







简介:STM32F103C8T6驱动SR04超声波模块源码介绍。
开发平台:KEIL ARM
MCU型号:STM32F103C8T6
传感器型号:SR04
特别提示:驱动内可能使用了某些其他组件,比如delay等,在文末外设模板下载地址内有。
1积分源码下载地址在文末!!!
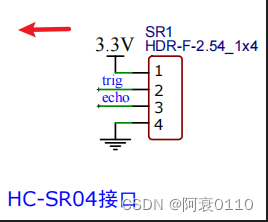
接口图:
使用举例:
#include <stdio.h>
#include "SR04.h"
int main()
{
uint16_t distance = 0;
SR04.Init(); // 初始化
while(1) {
distance = SR04.Read(); // 读取距离cm
printf("sr04 distance:%d\n", distance);
delayMs(100);
}
}驱动源码:
SR04.c
/* include ---------------------------------------------------------*/
#include "main.h"
/* private define -------------------------------------------------*/
// ECHO
#define ECHO_GPIO_PORT GPIOA /* GPIO端口 */
#define ECHO_GPIO_CLK RCC_APB2Periph_GPIOA /* GPIO端口时钟 */
#define ECHO_GPIO_PIN GPIO_Pin_8 /* 连接到SCL时钟线的GPIO */
#define ECHO_GPIO_TOGGLE ECHO_GPIO_PORT->BSRR = ((ECHO_GPIO_PORT->ODR & ECHO_GPIO_PIN) << 16) | (~ECHO_GPIO_PORT->ODR & ECHO_GPIO_PIN)
#define ECHO_GPIO_SET ECHO_GPIO_PORT->BSRR = (uint32_t)ECHO_GPIO_PIN // 置1
#define ECHO_GPIO_RESET ECHO_GPIO_PORT->BSRR = (uint32_t)ECHO_GPIO_PIN<<16 // 置0
#define ECHO_GPIO_READ ((ECHO_GPIO_PORT->IDR & ECHO_GPIO_PIN) != 0)
// TRIG
#define TRIG_GPIO_PORT GPIOB /* GPIO端口 */
#define TRIG_GPIO_CLK RCC_APB2Periph_GPIOB /* GPIO端口时钟 */
#define TRIG_GPIO_PIN GPIO_Pin_15 /* 连接到SCL时钟线的GPIO */
#define TRIG_GPIO_TOGGLE TRIG_GPIO_PORT->BSRR = ((TRIG_GPIO_PORT->ODR & TRIG_GPIO_PIN) << 16) | (~TRIG_GPIO_PORT->ODR & TRIG_GPIO_PIN)
#define TRIG_GPIO_SET TRIG_GPIO_PORT->BSRR = (uint32_t)TRIG_GPIO_PIN // 置1
#define TRIG_GPIO_RESET TRIG_GPIO_PORT->BSRR = (uint32_t)TRIG_GPIO_PIN<<16 // 置0
#define TRIG_GPIO_READ ((TRIG_GPIO_PORT->IDR & TRIG_GPIO_PIN) != 0)
/* private variables ----------------------------------------------*/
/* private function prototypes ------------------------------------*/
static void Init(void);
static uint16_t Read(void);
/* public variables -----------------------------------------------*/
SR04_t SR04 =
{
Init,
Read
};
/**
* @brief SR04 Init
* @param None
* @retval None
* @note None
*/
static void Init(void)
{
GPIO_InitTypeDef GPIO_InitStructer;
RCC_APB2PeriphClockCmd(TRIG_GPIO_CLK, ENABLE);
/*TRIG触发信号*/
GPIO_InitStructer.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_InitStructer.GPIO_Mode=GPIO_Mode_Out_PP;
GPIO_InitStructer.GPIO_Pin=TRIG_GPIO_PIN;
GPIO_Init(TRIG_GPIO_PORT, &GPIO_InitStructer);
GPIO_ResetBits(TRIG_GPIO_PORT,TRIG_GPIO_PIN);
RCC_APB2PeriphClockCmd(ECHO_GPIO_CLK, ENABLE);
/*ECOH回响信号*/
GPIO_InitStructer.GPIO_Mode=GPIO_Mode_IN_FLOATING;
GPIO_InitStructer.GPIO_Pin=ECHO_GPIO_PIN;
GPIO_Init(ECHO_GPIO_PORT, &GPIO_InitStructer);
}
/**
* @brief Read IO口控制
* @param None
* @retval cm
* @note None
*/
static uint16_t Read(void)
{
uint32_t tim_time = 0;
uint16_t length = 0;
TRIG_GPIO_SET;
DELAYClass.DelayUs(20);
TRIG_GPIO_RESET;
//等待返回信号
while(ECHO_GPIO_READ == RESET)
{
tim_time++;
DELAYClass.DelayUs(1);
if(tim_time >= 10000)
{
return 10000;
}
}
tim_time = 0;
//等待返回信号
while(ECHO_GPIO_READ)
{
tim_time++;
DELAYClass.DelayUs(1);
if(tim_time >= 10000)
{
return 10000;
}
}
//关闭定时器
length = (tim_time * 0.12)/2;
return length;
}
SR04.h
#ifndef __SR04_H_
#define __SR04_H_
#include <main.h>
typedef struct
{
void (*Init)(void);
uint16_t (*Read)(void);
}SR04_t;
extern SR04_t SR04;
#endif
驱动下载地址:
https://download.csdn.net/download/m0_50669075/87673012
STM32工程模板、外设模板、模块模板下载地址:

















 1114
1114











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











