






【物理】实验:验证机械能守恒定律
自由落体验证机械能守恒定律
实验目的
验证机械能守恒定律。
实验原理
求出做自由落体的物体的重力势能的减少量和动能的增加量。
在实验误差允许范围内,若二者相等,则说明机械能守恒,从而验证了机械能守恒定律。
实验器材
重物、打点计时器、交流电源、纸带、刻度尺、铁架台(带铁夹)。
注意:不需要秒表和天平。所有需要使用打点计时器的实验均不需要秒表。且由于此实验中,是根据 \(m \mathrm g h_{AB} = \dfrac 1 2 m({v_B}^2 - {v_A}^2)\) 计算的,此时两遍都可以约去 \(m\),所以 \(m\) 测得的结果精确与否对实验无影响。
实验过程

【安装器材】
讲打点计时器固定在铁架台上,用导线将打点计时器与电源相连。
【打纸带】
用手竖直提起纸带,使重物停靠在打点计时器下方附近。先接通电源,再松开纸带,让重物自由下落,打点计时器就在纸带上打出一系列点,取下纸带,换上新纸带重打 \(3\sim 5\) 条。
注意:
- 需要用手竖直提起纸带,而不能用手在下方托住重物,是为了避免纸带在下落的过程中跟打点计时器之间有摩擦生热。
- 重物要停靠在打点计时器下方附近,目的是为了多打点。
- 打 \(3\sim 5\) 条纸带的目的是保证打点的纸带上点较为清晰。
【数据处理】
选择点迹清晰的纸带,验证机械能守恒定律。
数据处理
方案一
利用起点和第 \(n\) 点计算:
- 选择第 \(1、2\) 点间举例最接近 \(\pu{2 mm}\) 的纸带(在 \(\pu{50 Hz}\) 的前提下,根据 \(y = \dfrac 1 2 \mathrm g t^2\) 可知此时 \(y = \pu{2 mm}\))。
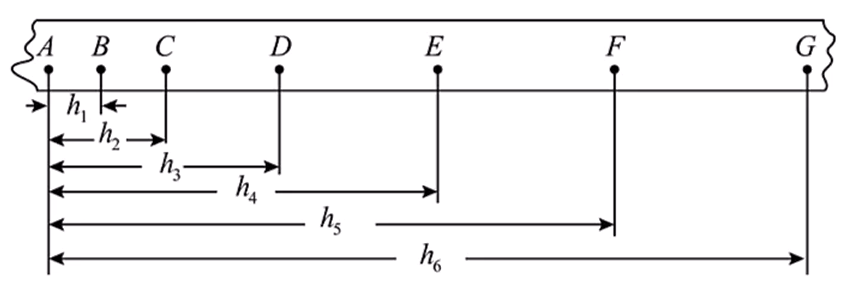
- 测出从起点到第 \(n\) 个点的距离 \(h_n\)。
- 计算第 \(n\) 个点的瞬时速度,即 \(v_n = \dfrac x {2T}\)。以上图第 \(n\) 个点为 \(F\) 点为例:此时 \(v_n = \dfrac{h_6 - h_4}{2T}\)。
若在误差范围内,\(m \mathrm g h_n\) 与 \(\dfrac 1 2 m {v_n}^2\) 相等,则验证了机械能守恒定律。
方案二
任取两点 \(A、B\) 计算:
- 测出 \(h_{AB}\)。
- 测出 \(v_A、v_B\)。
若在误差范围内,\(m \mathrm g h_{AB}\) 与 \(\dfrac 1 2 m {v_B}^2 - \dfrac 1 2 m {v_A}^2\) 相等,则验证了机械能守恒定律。
方案三
原理:
根据机械能守恒定律的式子 \(m \mathrm g h = \dfrac 1 2 m v^2\) 可知 \(\dfrac{v^2}2 = \mathrm g h\)。所以只需要画出 \(\dfrac {v^2} 2 - h\) 图象求解。
图象法:
- 测量从起点到剩余各点的下落高度 \(h\),并计算对应速度 \(v\)。
- 以 \(\dfrac {v^2} 2\) 为纵轴,\(h\) 为横轴,根据数据做出 \(\dfrac{v^2}2 - h\) 的图象。
若在误差范围内,图象是一条过原点且斜率为 \(\mathrm g\) 的直线,则验证了机械能守恒定律。
注意事项
- 安装打点计时器时,要使其两限位孔在同一竖直平面以减少摩擦。
- 重物的密度要大。目的:体积相同时,密度越大,重力越大,更能满足重力远大于空气阻力。
- 释放前提着纸带,而不是拖着重物。目的:减少纸带与打点计时器之间的摩擦。
- 重物靠近打点计时器。目的:多打点。
- 先接通电源,再松开纸带让重物下落。
- 计算速度不可用 \(v = \sqrt{2 \mathrm g h}\) 或 \(v = \mathrm g t\)。原因:这两个公式相当于已知机械能守恒求 \(t\),但此实验是为了验证机械能守恒。
- 实验仪器不需要秒表和天平。
误差分析
若 \(\Delta E_k < |\Delta E_p|\):说明存在空气阻力或摩擦力。
若 \(\Delta E_k > |\Delta E_p|\),有两种可能原因:
- 利用方案 \(1\) 验证时,先释放纸带,后接通电源。此时会导致纸带上起点初速度不为 \(0\),根据 \(\Delta E_k = \dfrac 1 2 m {v_n}^2 - \dfrac 1 2 m {v_0}^2\) 可知结果偏大。
- 交流电的频率变小了。根据 \(v = \dfrac{x}{2T}\) 和 \(T = \dfrac 1 f\) 可知,\(f\) 变大 \(v\) 变大,会导致 \(\Delta E_k\) 变大。
其它方法验证机械能守恒定律
光电门测速
遮光条通过光电门的时间很短,设遮光条的宽度为 \(d\),则门处的瞬时速度近似等于平均速度,即 \(v = \dfrac d t\)。
注意:遮光条的宽度不能太长,遮光条通过光电门的速度不能太慢。若 \(d\) 太长,\(v\) 太慢,会导致时间 \(t\) 变长,会使得近似不再准确。
竖直双物块模型
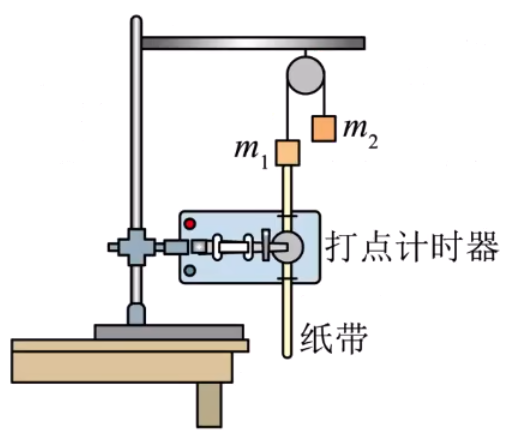
如图所示,\(m_2 > m_1\),释放纸带后,物块 \(2\) 向下移动,物块 \(1\) 向上移动,且由于绳子不可伸长,所以两物块在竖直方向移动的距离相等,且两物块时刻保持共速。
那么整个系统机械能守恒,则一定有 \((m_2 - m_1) \mathrm g h = (m_1 + m_2)\dfrac{v^2}2\)。
那么要使用该系统验证机械能守恒定律,需要利用天平测出两物块质量 \(m_1,m_2\),然后利用刻度尺测出起点到第 \(n\) 个点的距离 \(h\),用均速法计算出第 \(n\) 个点的瞬时速度,代入上述关系式即可验证机械能守恒。
注意:在双物块模型中,物块质量不能约去,所以不能不测量。
斜面双物块模型
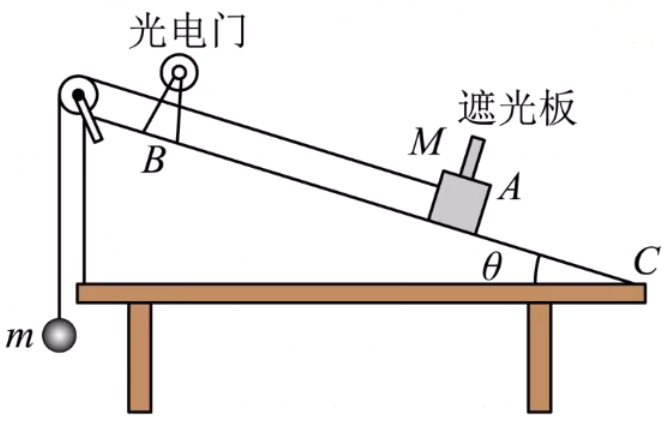
如图所示,物块的质量是 \(M\) 小球质量是 \(m\),小球竖直向下运动,物块沿着斜面向上运动,二者运动过程中速度相等,且物块沿斜面向上运动的距离与小球向下运动的距离相等。
假设物块从 \(A\) 到 \(B\) 沿斜面向上运动的距离为 \(d\),则小球在运动过程中重力势能减少了 \(m\mathrm g d\),物块在运动过程中重力势能增加了 \(Mgd \sin \theta\)。根据机械能守恒有 \(m\mathrm gd - M \mathrm g d \sin \theta = \dfrac 1 2 (m + M){v_B}^2\)。
分别计算出左右两边的式子,若二者在误差范围内相等,则验证了机械能守恒定律。
注意:在这种模型下,同样需要将 \(M\) 和 \(m\) 准确测出。
竖直圆模型
如图所示,设小球从释放到下落的高度为 \(h\),那么对于小球有机械能守恒 \(m \mathrm g h = \dfrac 1 2 m {v_A}^2\),即 \(\mathrm g h = \dfrac 1 2 {v_A}^2\)。
误差分析:此时由于 \(v_测 = \omega L\),其中 \(L\) 表示半径 \(R\) 加上部分纸带的长度,\(v_实 = \omega R\),所以 \(L > R\),所以 \(v_测 > v_实\),所以计算得到的动能偏大。改进:由上述分析可知可利用 \(v_实 = \dfrac{v_测 R}{L}\) 作为测得的实际速度。
例题
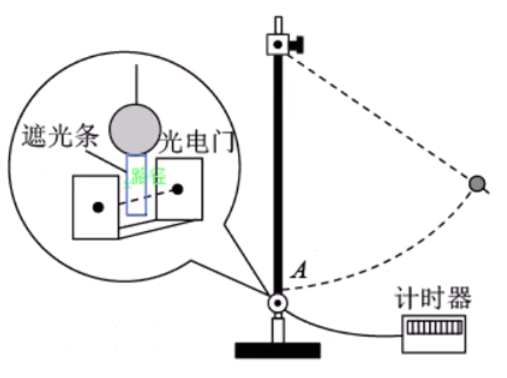
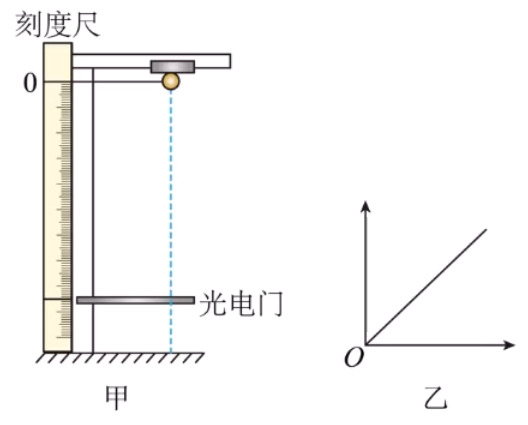
晓强利用如图甲所示的装置完成了机械能守恒定律的验证,将体积较小的球由一定高度处静止释放,经过一段时间,小球通过固定在下侧的光电门,光电门记录了小球挡光时间 \(\Delta t\);然后,多次改变光电门到释放点的距离 \(h\),将小球仍由原来的位置静止释放,重复操作多次,记录多组小球的挡光时间。
-
实验时,下列正确的是()
A. 应选择直径较大的铝球
B. 应选择直径较小的钢球
C. 小球的释放点距离光电门越近越好
D. 小球的释放点到光电门的距离适当远些
-
如果小球的直径为 \(d\),则小球经过光电门时的速度是什么?如果重力加速度为 \(\mathrm g\),若小球下落过程中机械能守恒,则对应成立的关系式是什么?
-
如果利用得到的实验数据描绘图象,纵轴为 \(\dfrac 1 {{\Delta t}^2}\),横轴为 \(h\),如图乙,图线的斜率为 \(k\),若小球的机械能守恒,则重力加速度 \(\mathrm g\) 的表达式是什么。
分析:
对于 1,要使得求得的近似值更加准确,应该要让直径 \(d\) 较小,且为了满足重力远大于空气阻力,应该让小球密度较大,所以选择直径较小的钢球;同时为了让误差更小,在考虑释放点到光电门的距离 \(h\) 时,就要让误差值占据 \(h\) 的距离越小,所以 \(h\) 要尽可能大,即小球的释放点到光电门的距离应该适当远些。所以 \((1)\) 选 BD。
对于 2,根据光电门测速可知,若小球的直径为 \(d\),则小球经过光电门时的速度为 \(\dfrac d {\Delta t}\);当机械能守恒时,有 \(m \mathrm g h = \dfrac 1 2 m v^2\),由于题目未告诉小球的质量,所以考虑两边同时约去 \(m\),根据上一问可知 \(\mathrm g h = \dfrac 1 2 \left(\dfrac d {\Delta t}\right)^2\)。
对于 3,对于第 2 问的式子变形可知 \(\dfrac{2\mathrm g h}{d^2} = \dfrac 1 {{\Delta t}^2}\),即 \(\dfrac 1 {{\Delta t}^2} = \dfrac{2 \mathrm g}{d^2}h\),所以图乙中图象斜率 \(k = \dfrac{2\mathrm g}{d^2}\),那么 \(\mathrm g = \dfrac{kd^2}{2}\)。
注意:对于第二问第二小问,已知机械能守恒求关系式,若已知小球质量,则对应关系式需要包含 \(m\);若未知小球质量,则需要约去 \(m\)。















 3万+
3万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









