









 本文介绍了对抗训练的基本概念,包括对抗样本、对抗攻击、对抗防御和对抗训练。对抗训练通过在输入数据上添加扰动来提高模型的鲁棒性,特别是NLP领域的对抗训练,主要方法包括FGSM、FGM、PGD等。文章详细阐述了这些方法的原理、Pytorch实现以及它们在NLP任务中的应用和区别,强调了对抗训练在NLP中作为正则化手段的作用。
本文介绍了对抗训练的基本概念,包括对抗样本、对抗攻击、对抗防御和对抗训练。对抗训练通过在输入数据上添加扰动来提高模型的鲁棒性,特别是NLP领域的对抗训练,主要方法包括FGSM、FGM、PGD等。文章详细阐述了这些方法的原理、Pytorch实现以及它们在NLP任务中的应用和区别,强调了对抗训练在NLP中作为正则化手段的作用。
对抗训练
文章目录
- 对抗训练
- 1. 基本概念
- 2. Min-Max
- 3. NLP中的对抗训练思路
- 4. 主要方法介绍
- 4.1 FGSM(Fast Gradient Sign Method),ICLR 2015
- 4.2 FGM(Fast Gradient Method),ICLR 2017
- 4.3 PGD(Projected Gradient Descent),ICLR 2018
- 4.4 FreeAT(Free Adversarial Training),NIPS 2019
- 4.5 YOPO(You can Only Propagate Once),NIPS 2019
- 4.6 FreeLB(Free Large Batch Adversarial Training),ICLR 2020
- 4.7 SMART(SMoothness-inducing Adversarial Regularization),ACL 2020
- 4.8 VAT虚拟对抗训练,ACL 2020
在NLP数据竞赛中用到了对抗训练,颇有效果,总结了主要的几个对抗训练方法,其中用得比较多的还是FGM和PGD。
参考文章
https://www.spaces.ac.cn/archives/7234
https://wuwt.me/2020/11/06/adverisal-train-2020/
https://www.spaces.ac.cn/archives/6051
https://zhuanlan.zhihu.com/p/104040055
1. 基本概念
1.1 对抗样本
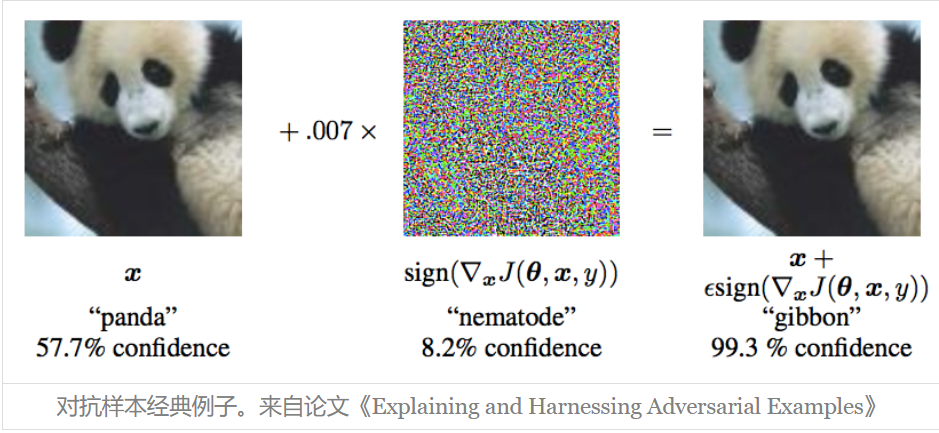
它首先出现在论文《Intriguing properties of neural networks》之中。简单来说,它是指对于人类来说“看起来”几乎一样、但对于模型来说预测结果却完全不一样的样本,比如下面的经典例子。
什么样的样本才是最好的对抗样本呢?对抗样本一般需要具备两个特点:
- 相对于原始输入,所添加的扰动是微小的;
- 能使模型犯错。
1.2 对抗攻击
想办法造出更多的对抗样本。
1.3 对抗防御
想办法让模型能正确识别更多的对抗样本。
1.4 对抗训练
所谓对抗训练,则是属于对抗防御的一种,它构造了一些对抗样本加入到原数据集中,希望增强模型对对抗样本的鲁棒性;同时,在NLP中它通常还能提高模型的表现,因此,NLP中的对抗训练更多是作为一种正则化手段来提高模型的泛化能力。
对抗训练的假设是:给输入加上扰动后,输出分布和原Y的分布一样。
2. Min-Max
2.1 核心公式
总的来说,对抗训练可以统一写成如下格式:

其中, D D D代表训练集, x x x代表输入, y y y代表标签, θ θ θ是模型参数, L ( x , y ; θ ) L(x,y;θ) L(x,y;θ)是单个样本的loss, Δ x Δx Δx是对抗扰动, Ω Ω Ω是扰动空间。这个统一的格式首先由论文《Towards Deep Learning Models Resistant to Adversarial Attacks》提出。
该公式分为两部分,一个是内部损失函数的最大化,一个是外部经验风险的最小化。
- 内部max是为了找到worst-case的扰动,也就是攻击。
- 外部min是为了基于该攻击方式,找到最鲁棒的模型参数,也就是防御,其中D是输入样本的分布。
2.2 分步理解
这个式子可以分步理解如下:
1、往输入 x x x里边注入扰动 Δ x Δx Δx, Δ x Δx Δx的目标是让 L ( x + Δ x , y ; θ ) L(x+Δx,y;θ) L(x+Δx,y;θ)越大越好,也就是说尽可能让现有模型的预测出错;
2、当然 Δ x Δx Δx也不是无约束的,它不能太大,否则达不到“看起来几乎一样”的效果,所以 Δ x Δx Δx要满足一定的约束,常规的约束是 ∥ Δ x ∥ ≤ ϵ ∥Δx∥≤ϵ ∥Δx∥≤ϵ,其中 ϵ ϵ ϵ是一个常数;
3、每个样本都构造出对抗样本 x + Δ x x+Δx x+Δx之后,用 ( x + Δ x , y ) (x+Δx,y) (x+Δx,y)作为数据对去最小化loss来更新参数 θ θ θ(梯度下降);
4、反复交替执行1、2、3步。
2.3 和GAN的区别
由此观之,整个优化过程是max和min交替执行,这确实跟GAN很相似,不同的是,GAN所max的自变量也是模型的参数,而这里max的自变量则是输入(的扰动),(这应该是和对抗训练和GAN最本质的区别。),也就是说要对每一个输入都定制一步max。
3. NLP中的对抗训练思路
3.1 核心总结
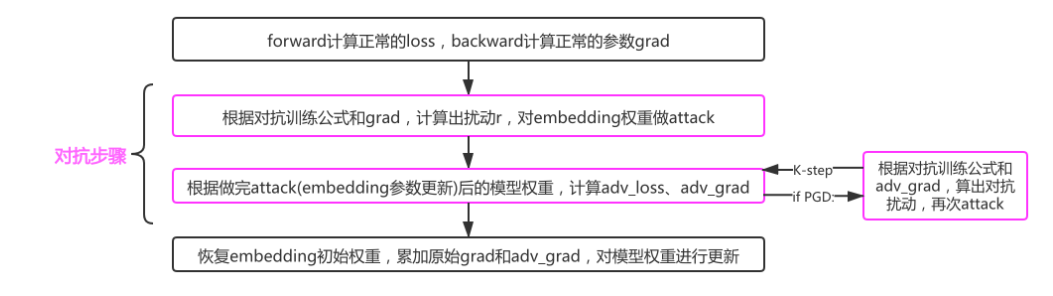
核心用一句话总结:用一句话形容NLP中对抗训练的思路,就是在输入上进行梯度上升(增大loss),在参数上进行梯度下降(减小loss)。 由于输入会进行embedding lookup,所以实际的做法是在embedding table进行梯度上升。(既然负梯度是Loss下降最快的方向,那么正梯度就是Loss上升最快的方向。)
3.2 CV任务中的对抗扰动
首先,CV任务的输入是连续的RGB值,因此可以直接在原始图像上添加扰动。对于CV任务来说,一般输入张量的shape是(b,h,w,c),这时候我们需要固定模型的batch size(即b),然后给原始输入加上一个shape同样为(b,h,w,c)、全零初始化的Variable,比如就叫做
Δ
x
Δx
Δx,那么我们可以直接求loss对x的梯度,然后根据梯度给
Δ
x
Δx
Δx赋值,来实现对输入的干扰,完成干扰之后再执行常规的梯度下降。
3.3 原始文本扰动和Embedding扰动带来的问题
而NLP问题中,输入是离散的单词序列,一般以one-hot vector的形式呈现,如果直接在raw text上进行扰动,那么扰动的大小和方向可能都没什么意义。
Goodfellow在17年的ICLR中提出了可以在连续的embedding上做了扰动。然而,对比图像领域中直接在原始输入加扰动的做法,在embedding上加扰动会带来一个问题:这个被构造出来的“对抗样本”并不能对应到某个单词上,即,扰动后的Embedding向量不一定能匹配上原来的Embedding向量表,这样一来对Embedding层的扰动就无法对应上真实的文本输入,这就不是真正意义上的对抗样本了,因为对抗样本应该要能对应一个合理的原始输入。因此,反过来在inference的时候,对手也没有办法通过修改原始输入得到这样的对抗样本。
3.4 Embedding扰动仍然有效—一种正则化手段
然而,实验结果显示,在很多任务中,在Embedding层进行对抗扰动能有效提高模型的性能,所以仍然是非常有意义的。在CV任务中,根据经验性的结论,对抗训练往往使得模型在非对抗样本上表现变差,然而神奇的是,在NLP任务中,模型的泛化能力反而变强了。因此,在NLP任务中,对抗训练的角色不再是为了防御基于梯度的恶意攻击,反而更多的是作为一种正则化,提高模型的泛化能力。
3.5 对Embedding参数矩阵进行扰动
对于NLP任务来说,原则上也要对Embedding层的输出进行同样的操作,Embedding层的输出shape为(b,n,d),所以也要在Embedding层的输出加上一个shape为(b,n,d)的Variable,然后进行上述步骤。但这样一来,我们需要拆解、重构模型,对使用者不够友好。
不过,我们可以退而求其次。Embedding层的输出是直接取自于Embedding参数矩阵的,因此我们可以直接对Embedding参数矩阵进行扰动,即对Embedding Table进行梯度上升。这样得到的对抗样本的多样性会少一些(因为不同样本的同一个token共用了相同的扰动),但仍然能起到正则化的作用,而且这样实现起来容易得多。
笔者个人的理解:这里有两点,
- 首先肯定不能对原始输入的文本进行扰动,所以我们对词嵌入层进行扰动,词嵌入层其实也相当于后面深层网络的初始输入,所以也算是对输入进行扰动。所以,我们直接对整体的词嵌入矩阵进行扰动,因为嵌入层的输入是lookup table的过程。
- 另外,这样不用再对每个输入都定制一个Max的过程,因为不同样本的同一个token共用了相同的扰动。
4. 主要方法介绍
4.1 FGSM(Fast Gradient Sign Method),ICLR 2015
4.1.1 原理
假设对于输入的梯度为:
g = ∇ x L ( θ , x , y ) g = \nabla_xL(θ,x,y) g=∇xL(θ,x,y)
那扰动肯定是沿着梯度的方向往损失函数的极大值走:
r a d v = ϵ ⋅ s i g n ( g ) r_{adv} = \epsilon·sign(g) radv=ϵ⋅sign(g)
sign(x)是符号函数,即x大于0的时候是1,小于0的时候是-1,等于0的时候是0。
这里和FGM的主要区别在于,FGSM每个方向都走相同的一步。
4.1.2 Pytorch实现
import torch
import torch.nn as nn
import torch.nn.functional as F
# FGSM
class FGSM:
def __init__(self, model: nn.Module, eps=0.1):
#等号右边应该是一个括号,并把括号里面的这个唯一的值赋给model
#注意:等号右边不是只包含一个元素的元组,如果是只包含一个元素的
#元组,应该这样写:(123,),这时赋值时,左边的变量也为一个只包含
#一个元素的元组
self.model = (
model.module if hasattr(model, "module") else model
)
self.eps = eps
self.backup = {}
# only attack word embedding
def attack(self, emb_name='embedding'):
for name, param in self.model.named_parameters():
if param.requires_grad and emb_name in name:
self.backup[name] = param.data.clone()
r_at = self.eps * param.grad.sign()
param.data.add_(r_at)
def restore(self, emb_name='embedding'):
for name, para in self.model.named_parameters():
if para.requires_grad and emb_name in name:
assert name in self.backup
para.data = self.backup[name]
self.backup = {}
4.2 FGM(Fast Gradient Method),ICLR 2017
4.2.1 原理
更改了计算扰动的方式:
r a d v = ϵ ⋅ ( g / ∣ ∣ g ∣ ∣ 2 ) r_{adv} = \epsilon·(g/||g||_2) radv=ϵ⋅(g/∣∣g∣∣2)
4.2.2 注意事项
-
注意在训练过程中epsilon不宜选取的过大或过小,设置过大会使得模型难以收敛,设置过小比如设置为0的话相当于单个样本训练两次。
-
FGSM和FGM的区别在于采用的归一化方法不同,FGSM是通过Sign函数对梯度采取Max归一化,FGM则采用了L2归一化,理论上L2归一化更严格地保留了梯度的方向,因为Max归一化不一定和原始梯度的方向相同。
-
两种方法都有个假设,就是损失函数是线性的或者至少是局部线性的。如果不是(局部)线性的,那梯度提升的方向就不一定是最优方向了。
4.2.3 Pytorch实现
需要注意的是:这里的norm计算的是,每个样本的输入序列中出现过的词组成的矩阵的梯度norm。为了实现插件式的调用,笔者将一个batch抽象成一个样本,一个batch统一用一个norm,由于本来norm也只是一个scale的作用,影响不大。笔者的实现如下:
import torch
class FGM():
def __init__(self, model):
self.model = model
self.backup = {}
def attack(self, epsilon=1., emb_name='emb.'):
# emb_name这个参数要换成你模型中embedding的参数名
for name, param in self.model.named_parameters():
if param.requires_grad and emb_name in name:
# tensor.clone()会创建一个与被clone的tensor完全一样的tensor,两者不共享内存但是新tensor仍保存在计算图中,即新的tensor仍会被autograd追踪
# 这里是在备份
self.backup[name] = param.data.clone()
# 归一化
norm = torch.norm(param.grad)
if norm != 0 and not torch.isnan(norm):
r_at = epsilon * param.grad / norm
param.data.add_(r_at)
def restore(self, emb_name='emb.'):
# emb_name这个参数要换成你模型中embedding的参数名
for name, param in self.model.named_parameters():
if param.requires_grad and emb_name in name:
assert name in self.backup
param.data = self.backup[name]
self.backup = {}
要使用对抗训练时,只需要添加几行代码:
# 初始化
fgm = FGM(model)
for batch_input, batch_label in data:
# 正常训练
loss = model(batch_input, batch_label)
loss.backward() # 反向传播,得到正常的grad
# 对抗训练
# 在embedding上添加对抗扰动
fgm.attack()
loss_adv = model(batch_input, batch_label)
# 反向传播,并在正常的grad基础上,累加对抗训练的梯度,如果不想累加就加个梯度清零
loss_adv.backward()
# 恢复embedding参数
fgm.restore()
# 梯度下降,更新参数
optimizer.step()
model.zero_grad()
4.3 PGD(Projected Gradient Descent),ICLR 2018
4.3.1 原理
内部max的过程,本质上是一个非凹的约束优化问题,FGM解决的思路其实就是梯度上升,那么FGM简单粗暴的“一步到位”,是不是有可能并不能走到约束内的最优点呢?当然是有可能的。
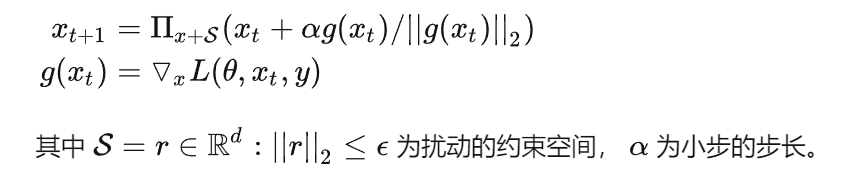
于是,一个很intuitive的改进诞生了:Madry在18年的ICLR中,提出了用Projected Gradient Descent(PGD)的方法,简单的说,就是 “小步走,多走几步”,如果走出了扰动半径为 ϵ ϵ ϵ的空间,就映射回“球面”上,以保证扰动不要过大。PGD是一种迭代攻击,相比于普通的FGSM和FGM仅做一次迭代,PGD是做多次迭代,每次走一小步,每次迭代都会将扰动投射到规定范围内。
具体公式如下,其中,t指迭代次数。t+1时刻输入根据t时刻的输入及t时刻的梯度求出。 ∏ x + S \prod _{x+S} ∏x+S的意思是,如果扰动超过一定的范围,就要映射回规定的范围S内,这里的x为原始的正常的样本输入值。
4.3.2 Pytorch实现
PGD基于FGM进行了改进,相较于FGM简单粗暴的每次都添加 ϵ \epsilon ϵ大小控制的干扰,PGD的干扰就以一种更为精细的方式生成。
具体来说,针对每个训练样本,PGD第一步的操作是备份原来的梯度信息。然后,PGD进行K次对嵌入层添加干扰操作,即attack操作,并在第一次attck时备份嵌入层的权重参数。
在进行添加干扰之后,PGD相较于FGM还有额外的梯度操作,在前K-1次需要清空梯度,在最后第K次需要恢复一开始备份的原来的梯度信息。这样操作是因为前K-1次反向传播的目的是为下一次扰动的计算提供新的梯度,最后一次反向传播的作用是在原梯度基础上累加对抗训练的梯度,模型最终的梯度就是最开始的梯度加上最后一次扰动产生的梯度。在完成了K次attack操作并将最后一次attack产生的梯度累加到原来的梯度之后,模型还需要恢复原来的嵌入层参数。
伪代码如下:
对于每个样本x:
(1).计算x的前向loss、反向传播得到梯度并备份
对于每步t:
(2).根据embedding矩阵的梯度计算出扰动r,并加到当前embedding上,相当于x+r(超出范围则投影回epsilon内)
(3).if t不是最后一步: 将梯度归0,根据(1)的x+r计算前后向并得到梯度
(4).if t是最后一步: 恢复(1)的梯度,计算最后的x+r并将梯度累加到(1)上
(5).将embedding恢复为(1)时的值
(6).根据(4)的梯度对参数进行更新
import torch
class PGD():
def __init__(self, model):
self.model = model
self.emb_backup = {}
self.grad_backup = {}
def attack(self, epsilon=1., alpha=0.3, emb_name='emb.', is_first_attack=False):
# emb_name这个参数要换成你模型中embedding的参数名
for name, param in self.model.named_parameters():
if param.requires_grad and emb_name in name:
# 备份embedding
if is_first_attack:
self.emb_backup[name] = param.data.clone()
norm = torch.norm(param.grad)
if norm != 0 and not torch.isnan(norm):
r_at = alpha * param.grad / norm
# 每次扰动都进行叠加了
param.data.add_(r_at)
param.data = self.project(name, param.data, epsilon)
def restore(self, emb_name='emb.'):
# emb_name这个参数要换成你模型中embedding的参数名
for name, param in self.model.named_parameters():
if param.requires_grad and emb_name in name:
assert name in self.emb_backup
param.data = self.emb_backup[name]
self.emb_backup = {}
def project(self, param_name, param_data, epsilon):
r = param_data - self.emb_backup[param_name]
if torch.norm(r) > epsilon:
# 映射回球面,向量单位化,然后乘半径epsilon
r = epsilon * r / torch.norm(r)
return self.emb_backup[param_name] + r
def backup_grad(self):
for name, param in self.model.named_parameters():
if param.requires_grad:
self.grad_backup[name] = param.grad.clone()
def restore_grad(self):
for name, param in self.model.named_parameters():
if param.requires_grad:
param.grad = self.grad_backup[name]
训练时,通过如下代码调用:
pgd = PGD(model)
K = 3
for batch_input, batch_label in data:
# 正常训练
loss = model(batch_input, batch_label)
# 反向传播,得到正常的grad
loss.backward()
# 备份梯度
pgd.backup_grad()
# 对抗训练
for t in range(K):
# 在embedding上添加扰动, first attack时备份param.data
# t+1时刻输入根据t时刻的输入及t时刻的梯度求出,这里多步迭代体现在这里
# t时刻的输入,即t时刻的x+r,并没有被清空(没恢复,pgd.restore()),所以扰动是不断叠加的。
pgd.attack(is_first_attack=(t==0))
if t != K-1:
model.zero_grad()
else:
pgd.restore_grad()
# 计算损失,反向传播,如果是最后一步,在正常的grad基础上,累加对抗训练的梯度
loss_adv = model(batch_input, batch_label)
# 反向传播,这里有t时刻的输入,在其清空之前,拿去求扰动
loss_adv.backward()
# 恢复embedding参数
pgd.restore()
# 更新参数
optimizer.step()
model.zero_grad()
4.3.3 分析
可以看到,在循环中扰动r是逐渐累加的,要注意的是最后更新参数只使用x+最后一个扰动r算出来的梯度。
PGD的优点:
- 由于每次只走很小的一步,所以局部线性假设基本成立的。经过多步之后就可以达到最优解了,也就是达到最强的攻击效果。
- 论文还证明用PGD算法得到的攻击样本,是一阶对抗样本中最强的了。这里所说的一阶对抗样本是指依据一阶梯度的对抗样本。
- 如果模型对PGD产生的样本鲁棒,那基本上就对所有的一阶对抗样本都鲁棒。
- 实验也证明,利用PGD算法进行对抗训练的模型确实具有很好的鲁棒性。
PGD的缺点:
-
PGD虽然简单,也很有效,但是存在一个问题是计算效率不高。不采用对抗训练的方法m次迭代只会有m次梯度的计算,但是对于PGD而言,每做一次梯度下降(获取模型参数的梯度,训练模型),都要对应有K步的梯度提升(获取输入的梯度,寻找扰动)。所以相比不采用对抗训练的方法,PGD需要做m(K+1)次梯度计算。
这里个人理解是,每更新一次模型参数,要先一次梯度下降备份参数,提供初始梯度,然后进行K次梯度提升,这K次梯度提升其实就是通过K次loss.backward()计算得到梯度然后进行扰动的计算,所以总共K+1次的梯度计算。
4.4 FreeAT(Free Adversarial Training),NIPS 2019
4.4.1 改进动机
普通的 PGD方法,在计算一个epoch的一个batch时:
- 内层循环经过K次前向后向的传播,得到K个关于输入的梯度,更新扰动;
- 外层循环经过1次前后向的传播得到关于参数的梯度更新网络。
这样的计算成本是十分高昂的,其实,我们在针对输入或参数中的一个计算梯度时,能够几乎无成本的得到另外一个的梯度。这就是 Free Adversarial Training的思想,在一次计算中利用更多的信息加速对抗性学习的训练。
在PGD的计算过程中,每次做前向后向计算时,不管是参数的梯度还是输入的梯度,都会计算出来,只不过在梯度下降的过程中只利用参数的梯度,在梯度提升的过程中只利用**输入的梯度,**这实际上有很大的浪费。 我们能不能在一次前向后向计算过程中,把计算出来的参数的梯度和输入的梯度同时利用上?这就是FreeAT的核心思想。
4.4.2 算法
如何做呢?
- FreeAT仍然采用了PGD这种训练方式,但对于每个min-batch的样本,会求m次梯度,每次求得梯度,我们既用来更新扰动,也用来更新参数。原始的PGD训练方法,每次内层计算只用梯度来更新扰动,等m步走完之后,才重新再计算一次梯度,更新参数。
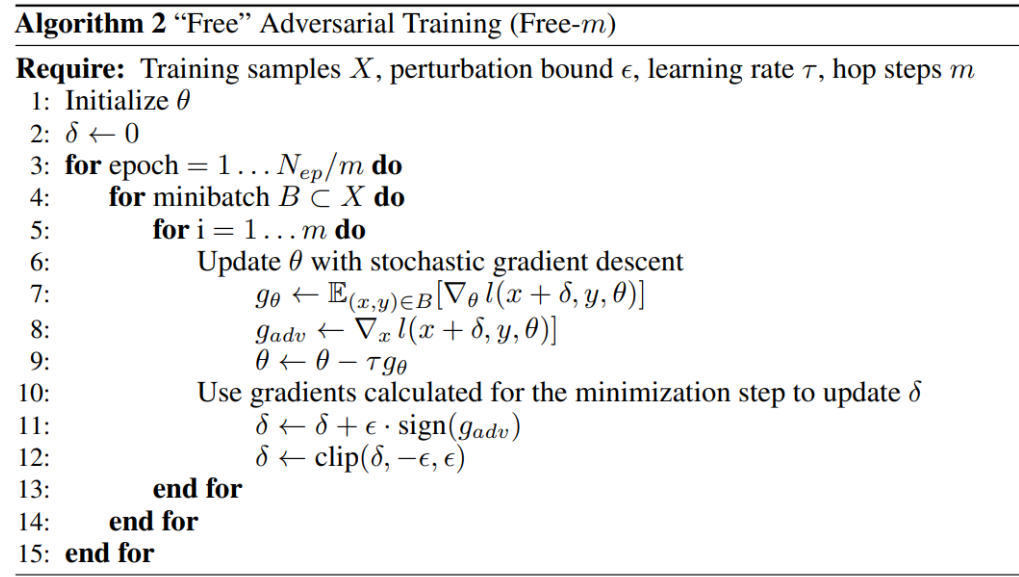
- FreeAT对每个样本进行连续重复的m次训练,为了保证总的梯度计算次数和普通训练的梯度次数一样,把原来的epoch除以m。
- 计算扰动时会复用上一步的梯度。
- 最终只需要 N e p N_{ep} Nep次梯度计算
算法流程如下图所示:
4.5 YOPO(You can Only Propagate Once),NIPS 2019
4.5.1 改进动机
YOPO5 的出发点是利用神经网络的结构来降低梯度计算的计算量。从极大值原理PMP(Pontryagin’s maximum principle)出发,对抗扰动只和网络的第 0 层有关,即只在 embedding 层上添加扰动。再加之,层之间是解耦合的,那就不需要每次都计算完整的前后向传播。
极大值原理PMP(Pontryagin’s maximum principle)是optimizer的一种,它将神经网络看作动力学系统。这个方法的优点是在优化网络参数时,层之间是解耦的。通过这个思想,我们可以想到,既然扰动是加在embedding层的,为什么每次还要计算完整的前后向传播呢?
4.5.2 算法
基于这个想法,作者就想复用后面几层的梯度,减少非必要的完整传播。可以将 PGD 的r次攻击拆成 m×n次。
首先在m轮中,每轮只进行一次前向后向传播。每轮传播中,进行完整的前向传播,在接下来的反向传播中到第1层就停止,用p记录下反向传播的结果,把p固定住,认为它不会随着扰动的改变而改变;接着在第0层上进行n次攻击,这样YOPO只完成了m次的完整正向反向传播但却实现了m×n次扰动的更新。
这样只要计算对于网络第0层 f 0 f_0 f0的梯度,减少了正反向传播的层数,从而加快速度。
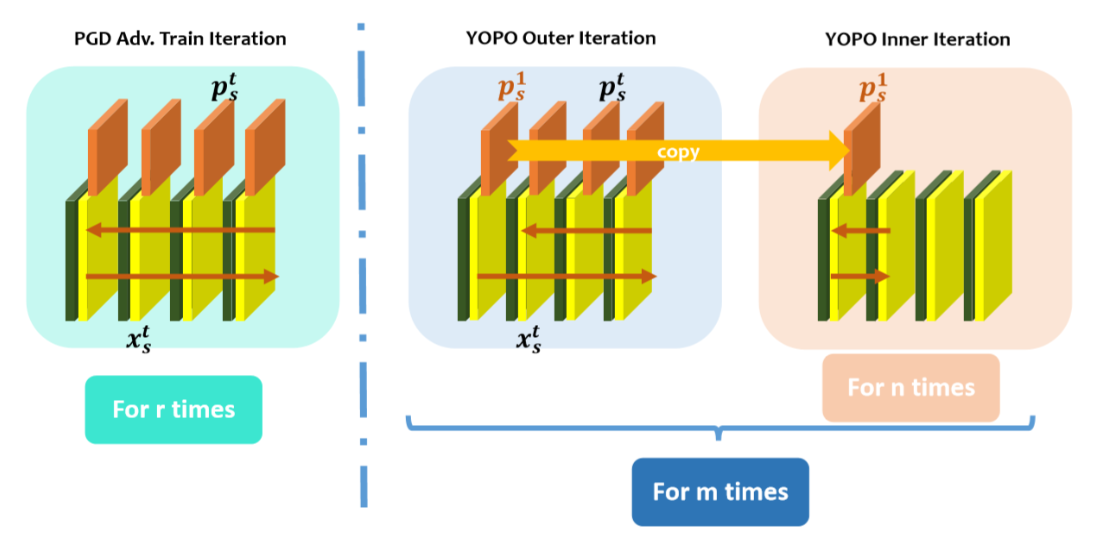
如上图所示,其中橄榄绿和黄色的块代表网络中间层的 x t x_t xt ,橘红色的块代表每一层对于loss的梯度,也就是 p t p_t pt。
左边是传统的PGD-r算法,可以看出,每要更新一次第0层的 η \eta η,就需要完成一次完整的正向传播和反向传播,而PGD-r算法每迭代一次 θ \theta θ都需要进行r次这样的更新。
右边是YOPO-m-n算法,同样是更新第0层的参数 η \eta η ,首先也同样需要进行 x t x_t xt的正向传播,然后进行 p t p_t pt的反向传播,不同的是在得到 p 1 p_1 p1之后,将它拷贝一份,利用 p 1 p_1 p1和函数 f 0 f_0 f0来计算的 η \eta η梯度,并执行n次梯度下降,然后再进行下一次的正反向传播。这样一来,YOPO-m-n每进行一次完整的正反向传播,都可以完成 η \eta η的n次更新。
4.6 FreeLB(Free Large Batch Adversarial Training),ICLR 2020
4.6.1 原理和算法
FreeLB针对PGD的多次迭代训练的问题进行了改进:
- PGD是迭代K次扰动后取最后一次扰动的梯度更新参数,FreeLB是取K次迭代中的平均梯度。具体而言,FreeLB每轮计算则不做model.zero_grad(),相当于每轮的 loss.backward()都在param.grad上做累加,最后取平均。
- PGD更精确、更谨慎、更符合梯度上升的一贯作风;FreeLB更粗放、更快。
- 这篇文章还提出了对抗训练和dropout不能同时使用。
- 最终需要进行 N e p ∗ K N_{ep}*K Nep∗K次梯度计算

4.6.2 FreeLB和FreeAT、PGD的区别
- 和FreeAT一样,FreeLB也想更高效的利用两种梯度。但是和FreeAT不一样的是,FreeLB并不是在每次梯度提升的过程中,都会对参数进行更新,而是将参数的梯度累积起来。这样走过K步之后,FreeLB利用K步之后积累的参数梯度对参数θ进行更新。
- 根据算法源代码,PGD需要进行 N e p ∗ ( K + 1 ) N_{ep}*(K+1) Nep∗(K+1)次梯度计算,FreeAT需要进行 N e p N_{ep} Nep次,FreeLB需要 N e p ∗ K N_{ep}*K Nep∗K次。虽然FreeLB在效率上并没有太大的优势,但是其效果不错。
这里PGD多的一次应该是指一开始的梯度备份求的那次梯度,Free AT则是因为N除以K了。
- 由于FreeLB利用了多步K积累的梯度再做更新,对梯度的估计更加精准,而且不存在FreeAT那样连续利用多个相同的min-batch进行梯度更新的问题。
- 相比于YOPO-m-n,FreeLB也是将K步(这里指m)中的梯度综合后再更新参数,不同的是其没有更进一步的n层,即使有,也是n个完全相同的值。
- 为什么论文成这种算法为Large Batch呢?在梯度下降时,我们使用的梯度是基于[X+r1,X+r2,…,X+rk]进行计算的,这可以理解为近似的对K个不同batch的样本进行平均,所以相当于虚拟的增大了样本的数量。
4.7 SMART(SMoothness-inducing Adversarial Regularization),ACL 2020
4.7.1 核心思想
之前我们看到的所有操作基本都是基于 Min-Max 的目标函数 ,但是在SMART却放弃了Min-Max公式,选择通过正则项Smoothness-inducing Adversarial Regularization完成对抗学习。为了解决这个新的目标函数作者又提出了优化算法Bregman Proximal Point Optimization,这就是 SMART 的两个主要内容。
SMART论文中提出了两个方法:
1.对抗正则 SMoothness-inducing Adversarial Regularization,提升模型鲁棒性。
2.优化算法 Bregman proximal point optimization,避免灾难性遗忘。
第一种参考了半监督对抗训练,对抗的目标是最大化扰动前后的输出,在分类任务时loss采用对称的KL散度,回归任务时使用平方损失。
SMART的算法和PGD相似,也是迭代K步找到最优r,然后更新梯度。
4.8 VAT虚拟对抗训练,ACL 2020
4.8.1 研究动机
为了解决当前的预训练模型(文中用BERT和ROBERTa)泛化性和鲁棒性不足的问题,并且当前对抗训练虽然可以增强鲁棒性,但会损害泛化性的问题,提出了通用的语言模型对抗式训练算法:ALUM。
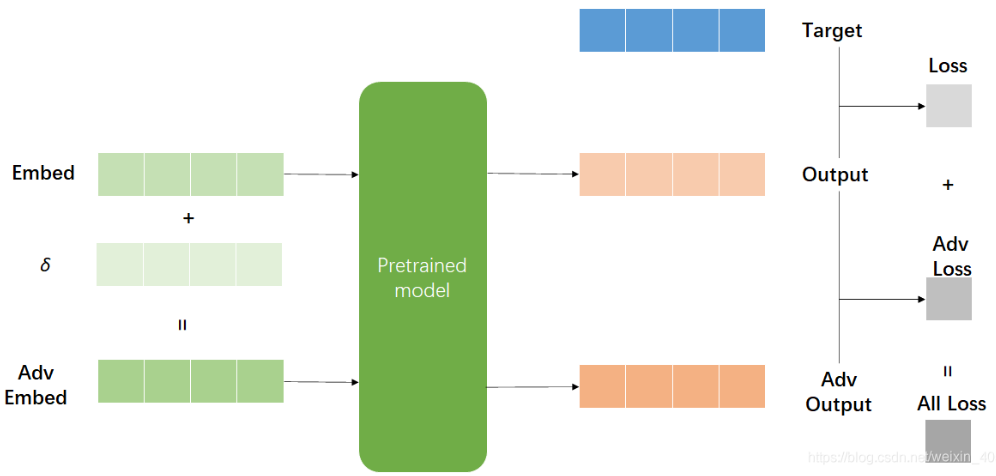
该模型是一种半监督学习的模型,相比于其他对抗式学习不同之处,例如FGSM、FGM、PGD等,ALUM是加入了无标签数据去优化模型参数。所以在训练过程中,计算样本、对抗样本的logits的DL散度得到对应的损失。
4.8.2 算法

- 循环epoch
- 循环数据集,每次产生一个batch_size大小的数据
- 生成一个扰动δ , δ 服从均作为0,方差为1高斯分布
- 循环K次,理论K越大效果越好,实际使用K=1,减少计算量
- 计算实际输入的输出和对抗样本的实际输入的DL散度Loss,并计算梯度
- 扰动正则化
- 循环K次结束
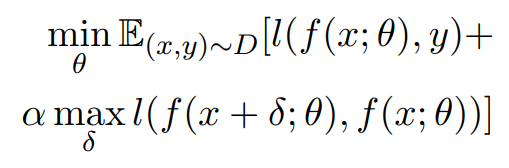
- 计算模型的Loss(带标签数据loss+虚拟对抗Loss)计算梯度更新参数,α是增强对抗学习的比例,预训练设置为10,下游任务设置为1。
最后我们需要的是最小化Loss,最大化Adv Loss,最后我们的目标是:

















 1527
1527

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









