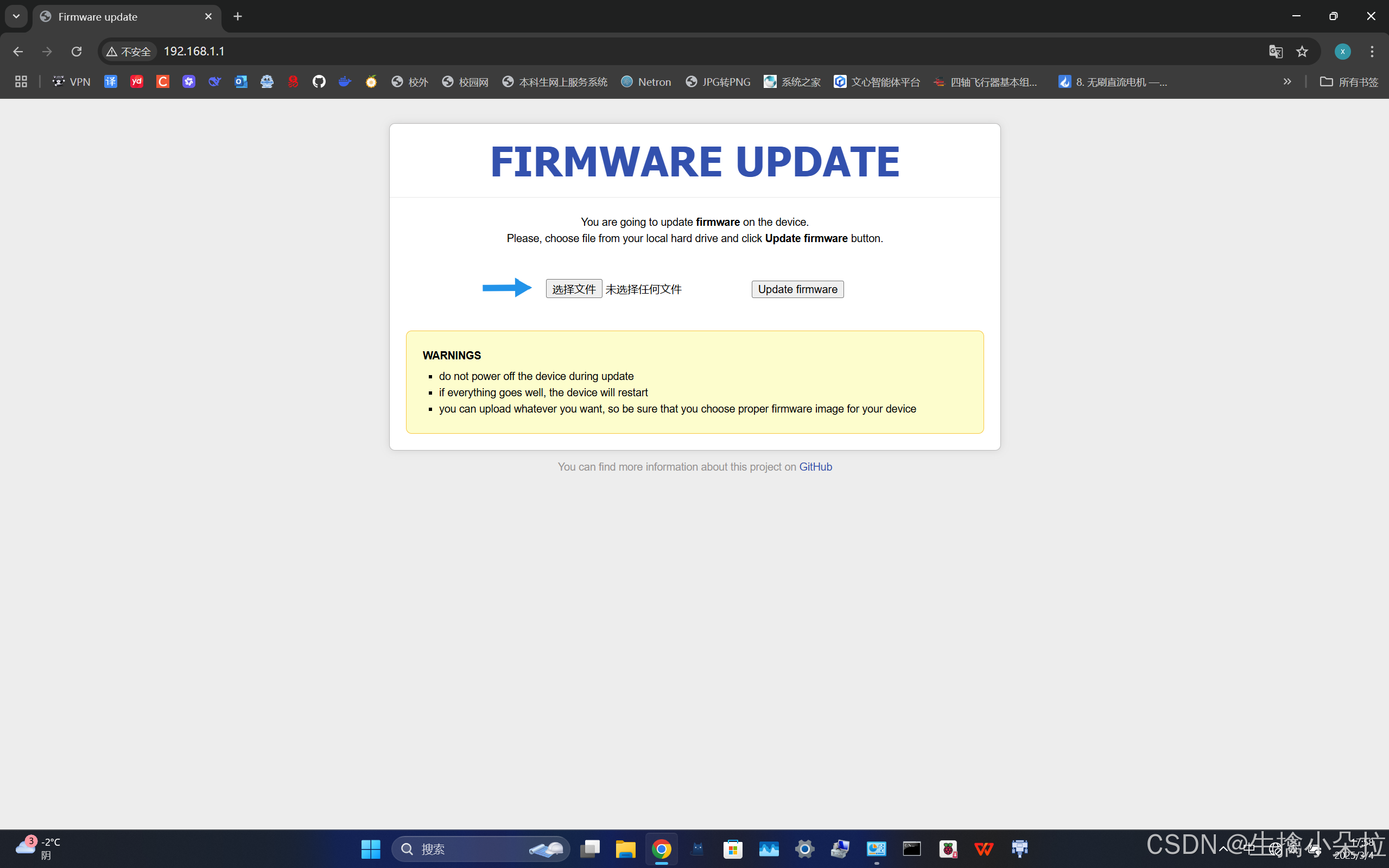
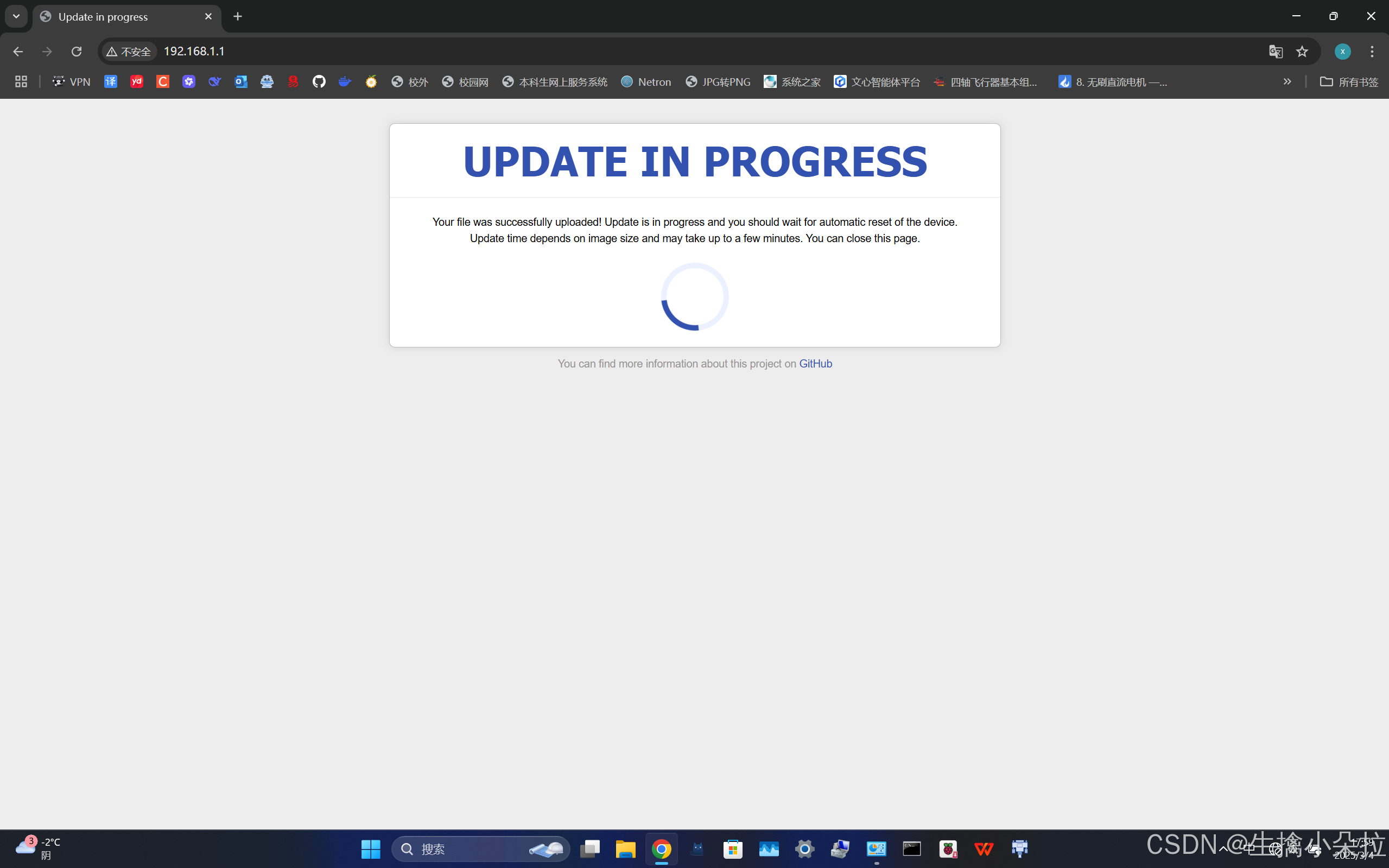
打开浏览器,输入192.168.1.1,进入如下界面
选择刚才下载的openwrt-mt300n-v2-4.3.18-0823-1724399860.bin作为烧录文件
开始烧录
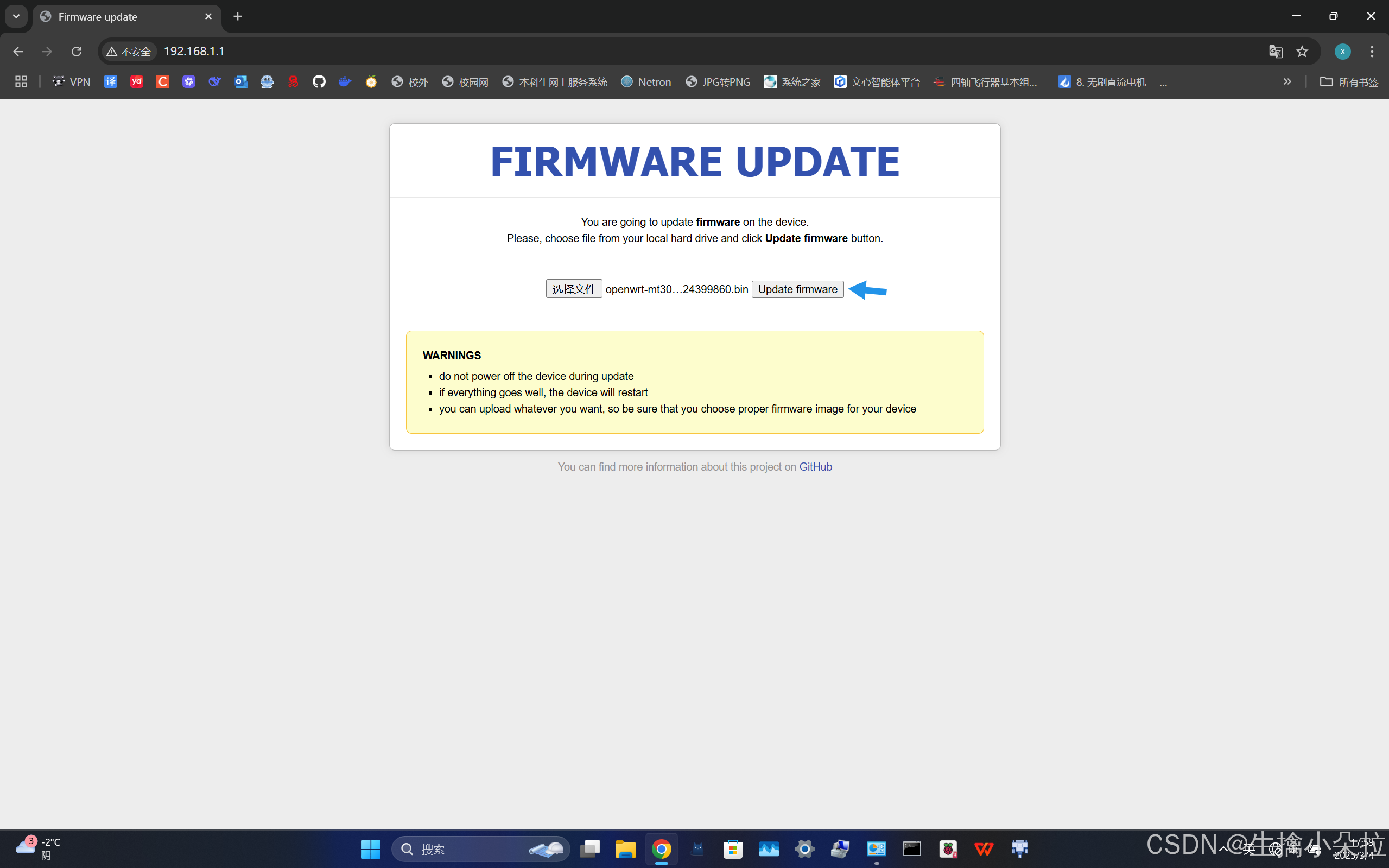
等待三分钟左右(下方页面不会提示烧录完毕,可以关闭)
3.初始化
将网络如图复原
并恢复其余网络连接,如WLAN等
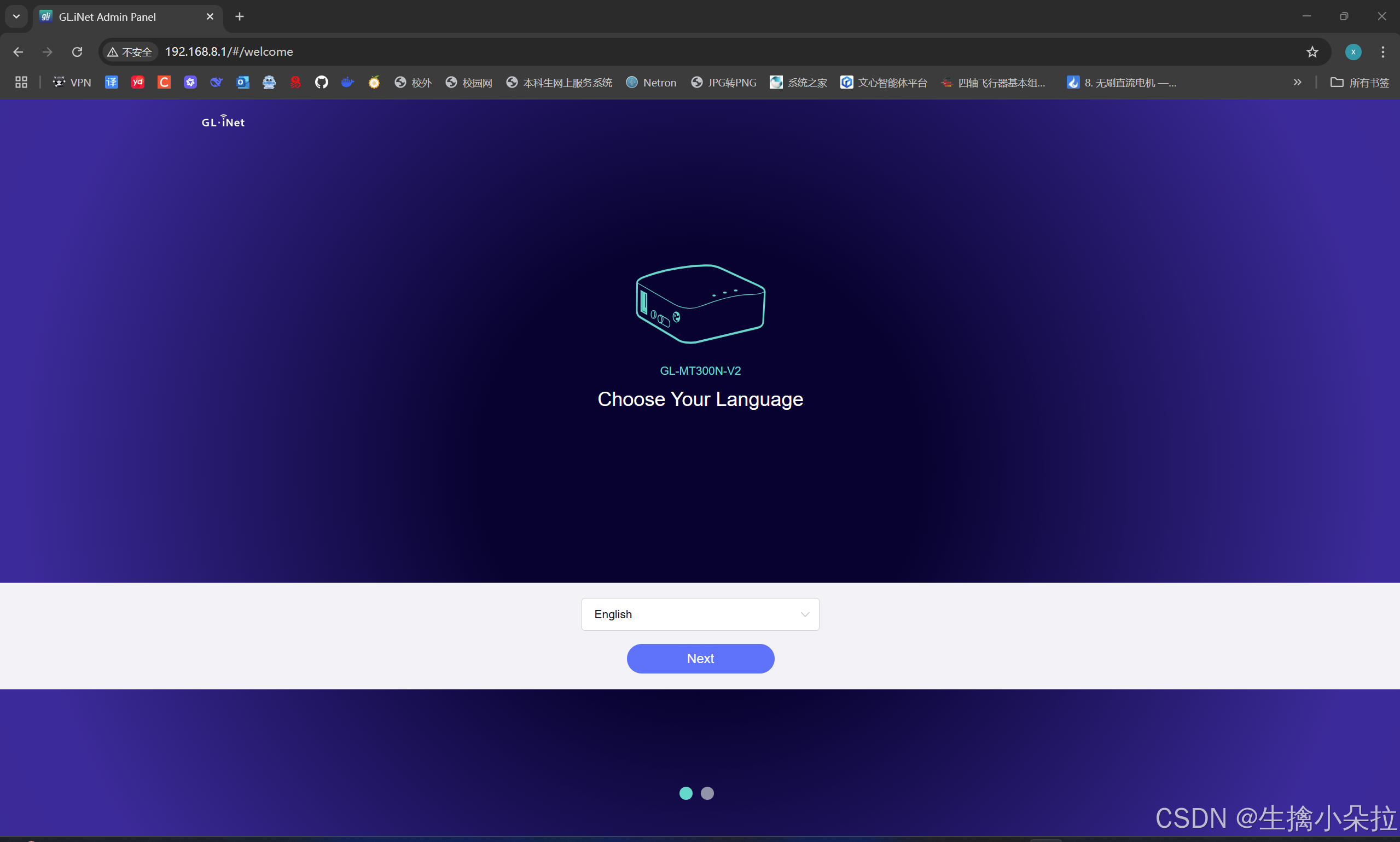
打开浏览器,输入192.168.8.1
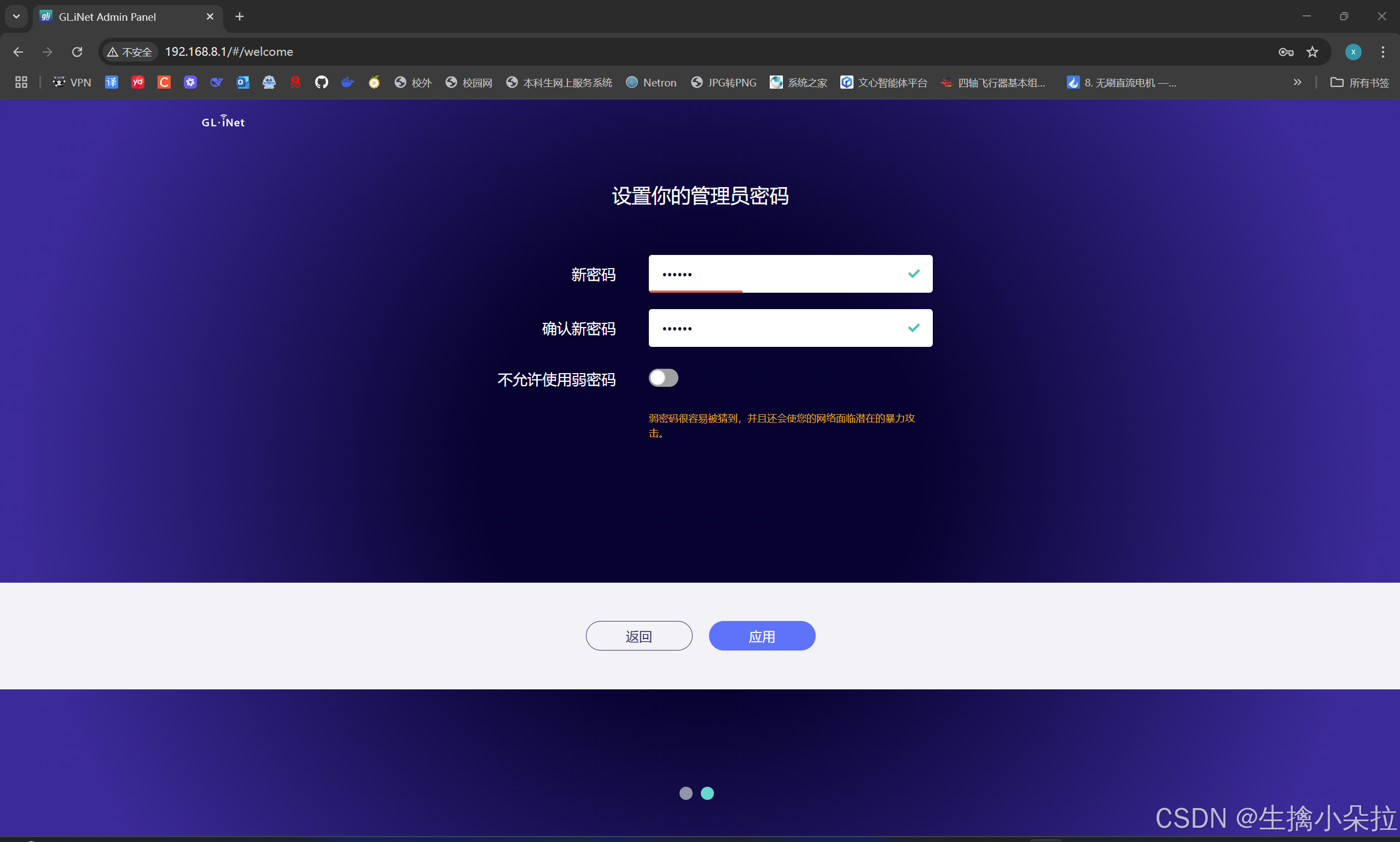
设置密码后点击“应用”
重新登录192.168.8.1,可以看到此时需要密码了
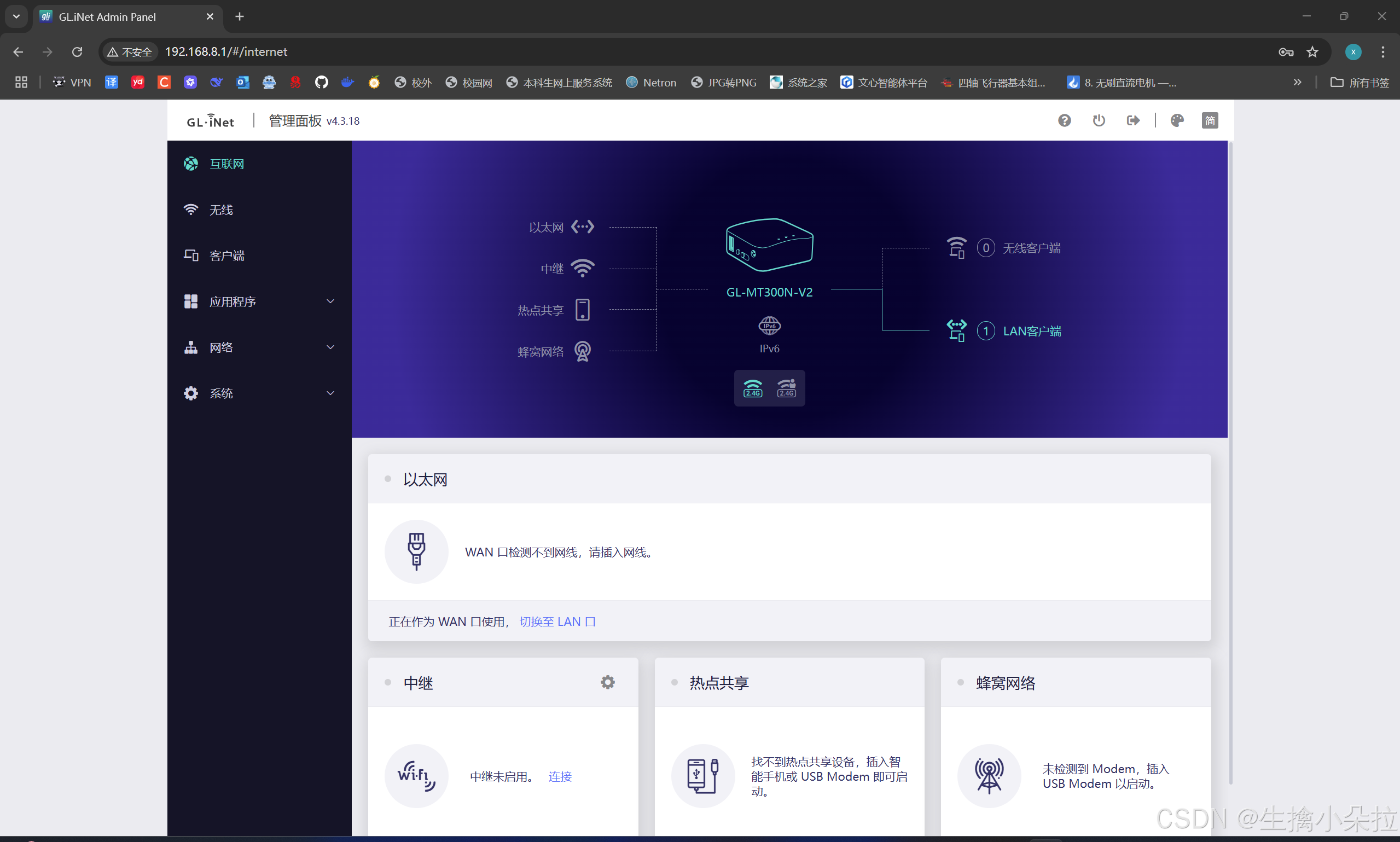
输入刚才自己设置的密码,登入管理界面

















06-03
 6770
6770
6770
07-28
6719
6719
03-27

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









