






关于圆拟合的问题,目前网上大多数的做法都默认半径未知,将圆心坐标和半径都视为未知量,利用最小二乘法进行求解,从而得到圆拟合问题的解析解。但在半径已知的情况下,该算法不再适用。因此本文尝试对半径已知的圆拟合问题进行求解。
1 问题描述
已知拟合曲线为半径已知的圆弧,根据数据点集合计算得到圆心。
输入:平面上各点坐标
,半径
。
输出:圆心坐标。
2 理论分析
已知圆的方程为:
对于各数据点,令:
令:
则原问题转为问题转化为下述优化问题:
取得最小值的必要条件如下:
(但不为充分条件,因为圆心相对于圆弧的对侧一定存在至少一个极值点)
即满足下列方程组的解:
即为圆心坐标的值。这个方程组可能没有解析解,可用牛顿迭代法求解上述问题。(牛顿迭代法的初值应该位于圆心这一侧,否则可能会收敛至错误的值)
牛顿迭代法参考:Matlab--用最小二乘法确定指数函数的系数(牛顿法解二元非线性方程组)
对于该问题,有:
得到:
即:
其中:
解得:
按照牛顿迭代法步骤迭代即可得到估计解。
3 偏导数计算
对于该问题,函数及其偏导数计算如下:
记:
有:
4 仿真
采用MATLAB仿真,设真实圆心坐标为,半径为
,输入坐标点坐标存在随机噪声,大小为
。牛顿迭代初值为
,容许误差为
,最大迭代次数为
。
输出结果如下:
迭代次数:1
当前圆心估计坐标为:[0,0]
迭代次数:2
当前圆心估计坐标为:[17.1563,10.7807]
迭代次数:3
当前圆心估计坐标为:[28.5949,17.9486]
迭代次数:4
当前圆心估计坐标为:[36.2223,22.6982]
迭代次数:5
当前圆心估计坐标为:[41.31,25.8203]
迭代次数:6
当前圆心估计坐标为:[44.7063,27.8337]
迭代次数:7
当前圆心估计坐标为:[46.9776,29.0716]
迭代次数:8
当前圆心估计坐标为:[48.4997,29.7422]
迭代次数:9
当前圆心估计坐标为:[49.5029,29.9978]
迭代次数:10
当前圆心估计坐标为:[50.0634,30.0456]
迭代次数:11
当前圆心估计坐标为:[50.2302,30.0637]
迭代次数:12
当前圆心估计坐标为:[50.2434,30.0666]
迭代次数:13
当前圆心估计坐标为:[50.2435,30.0667]
迭代次数:14
拟合结果图如下。其中,蓝色点为随机干扰下的位于圆弧上的点云,蓝色X所在位置为真实圆心坐标。红线为已知半径的圆拟合结果,红色X所在位置为已知半径的圆心估计坐标;粉线为半径未知的最小二乘法拟合结果,粉色X所在位置为半径未知的最小二乘法圆心估计坐标。
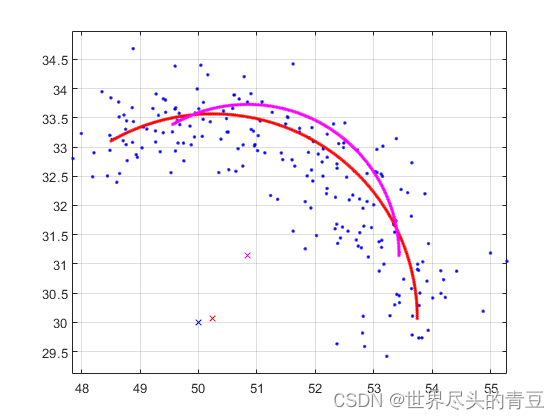
圆心估计结果如下:
圆心实际坐标为:[50,30]
实际半径为:3.5
牛顿迭代法圆心估计坐标为:[50.2435,30.0667]
牛顿迭代法圆心估计误差为:0.25242
最小二乘法圆心估计坐标为:[50.845,31.1428]
最小二乘法估计半径为:2.5861
最小迭代法圆心估计误差为:1.4213
可以看出该算法较好地利用了半径信息进行拟合。
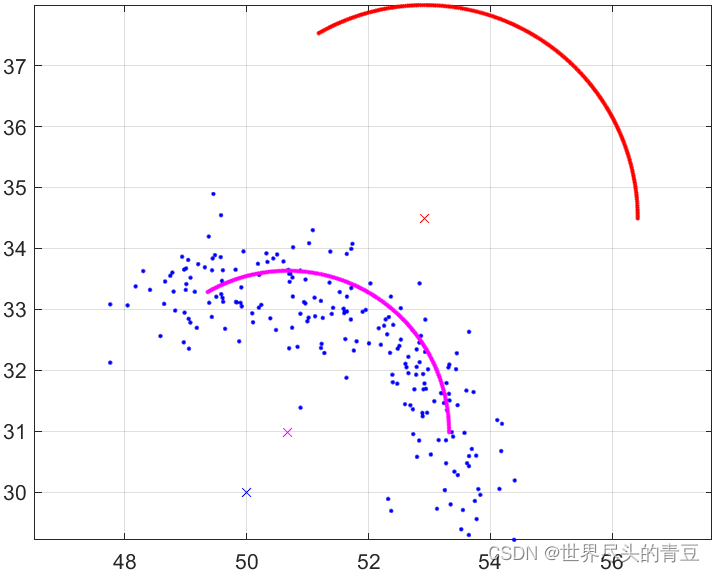
更改牛顿迭代法初值为,得到拟合结果如下图,可以看到,圆心收敛到圆外的错误位置,这是因为建立的优化问题存在多个极值点的缘故。因此实际使用时,需要通过一些信息得到圆心初始位置,或者根据圆弧上点的坐标,往多个方向设定初始值,分别迭代计算,取最终的最小值。
5 代码
算法主要代码如下:
%% 牛顿迭代法求解固定半径圆心坐标
Ux = sum(x);
Uy = sum(y);
Uxx = sum(x.^2);
Uyy = sum(y.^2);
Uxy = sum(x.*y);
Uxxx = sum(x.^3);
Uyyy = sum(y.^3);
Uxxy = sum(x.^2.*y);
Uxyy = sum(x.*y.^2);
N = length(x);
U = [Ux,Uy,...
Uxx,Uyy,Uxy,...
Uxxx,Uyyy,Uxxy,Uxyy];
iterNum = 100;
ruslutErrorMax = 1e-10;
% 圆心初值需在圆弧的内侧,否则可能会收敛到错误的位置
% 实际使用时,需要通过一些信息得到圆心初始位置
% 或者根据圆弧上点的坐标,往多个方向设定初始值,分别迭代计算,取最终的最小值
a0 = 0;
b0 = 0;
for i = 1:iterNum
disp(strcat(['迭代次数:',num2str(i)]));
disp(strcat(['当前圆心估计坐标为:[',num2str(a0),',',num2str(b0),']']));
[h1,dh1_da,dh1_db] = fun_h1(a0,b0,R_real,U,N);
[h2,dh2_da,dh2_db] = fun_h2(a0,b0,R_real,U,N);
C = [dh1_da,dh1_db;
dh2_da,dh2_db];
D = [h1-dh1_da*a0-dh1_db*b0;
h2-dh2_da*a0-dh2_db*b0];
result = -C\D;
a_newton = result(1);
b_newton = result(2);
if abs(a_newton-a0) + abs(b_newton-b0) < ruslutErrorMax
break;
end
a0 = a_newton;
b0 = b_newton;
end全部代码如下:
clear;close all;clc;
t=0:0.01:pi*2/3;
a_real=50;
b_real=30;
R_real=3.5;
R_uncertainty = 0.5;
x=a_real+R_real*cos(t)+R_uncertainty*randn(1,length(t));
y=b_real+R_real*sin(t)+R_uncertainty*randn(1,length(t));
%% 牛顿迭代法求解固定半径圆心坐标
Ux = sum(x);
Uy = sum(y);
Uxx = sum(x.^2);
Uyy = sum(y.^2);
Uxy = sum(x.*y);
Uxxx = sum(x.^3);
Uyyy = sum(y.^3);
Uxxy = sum(x.^2.*y);
Uxyy = sum(x.*y.^2);
N = length(x);
U = [Ux,Uy,...
Uxx,Uyy,Uxy,...
Uxxx,Uyyy,Uxxy,Uxyy];
iterNum = 100;
ruslutErrorMax = 1e-10;
% 圆心初值需在圆弧的内侧,否则可能会收敛到错误的位置
% 实际使用时,需要通过一些信息得到圆心初始位置
% 或者根据圆弧上点的坐标,往多个方向设定初始值,分别迭代计算,取最终的最小值
a0 = 0;
b0 = 0;
for i = 1:iterNum
disp(strcat(['迭代次数:',num2str(i)]));
disp(strcat(['当前圆心估计坐标为:[',num2str(a0),',',num2str(b0),']']));
[h1,dh1_da,dh1_db] = fun_h1(a0,b0,R_real,U,N);
[h2,dh2_da,dh2_db] = fun_h2(a0,b0,R_real,U,N);
C = [dh1_da,dh1_db;
dh2_da,dh2_db];
D = [h1-dh1_da*a0-dh1_db*b0;
h2-dh2_da*a0-dh2_db*b0];
result = -C\D;
a_newton = result(1);
b_newton = result(2);
if abs(a_newton-a0) + abs(b_newton-b0) < ruslutErrorMax
break;
end
a0 = a_newton;
b0 = b_newton;
end
%% 最小二乘法求解未知半径圆心坐标
x=x(:); % Transpose
y=y(:);
Mole=[x y ones(size(x))];
Deno=-(x.^2+y.^2);
Result1=Mole\Deno;
% x^2+y^2+ax+by+c=0 ---> ax+by+c=-(x^2+y^2)
% [x y 1]*[a;b;c]=-(x^2+y^2)
% [a;b;c]=[x y 1]\[-(x^2+y^2)]
% Column principal elimination method
% Least square fitting can also be used
m=[x y ones(size(x))]\Deno;
a_ls=-0.5*m(1);
b_ls=-0.5*m(2);
R_ls=sqrt((m(1)^2+m(2)^2)/4-m(3));
%% 结果显示
figure
plot(a_real,b_real,'xb',x,y,'b.');
hold on;
plot(a_newton,b_newton,'xr',(a_newton+R_real*cos(t)),(b_newton+R_real*sin(t)),'r.');
hold on;
plot(a_ls,b_ls,'xm',(a_ls+R_ls*cos(t)),(b_ls+R_ls*sin(t)),'m.');
grid on;
axis equal;
disp(strcat(['圆心实际坐标为:[',num2str(a_real),',',num2str(b_real),']']));
disp(strcat(['实际半径为:',num2str(R_real)]));
disp(strcat(['牛顿迭代法圆心估计坐标为:[',num2str(a_newton),',',num2str(b_newton),']']));
disp(strcat(['牛顿迭代法圆心估计误差为:',num2str(sqrt((a_newton-a_real)^2+(b_newton-b_real)^2))]));
disp(strcat(['最小二乘法圆心估计坐标为:[',num2str(a_ls),',',num2str(b_ls),']']));
disp(strcat(['最小二乘法估计半径为:',num2str(R_ls)]));
disp(strcat(['最小迭代法圆心估计误差为:',num2str(sqrt((a_ls-a_real)^2+(b_ls-b_real)^2))]));
其中fun_f1和fun_f2定义为:
function [y,dy_da,dy_db] = fun_h1(a,b,R,U,N)
U_cell = num2cell(U);
[Ux,Uy,...
Uxx,Uyy,Uxy,...
Uxxx,Uyyy,Uxxy,Uxyy] = deal(U_cell{:});
y = -Uxxx-Uxyy...
+3*a*Uxx+a*Uyy+2*b*Uxy...
+(R^2-3*a^2-b^2)*Ux-2*a*b*Uy...
+N*a^3+N*a*b^2-N*a*R^2;
dy_da = 3*Uxx+Uyy...
-6*a*Ux-2*b*Uy...
+3*N*a^2+N*b^2-N*R^2;
dy_db = 2*Uxy...
-2*b*Ux-2*a*Uy...
+2*N*a*b;
end
function [y,dy_da,dy_db] = fun_h2(a,b,R,U,N)
U_cell = num2cell(U);
[Ux,Uy,...
Uxx,Uyy,Uxy,...
Uxxx,Uyyy,Uxxy,Uxyy] = deal(U_cell{:});
y = -Uyyy-Uxxy...
+b*Uxx+3*b*Uyy+2*a*Uxy...
-2*a*b*Ux+(R^2-3*b^2-a^2)*Uy...
+N*a^2*b+N*b^3-N*b*R^2;
dy_da = 2*Uxy...
-2*b*Ux-2*a*Uy...
+2*N*a*b;
dy_db = Uxx+3*Uyy...
-2*a*Ux-6*b*Uy...
+N*a^2+3*N*b^2-N*R^2;
end














 3万+
3万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









