







转载自:光谱反射率基础
一、光谱反射率概念
当光源照射到物体表面,物体会对不同波长的电磁波产生选择性反射,光谱反射率是指在某波段被物体反射的光通量与入射到物体上的光通量之比,是物体表面的本质属性。光谱反射率是物体本身对颜色的表征,不仅全面地记录了物体的颜色信息,而且也是物体表面材质的表示方式。
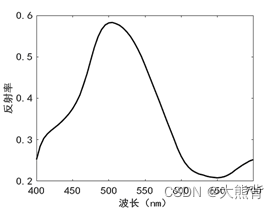
通常测量光谱反射率的仪器是分光光度计。下图是根据分光光度计所测得的Macbeth经典色卡的光谱反射率曲线之一,可以发现光谱反射率曲线一般都是连续且平滑的,可见光的范围一般为380nm-780nm,但是由于普通的彩色数码相机只能捕获红绿蓝三色波段信息,并且只覆盖400-700nm的波段范围,所以我们取400-700nm 可见光波段范围的光谱反射率。
二、 相机成像模型
光谱反射率的重建都是基于相机成像模型建立的,如图所示,光源照射到物体上形成入射光,经过物体表面对入射光的吸收、漫反射、镜面反射等最后形成反射光:
(1)若反射光被人眼感知捕获,就会在人眼形成综合视觉,这也是我们看清物体的原因;
(2)若反射光通过各种各样的滤光片,再通过相机获得系统响应值,这样的系统称为多光谱成像系统,由于该系统滤光片的设置比较复杂,限制了该系统的应用;
(3)若反射光直接由彩色相机捕获,形成RGB图像,获得系统响应值,这样的系统是基于RGB图像的相机成像系统,由于此系统分辨率较高、成像速度快、价格便宜等优点,所以该系统现在应用最为广泛。

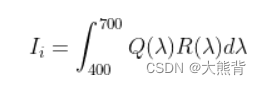
假设彩色数码相机的光电转换函数为理想的线性模型,设P(λ)为照明光源的光谱功率分布函数,R(λ)为物体表面的光谱反射率,C(λ)为相机的光谱灵敏度函数,包含了相机光学系统的透射率和相机光学元件的光谱敏感函数,λ 的变化范围为 400-700nm,则对应一个像素点或者一个样本的数码相机第 i 个通道的响应值为输出可以表示为如下积分:

上式中bi和ni分别为相机的暗电流噪声和系统整体噪声,其中ni为均值为0的高斯白噪声,可以通过去除暗电流和校正光照不均匀性来消除噪声。P(λ)和C(λ)都为与系统相关的光谱函数,其具体的光谱函数是很难测定得出的,由于这几个函数都是与反射率R(λ)直接相乘的关系而且都是并列的。因此,为了更好的表达光谱重建的过程我们将这两个函数合并为单一的光谱响应函数Q(λ),即Q(λ)=P(λ)C(λ)。在忽略噪声参数后,可以简化为:
上式更加简洁的表达了物体表面的光谱反射率转化为相机响应的这一过程。在实际的系统中,对这样的系统建模一般采取离散取点的方式来建立模型。考虑到所选可见光波长范围是400nm-700nm,光谱反射率曲线一般是光滑连续变化的,若以10nm的采样间隔点来表示光谱反射率曲线,从而将光谱反射率R(λ)表示为一个N×M维的向量R,对应的N为31,代表波段通道数,M代表样本数量。由于系统的相机响应由各个通道的响应值组成,Ii表示为M×C维的向量,其中C代表所用光源数量,i是系统中相机的光谱通道数,这里由于我们使用的是彩色数码相机,因此M的取值是3,分别代表R,G,B三个通道。经过简化,积分形式可以写为如下矢量矩阵的形式:
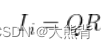
上式中Q为包含了照明光源的光谱功率分布函数P(λ)和相机的光谱敏感函数C(λ)的相机整体光谱响应函数矩阵,是一个C×N的矩阵;I是像素点或样本的响应值矢量,是一个C×M的矩阵;上式就是反射率重建研究的模型的基础。光谱反射率重建就是建立反射率R与响应值I之间的关系,使得能够通过下式从低维度的相机响应值I重建得到高维度的光谱反射率Rrec。

上式中Rrec是重建样本的光谱反射率,M是由训练样本数据通过反射率重建算法计算得到的从相机响应值到光谱反射率之间转换的矩阵,I是重建样本的相机响应值。光谱反射率重建的精度取决于求解转换矩阵M的方法,求解得到的转换矩阵越精确,那么重建出来的反射率与真实反射率之间的差别也就越小,该重建算法也就越好。















 8035
8035











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









