







项目简介
x5 转接板,是基于RDK X5 导航盒的关键部件之一,主要将X5 的硬件接口扩展出来,并增加 485,陀螺仪,oled显示屏等功能,在未来的导航盒上可以适用不同的外设和传感器。
项目功能
x5 转接板设计思路是为小型、低烈度的机器人设计导航盒,尽可能兼容不同的机器人平台,在接口方面采用三种串行通讯协议,CAN,485,USB为主流通讯,同时保留常用的接口,I2c,SPI,TTL,GPIO等。
x5 转接板主要功能有:
- stm32单片机辅助X5 驱动部分外设,如OLED屏幕,BMI088,UPS电源信息采集等。
- 采用IP5310芯片用于UPS管理,可以给X5 进行电池供电,电压,电流采集显示,电源保护等功能。
- 板载BMI088 陀螺仪芯片,最终由X5 直驱,并在ROS上使用惯导数据。
- 采用HS8836A USB-HUB 芯片,用于USB2.0设备的扩展,如麦克风阵列,网口,串口,激光雷达,TOF相机等。
- 采用OLED显示屏,stm32 控制,主要用于电压功率显示,IP显示,设备状态显示等,在导航过程中兼职表情交互,此功能为了过度触摸屏,在后期将考虑采用X5直驱触摸液晶屏,将有更丰富的表情交互。
- 预留无人机上的GPS模块接口(带地磁计),可以直接使用,并由X5直接读取;主要用于室外导航使用
- 预留两路PWM舵机,用于云台控制。
- 预留音频编码口,主要用于麦克风阵列编码器,实现DOA声音定位 功能
- 预留USB转M2转接板的固定位,用来数据采集存储,支持m2 2230,2242,2260硬盘。
- RDK X5 板载canfd接口并自带收发器,在转接板预留转接的位置,保持导航盒的一致性。
- RDK X5 板载两路MIPI 摄像机接口,后期将用于双目相机功能的实现。
项目参数
转接板参数:
- 单片机stm32G031U8G6
- IMU:BMI088
- 电源管理 IP5310
- RS485 芯片 COSMAX13487EESA
- USB-HUB HS8836A
- 降压芯片 ams11117
- 芯片驱动方案,stm32转接/x5 直驱
转接板接口: - 4路 usb 2.0
- 1路485
- 1路canfd
- 1路风扇口
- 1路 OLED屏接口 (stm32)
- 1路 串口
- 1路 充电口
- 1路 烧写口
- 2路 PWM舵机口/AD口
- 1路 音频编码口
- 1路 usb硬盘口
- 1路 GPS口(带电子指南针接口)
- 2路 I2C
- 2路SPI
- 若干 GPIO
原理解析(硬件说明)
x5 转接板由以下部分组成,电源部分、STM32部分、USB-HUB部分、传感器和接口拓展部分
-
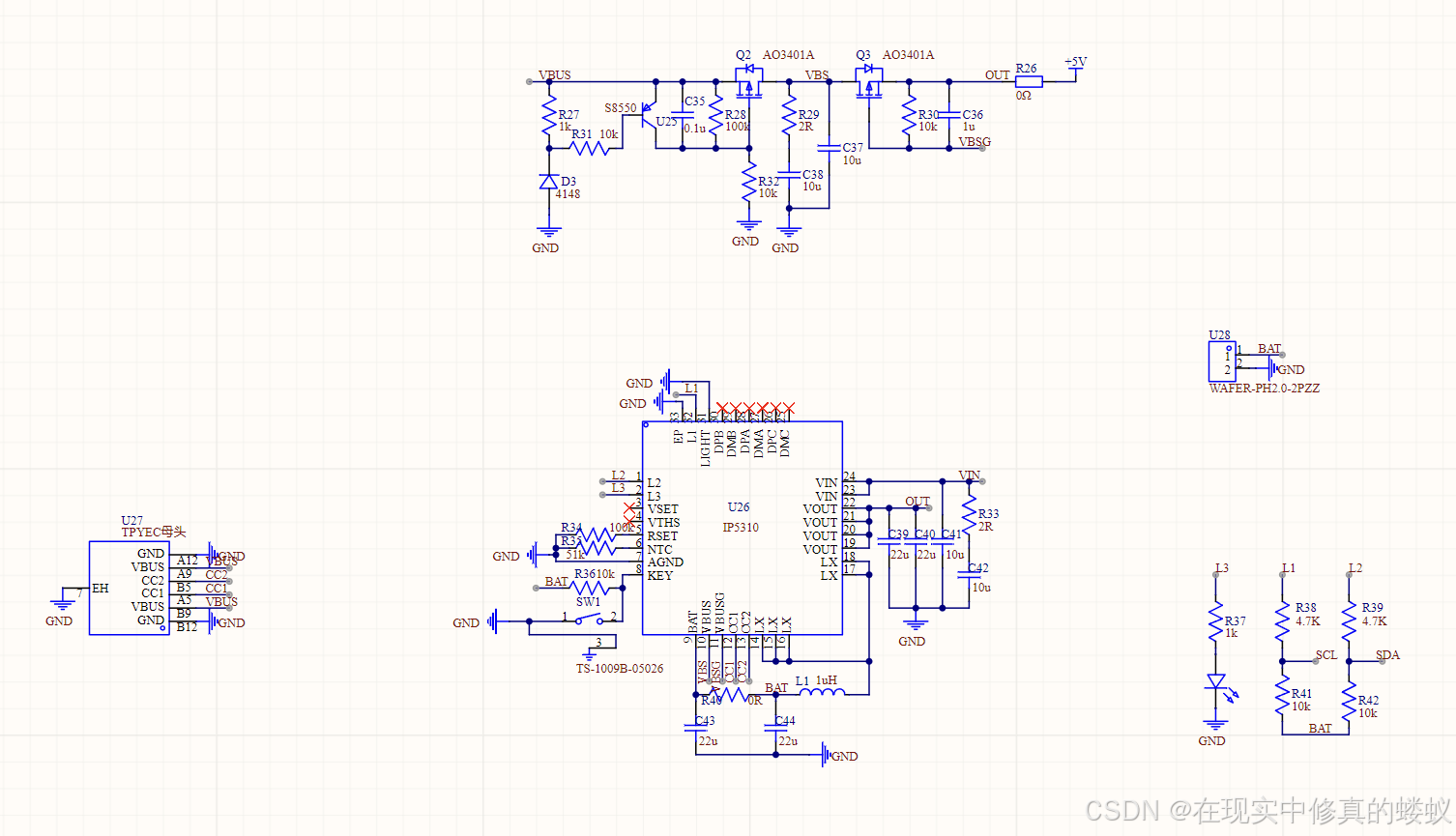
电源电路:
- 双击按键控制电池供电,X5上电开机,同时给其他传感器供电,显示屏显示电量信息,工作电流,以及X5的开机状态和网络信息,关机亦然。
- 双击按键控制电池供电,X5上电开机,同时给其他传感器供电,显示屏显示电量信息,工作电流,以及X5的开机状态和网络信息,关机亦然。
-
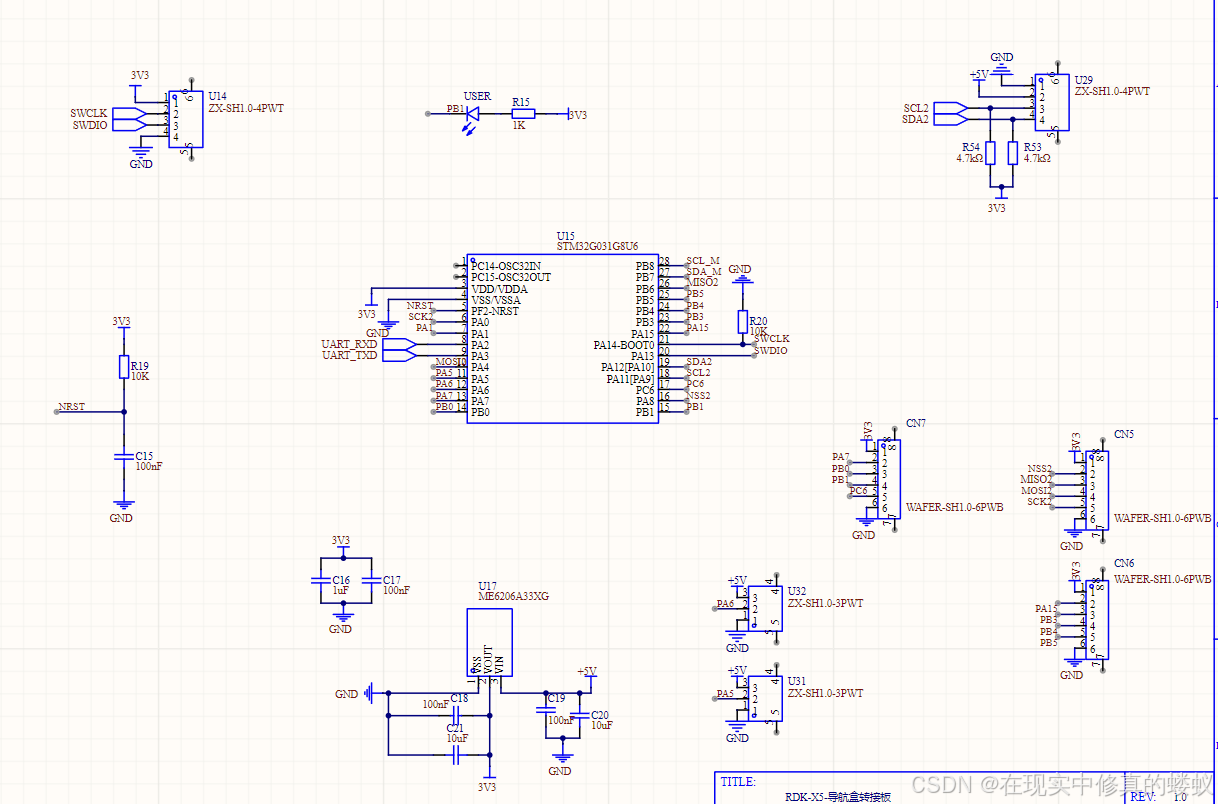
stm32单片机电路:
- stm32 主要是辅助X5完成一些采集工作,显示屏控制,bmi088的驱动,舵机控制等功能,AD采集等。
![[Pasted image 20241115234704.png]]
- stm32 主要是辅助X5完成一些采集工作,显示屏控制,bmi088的驱动,舵机控制等功能,AD采集等。
-
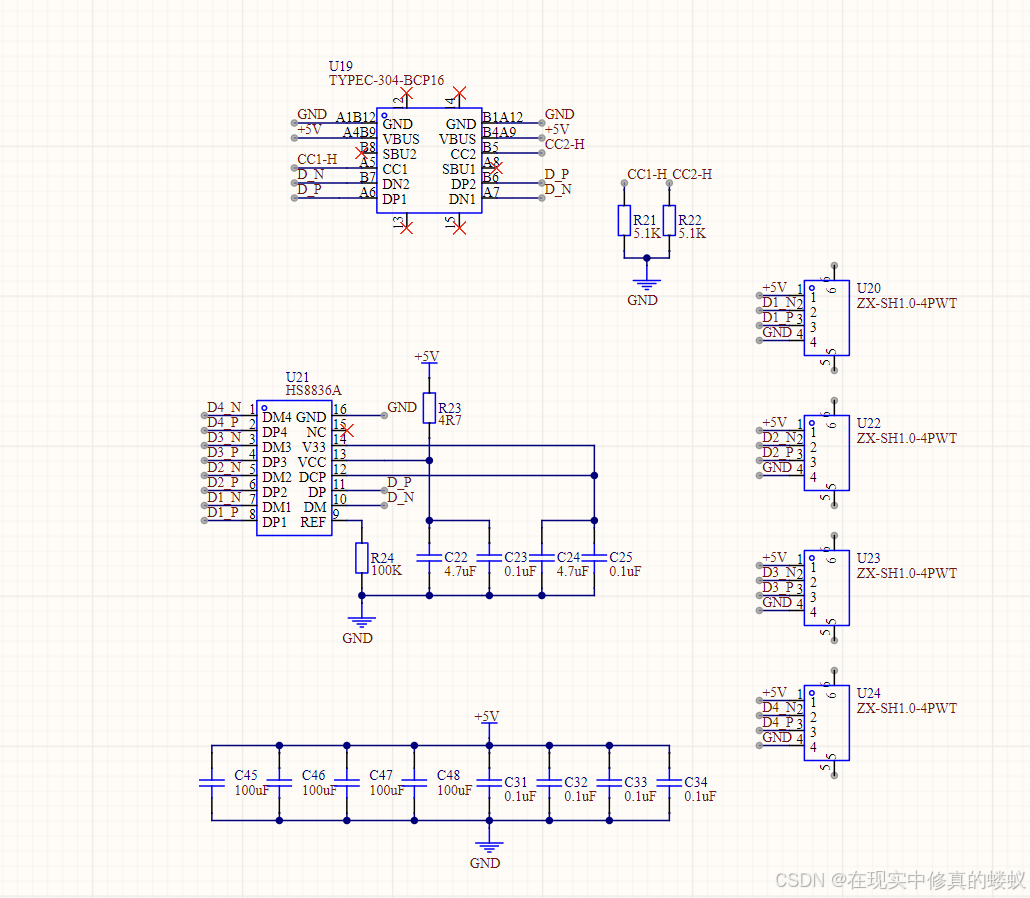
USB-HUB电路:
- 增加USB-HUB为了扩展更多的USB2.0设备,如串口,网口,麦克风等,USB可转换很多接口,大部分接口只需USB2.0即可满足,通过一个USB3.0 转出来4个USB2.0口,在特定机器人中需要很多个TTL串口,后期选型CH348做一USB转8串口的扩展板,满足多串口的需求
![[Pasted image 20241115234528.png]]
- 增加USB-HUB为了扩展更多的USB2.0设备,如串口,网口,麦克风等,USB可转换很多接口,大部分接口只需USB2.0即可满足,通过一个USB3.0 转出来4个USB2.0口,在特定机器人中需要很多个TTL串口,后期选型CH348做一USB转8串口的扩展板,满足多串口的需求
![[Pasted image 20241115234602.png]]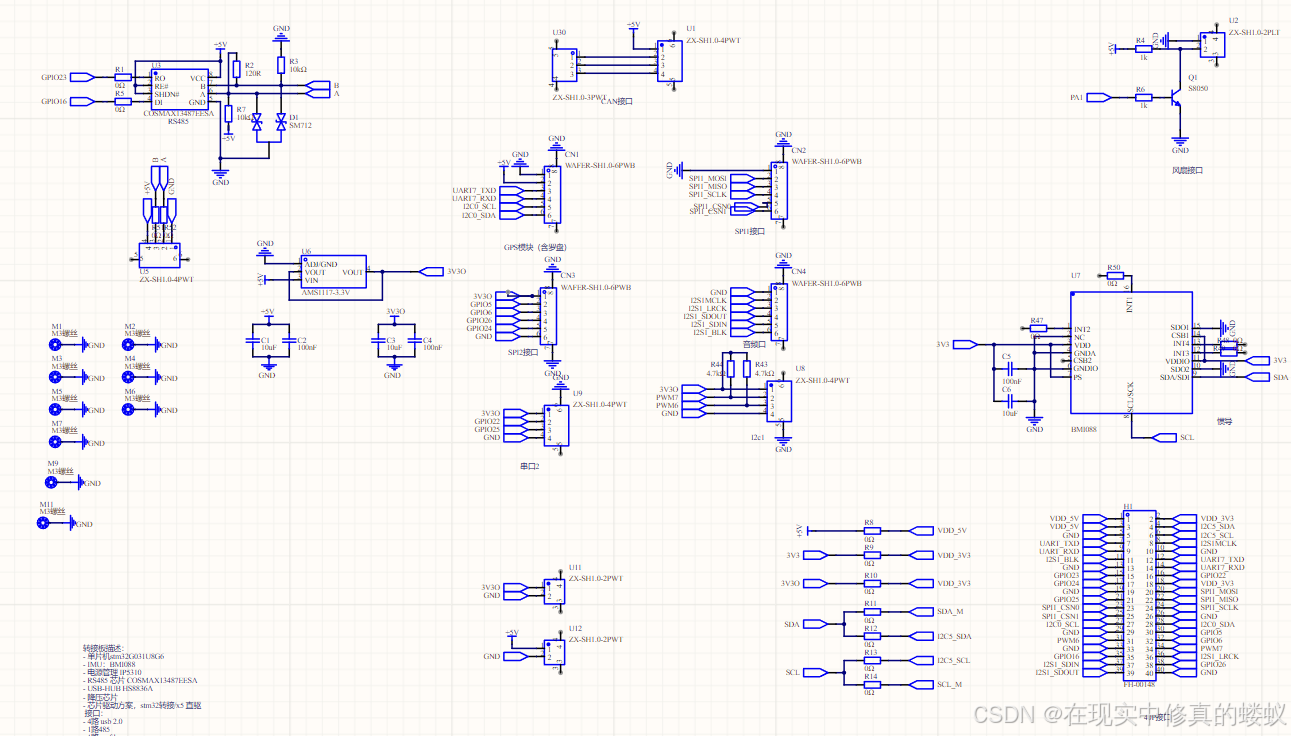
- 传感器和接口拓展电路
- 为了能达到最大的利用率,几乎引出来所有的接口,满足后期的GPS模块,麦克风阵列,电子指南针,电子罗盘,云台舵机,电机驱动,485设备,还有M2硬盘。
![[Pasted image 20241115234827.png]]
- 为了能达到最大的利用率,几乎引出来所有的接口,满足后期的GPS模块,麦克风阵列,电子指南针,电子罗盘,云台舵机,电机驱动,485设备,还有M2硬盘。
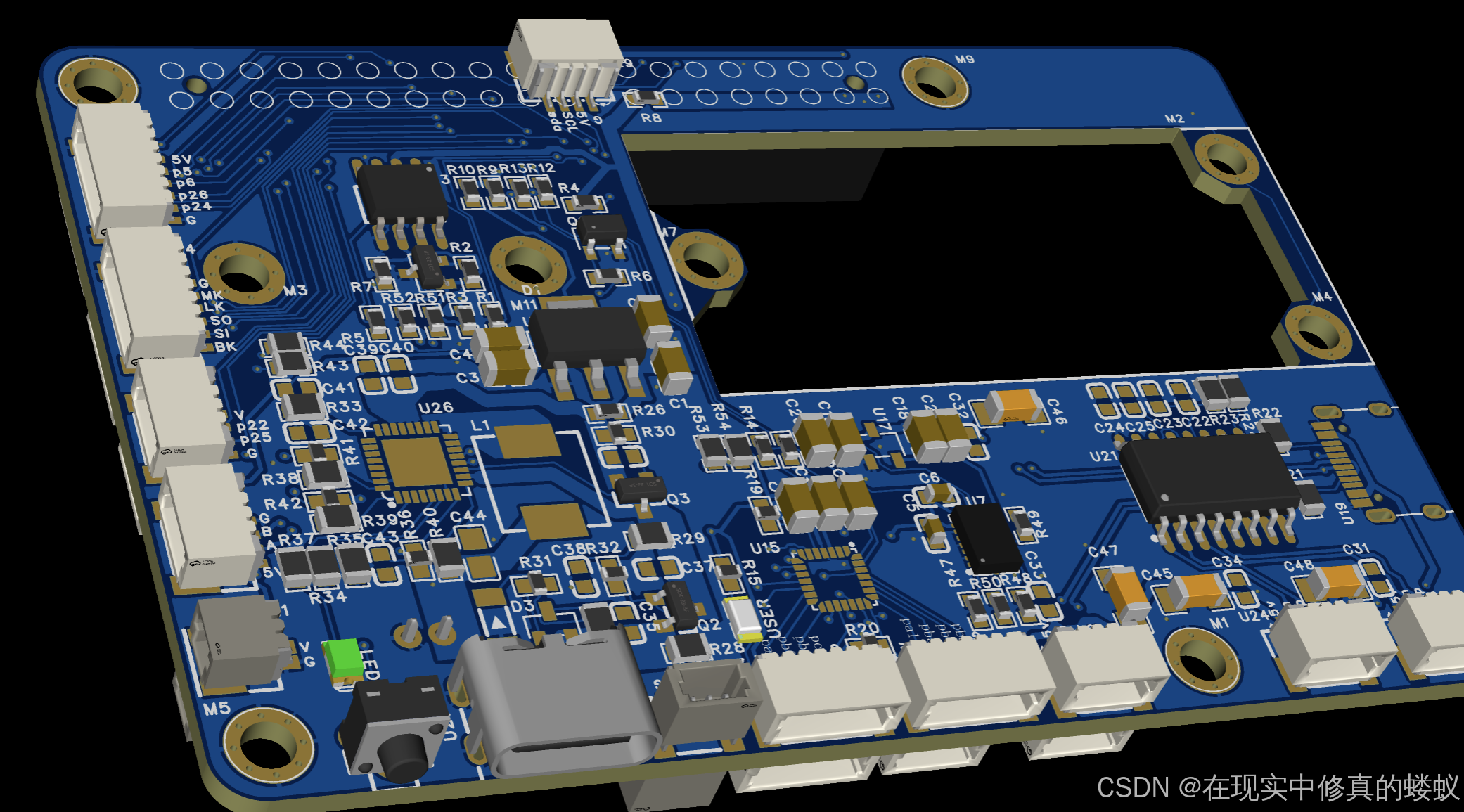
- pcb电路图
制作心得
接触RDK X5的时间越长,越能体会到X5 在机器人方面的优势,制作转接板的过程中推翻了好几种方案,最后选择简单易用,快速落地的硬件方案,放弃了快充,放弃USB3.0HUB,放弃板载GPS,放弃了触摸屏,同时为了做的小巧便捷放弃了大屏。后期转接板调试完成后,将在立创开源,敬请期待……


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









