







3 模型构建
3.1 模型创建步骤与 nn.Module
本章代码:https://github.com/zhangxiann/PyTorch_Practice/blob/master/lesson3/module_containers.py
这篇文章来看下 PyTorch 中网络模型的创建步骤。网络模型的内容如下,包括模型创建和权值初始化,这些内容都在nn.Module中有实现。
网络模型的创建步骤
创建模型有 2 个要素:构建子模块和拼接子模块。如 LeNet 里包含很多卷积层、池化层、全连接层,当我们构建好所有的子模块之后,按照一定的顺序拼接起来。
这里以上一篇文章中 lenet.py的 LeNet 为例,继承nn.Module,必须实现__init__() 方法和forward()方法。其中__init__() 方法里创建子模块,在forward()方法里拼接子模块。
class LeNet(nn.Module):
# 子模块创建
def init(self, classes):
super(LeNet, self).init()
self.conv1 = nn.Conv2d(3, 6, 5)
self.conv2 = nn.Conv2d(6, 16, 5)
self.fc1 = nn.Linear(1655, 120)
self.fc2 = nn.Linear(120, 84)
self.fc3 = nn.Linear(84, classes)
# 子模块拼接
def forward(self, x):
out = F.relu(self.conv1(x))
out = F.max_pool2d(out, 2)
out = F.relu(self.conv2(out))
out = F.max_pool2d(out, 2)
out = out.view(out.size(0), -1)
out = F.relu(self.fc1(out))
out = F.relu(self.fc2(out))
out = self.fc3(out)
return out
当我们调用net = LeNet(classes=2)创建模型时,会调用__init__()方法创建模型的子模块。
当我们在训练时调用outputs = net(inputs)时,会进入module.py的call()函数中:
def call(self, *input, **kwargs):
for hook in self._forward_pre_hooks.values():
result = hook(self, input)
if result is not None:
if not isinstance(result, tuple):
result = (result,)
input = result
if torch._C._get_tracing_state():
result = self._slow_forward(*input, **kwargs)
else:
result = self.forward(*input, **kwargs)
…
…
…
最终会调用result = self.forward(*input, **kwargs)函数,该函数会进入模型的forward()函数中,进行前向传播。
在 torch.nn中包含 4 个模块,如下图所示。
其中所有网络模型都是继承于nn.Module的,下面重点分析nn.Module模块。
nn.Module
nn.Module 有 8 个属性,都是OrderDict(有序字典)。在 LeNet 的__init__()方法中会调用父类nn.Module的__init__()方法,创建这 8 个属性。
def init(self):
“”"
Initializes internal Module state, shared by both nn.Module and ScriptModule.
“”"
torch._C._log_api_usage_once(“python.nn_module”)
self.training = True
self._parameters = OrderedDict()
self._buffers = OrderedDict()
self._backward_hooks = OrderedDict()
self._forward_hooks = OrderedDict()
self._forward_pre_hooks = OrderedDict()
self._state_dict_hooks = OrderedDict()
self._load_state_dict_pre_hooks = OrderedDict()
self._modules = OrderedDict()
_parameters 属性:存储管理 nn.Parameter 类型的参数
_modules 属性:存储管理 nn.Module 类型的参数
_buffers 属性:存储管理缓冲属性,如 BN 层中的 running_mean
5 个 ***_hooks 属性:存储管理钩子函数
其中比较重要的是parameters和modules属性。
在 LeNet 的__init__()中创建了 5 个子模块,nn.Conv2d()和nn.Linear()都是 继承于nn.module,也就是说一个 module 都是包含多个子 module 的。
class LeNet(nn.Module):
# 子模块创建
def init(self, classes):
super(LeNet, self).init()
self.conv1 = nn.Conv2d(3, 6, 5)
self.conv2 = nn.Conv2d(6, 16, 5)
self.fc1 = nn.Linear(1655, 120)
self.fc2 = nn.Linear(120, 84)
self.fc3 = nn.Linear(84, classes)
…
…
…
当调用net = LeNet(classes=2)创建模型后,net对象的 modules 属性就包含了这 5 个子网络模块。
下面看下每个子模块是如何添加到 LeNet 的_modules 属性中的。以self.conv1 = nn.Conv2d(3, 6, 5)为例,当我们运行到这一行时,首先 Step Into 进入 Conv2d的构造,然后 Step Out。右键Evaluate Expression查看nn.Conv2d(3, 6, 5)的属性。
上面说了Conv2d也是一个 module,里面的_modules属性为空,_parameters属性里包含了该卷积层的可学习参数,这些参数的类型是 Parameter,继承自 Tensor。
此时只是完成了nn.Conv2d(3, 6, 5) module 的创建。还没有赋值给self.conv1。在nn.Module里有一个机制,会拦截所有的类属性赋值操作(self.conv1是类属性),进入到__setattr__()函数中。我们再次 Step Into 就可以进入__setattr__()。
def setattr(self, name, value):
def remove_from(*dicts):
for d in dicts:
if name in d:
del d[name]
params = self.dict.get(‘_parameters’)
if isinstance(value, Parameter):
if params is None:
raise AttributeError(
“cannot assign parameters before Module.init() call”)
remove_from(self.dict, self._buffers, self._modules)
self.register_parameter(name, value)
elif params is not None and name in params:
if value is not None:
raise TypeError("cannot assign ‘{}’ as parameter ‘{}’ "
“(torch.nn.Parameter or None expected)”
.format(torch.typename(value), name))
self.register_parameter(name, value)
else:
modules = self.dict.get(‘_modules’)
if isinstance(value, Module):
if modules is None:
raise AttributeError(
“cannot assign module before Module.init() call”)
remove_from(self.dict, self._parameters, self._buffers)
modules[name] = value
elif modules is not None and name in modules:
if value is not None:
raise TypeError("cannot assign ‘{}’ as child module ‘{}’ "
“(torch.nn.Module or None expected)”
.format(torch.typename(value), name))
modules[name] = value
…
…
…
在这里判断 value 的类型是Parameter还是Module,存储到对应的有序字典中。
这里nn.Conv2d(3, 6, 5)的类型是Module,因此会执行modules[name] = value,key 是类属性的名字conv1,value 就是nn.Conv2d(3, 6, 5)。
总结
一个 module 里可包含多个子 module。比如 LeNet 是一个 Module,里面包括多个卷积层、池化层、全连接层等子 module
一个 module 相当于一个运算,必须实现 forward() 函数
每个 module 都有 8 个字典管理自己的属性
模型容器
除了上述的模块之外,还有一个重要的概念是模型容器 (Containers),常用的容器有 3 个,这些容器都是继承自nn.Module。
nn.Sequetial:按照顺序包装多个网络层
nn.ModuleList:像 python 的 list 一样包装多个网络层,可以迭代
nn.ModuleDict:像 python 的 dict一样包装多个网络层,通过 (key, value) 的方式为每个网络层指定名称。
nn.Sequetial
在传统的机器学习中,有一个步骤是特征工程,我们需要从数据中认为地提取特征,然后把特征输入到分类器中预测。在深度学习的时代,特征工程的概念被弱化了,特征提取和分类器这两步被融合到了一个神经网络中。在卷积神经网络中,前面的卷积层以及池化层可以认为是特征提取部分,而后面的全连接层可以认为是分类器部分。比如 LeNet 就可以分为特征提取和分类器两部分,这 2 部分都可以分别使用 nn.Seuqtial 来包装。
代码如下:
class LeNetSequetial(nn.Module):
def init(self, classes):
super(LeNet2, self).init()
self.features = nn.Sequential(
nn.Conv2d(3, 6, 5),
nn.ReLU(),
nn.AvgPool2d(2, 2),
nn.Conv2d(6, 16, 5),
nn.ReLU(),
nn.AvgPool2d(2, 2)
)
self.classifier = nn.Sequential(
nn.Linear(1655, 120),
nn.ReLU(),
nn.Linear(120, 84),
nn.ReLU(),
nn.Linear(84, classes)
)
def forward(self, x):
x = self.features(x)
x = x.view(x.size()[0], -1)
x = self.classifier(x)
return x
在初始化时,nn.Sequetial会调用__init__()方法,将每一个子 module 添加到 自身的_modules属性中。这里可以看到,我们传入的参数可以是一个 list,或者一个 OrderDict。如果是一个 OrderDict,那么则使用 OrderDict 里的 key,否则使用数字作为 key (OrderDict 的情况会在下面提及)。
def init(self, *args):
super(Sequential, self).init()
if len(args) == 1 and isinstance(args[0], OrderedDict):
for key, module in args[0].items():
self.add_module(key, module)
else:
for idx, module in enumerate(args):
self.add_module(str(idx), module)
网络初始化完成后有两个子 module:features和classifier。
而features中的子 module 如下,每个网络层以序号作为 key:
在进行前向传播时,会进入 LeNet 的forward()函数,首先调用第一个Sequetial容器:self.features,由于self.features也是一个 module,因此会调用__call__()函数,里面调用
result = self.forward(*input, **kwargs),进入nn.Seuqetial的forward()函数,在这里依次调用所有的 module。
def forward(self, input):
for module in self:
input = module(input)
return input
在上面可以看到在nn.Sequetial中,里面的每个子网络层 module 是使用序号来索引的,即使用数字来作为 key。一旦网络层增多,难以查找特定的网络层,这种情况可以使用 OrderDict (有序字典)。代码中使用
class LeNetSequentialOrderDict(nn.Module):
def init(self, classes):
super(LeNetSequentialOrderDict, self).init()
self.features = nn.Sequential(OrderedDict({
‘conv1’: nn.Conv2d(3, 6, 5),
‘relu1’: nn.ReLU(inplace=True),
‘pool1’: nn.MaxPool2d(kernel_size=2, stride=2),
‘conv2’: nn.Conv2d(6, 16, 5),
‘relu2’: nn.ReLU(inplace=True),
‘pool2’: nn.MaxPool2d(kernel_size=2, stride=2),
}))
self.classifier = nn.Sequential(OrderedDict({
‘fc1’: nn.Linear(1655, 120),
‘relu3’: nn.ReLU(),
‘fc2’: nn.Linear(120, 84),
‘relu4’: nn.ReLU(inplace=True),
‘fc3’: nn.Linear(84, classes),
}))
…
…
…
总结
nn.Sequetial是nn.Module的容器,用于按顺序包装一组网络层,有以下两个特性。
顺序性:各网络层之间严格按照顺序构建,我们在构建网络时,一定要注意前后网络层之间输入和输出数据之间的形状是否匹配
自带forward()函数:在nn.Sequetial的forward()函数里通过 for 循环依次读取每个网络层,执行前向传播运算。这使得我们我们构建的模型更加简洁
nn.ModuleList
nn.ModuleList是nn.Module的容器,用于包装一组网络层,以迭代的方式调用网络层,主要有以下 3 个方法:
append():在 ModuleList 后面添加网络层
extend():拼接两个 ModuleList
insert():在 ModuleList 的指定位置中插入网络层
下面的代码通过列表生成式来循环迭代创建 20 个全连接层,非常方便,只是在 forward()函数中需要手动调用每个网络层。
class ModuleList(nn.Module):
def init(self):
super(ModuleList, self).init()
self.linears = nn.ModuleList([nn.Linear(10, 10) for i in range(20)])
def forward(self, x):
for i, linear in enumerate(self.linears):
x = linear(x)
return x
net = ModuleList()
print(net)
fake_data = torch.ones((10, 10))
output = net(fake_data)
print(output)
nn.ModuleDict
nn.ModuleDict是nn.Module的容器,用于包装一组网络层,以索引的方式调用网络层,主要有以下 5 个方法:
clear():清空 ModuleDict
items():返回可迭代的键值对 (key, value)
keys():返回字典的所有 key
values():返回字典的所有 value
pop():返回一对键值,并从字典中删除
下面的模型创建了两个ModuleDict:self.choices和self.activations,在前向传播时通过传入对应的 key 来执行对应的网络层。
class ModuleDict(nn.Module):
def init(self):
super(ModuleDict, self).init()
self.choices = nn.ModuleDict({
‘conv’: nn.Conv2d(10, 10, 3),
‘pool’: nn.MaxPool2d(3)
})
self.activations = nn.ModuleDict({
‘relu’: nn.ReLU(),
‘prelu’: nn.PReLU()
})
def forward(self, x, choice, act):
x = self.choiceschoice
x = self.activationsact
return x
net = ModuleDict()
fake_img = torch.randn((4, 10, 32, 32))
output = net(fake_img, ‘conv’, ‘relu’)
# output = net(fake_img, ‘conv’, ‘prelu’)
print(output)
容器总结
nn.Sequetial:顺序性,各网络层之间严格按照顺序执行,常用于 block 构建,在前向传播时的代码调用变得简洁
nn.ModuleList:迭代行,常用于大量重复网络构建,通过 for 循环实现重复构建
nn.ModuleDict:索引性,常用于可选择的网络层
PyTorch 中的 AlexNet
AlexNet 是 Hinton 和他的学生等人在 2012 年提出的卷积神经网络,以高出第二名 10 多个百分点的准确率获得 ImageNet 分类任务冠军,从此卷积神经网络开始在世界上流行,是划时代的贡献。
AlexNet 特点如下:
采用 ReLU 替换饱和激活 函数,减轻梯度消失
采用 LRN (Local Response Normalization) 对数据进行局部归一化,减轻梯度消失
采用 Dropout 提高网络的鲁棒性,增加泛化能力
使用 Data Augmentation,包括 TenCrop 和一些色彩修改
AlexNet 的网络结构可以分为两部分:features 和 classifier。
在PyTorch的计算机视觉库torchvision.models中的 AlexNet 的代码中,使用了nn.Sequential来封装网络层。
class AlexNet(nn.Module):
def init(self, num_classes=1000):
super(AlexNet, self).init()
self.features = nn.Sequential(
nn.Conv2d(3, 64, kernel_size=11, stride=4, padding=2),
nn.ReLU(inplace=True),
nn.MaxPool2d(kernel_size=3, stride=2),
nn.Conv2d(64, 192, kernel_size=5, padding=2),
nn.ReLU(inplace=True),
nn.MaxPool2d(kernel_size=3, stride=2),
nn.Conv2d(192, 384, kernel_size=3, padding=1),
nn.ReLU(inplace=True),
nn.Conv2d(384, 256, kernel_size=3, padding=1),
nn.ReLU(inplace=True),
nn.Conv2d(256, 256, kernel_size=3, padding=1),
nn.ReLU(inplace=True),
nn.MaxPool2d(kernel_size=3, stride=2),
)
self.avgpool = nn.AdaptiveAvgPool2d((6, 6))
self.classifier = nn.Sequential(
nn.Dropout(),
nn.Linear(256 * 6 * 6, 4096),
nn.ReLU(inplace=True),
nn.Dropout(),
nn.Linear(4096, 4096),
nn.ReLU(inplace=True),
nn.Linear(4096, num_classes),
)
def forward(self, x):
x = self.features(x)
x = self.avgpool(x)
x = torch.flatten(x, 1)
x = self.classifier(x)
return x
3.2 卷积层
本章代码:https://github.com/zhangxiann/PyTorch_Practice/blob/master/lesson3/nn_layers_convolution.py
这篇文章主要介绍了 PyTorch 中常用的卷积层,包括 3 个部分。
1D/2D/3D 卷积
卷积有一维卷积、二维卷积、三维卷积。一般情况下,卷积核在几个维度上滑动,就是几维卷积。比如在图片上的卷积就是二维卷积。
一维卷积
二维卷积
三维卷积
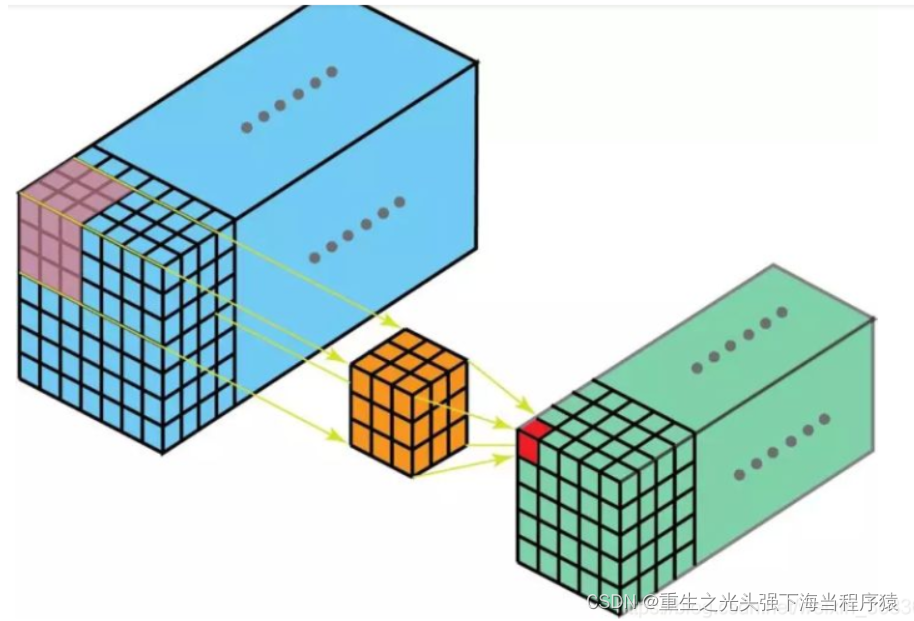
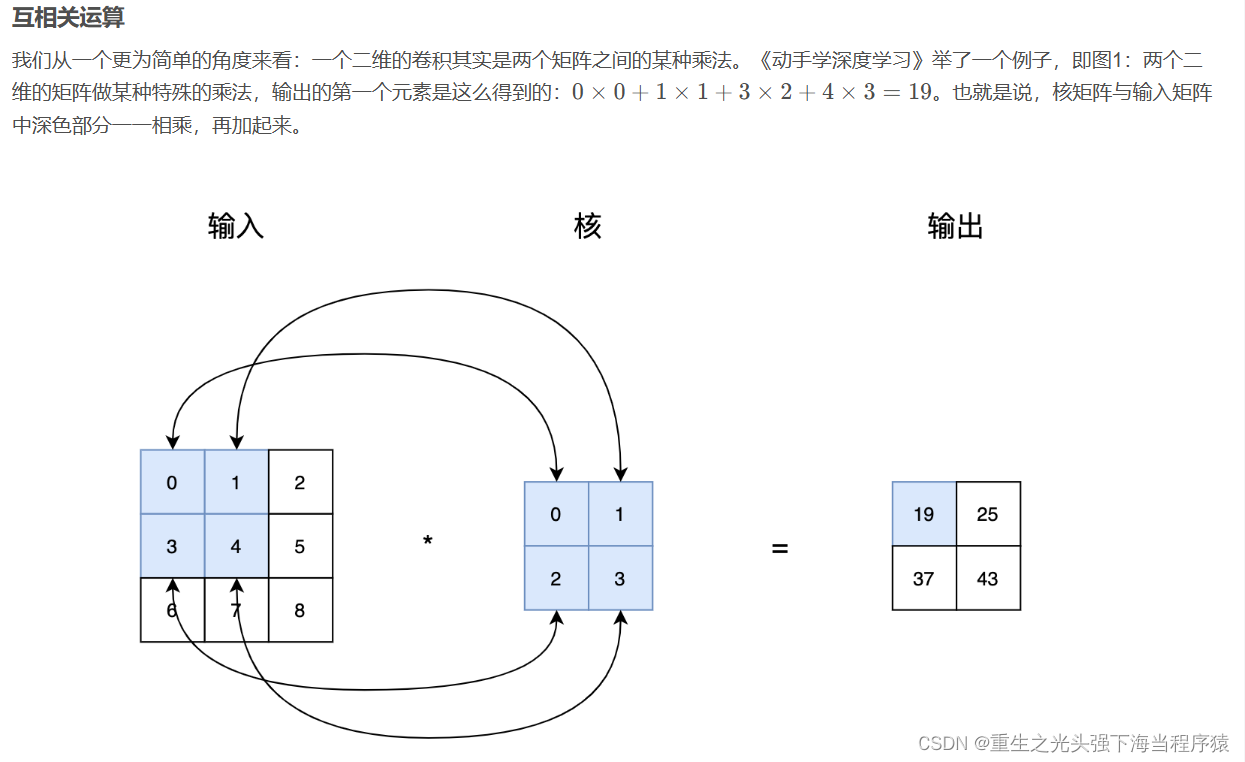
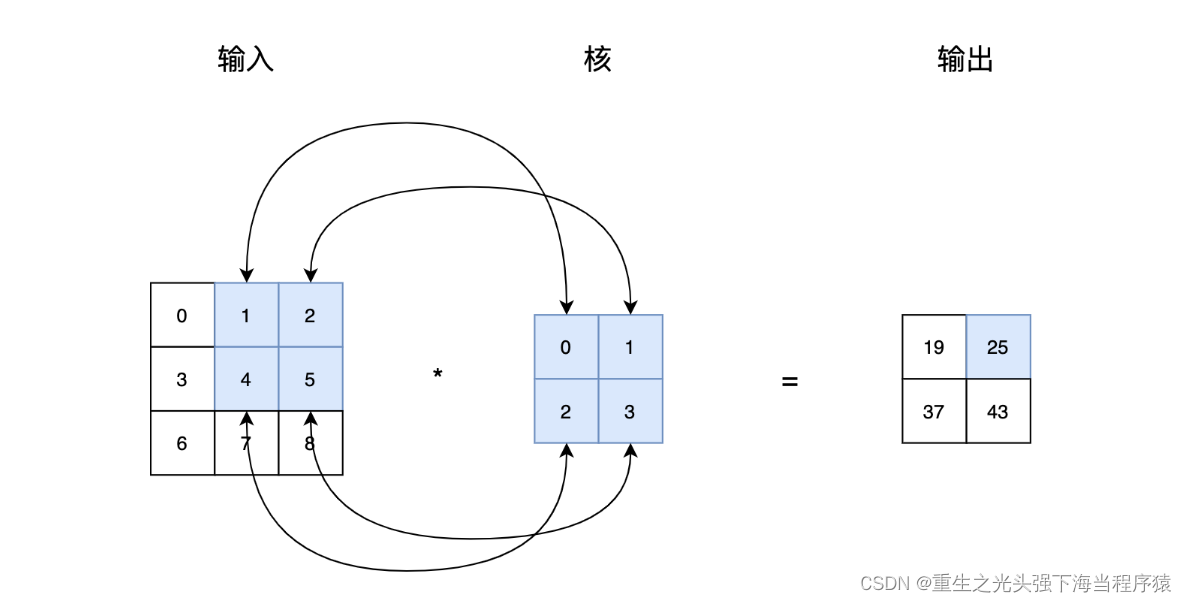
二维卷积:nn.Conv2d()
nn.Conv2d(self, in_channels, out_channels, kernel_size, stride=1,
padding=0, dilation=1, groups=1,
bias=True, padding_mode=‘zeros’)
这个函数的功能是对多个二维信号进行二维卷积,主要参数如下:
in_channels:输入通道数
out_channels:输出通道数,等价于卷积核个数
kernel_size:卷积核尺寸
stride:步长
padding:填充宽度,主要是为了调整输出的特征图大小,一般把 padding 设置合适的值后,保持输入和输出的图像尺寸不变。
dilation:空洞卷积大小,默认为1,这时是标准卷积,常用于图像分割任务中,主要是为了提升感受野
groups:分组卷积设置,主要是为了模型的轻量化,如在 ShuffleNet、MobileNet、SqueezeNet中用到
bias:偏置
卷积尺寸计算
简化版卷积尺寸计算
这里不考虑空洞卷积,假设输入图片大小为 $ I \times I$,卷积核大小为 k × k k \times k k×k,stride 为 s s s,padding 的像素数为 p p p,图片经过卷积之后的尺寸 $ O $ 如下:
O = I − k + 2 × p s + 1 O = \displaystyle\frac{I -k + 2 \times p}{s} +1 O=sI−k+2×p+1
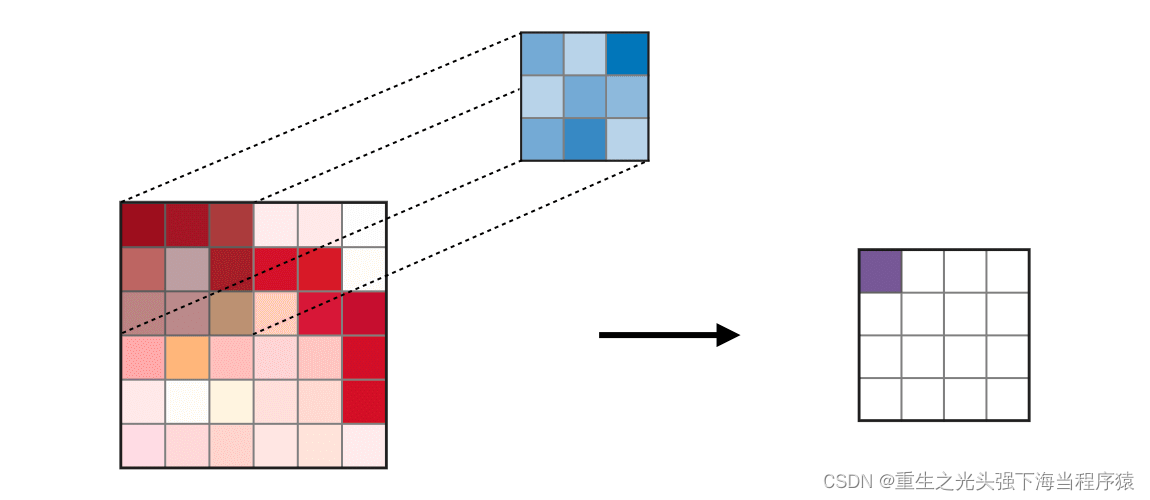
下面例子的输入图片大小为 5 × 5 5 \times 5 5×5,卷积大小为 3 × 3 3 \times 3 3×3,stride 为 1,padding 为 0,所以输出图片大小为 5 − 3 + 2 × 0 1 + 1 = 3 \displaystyle\frac{5 -3 + 2 \times 0}{1} +1 = 3 15−3+2×0+1=3。
完整版卷积尺寸计算
完整版卷积尺寸计算考虑了空洞卷积,假设输入图片大小为 $ I \times I$,卷积核大小为 k × k k \times k k×k,stride 为 s s s,padding 的像素数为 p p p,dilation 为 d d d,图片经过卷积之后的尺寸 $ O $ 如下:。
O = I − d × ( k − 1 ) + 2 × p − 1 s + 1 O = \displaystyle\frac{I - d \times (k-1) + 2 \times p -1}{s} +1 O=sI−d×(k−1)+2×p−1+1
卷积网络示例
这里使用 input*channel 为 3,output_channel 为 1 ,卷积核大小为
3
×
3
3 \times 3
3×3 的卷积核**nn.Conv2d(3, 1, 3)**,使用nn.init.xavier_normal*()方法初始化网络的权值。代码如下:
import os
import torch.nn as nn
from PIL import Image
from torchvision import transforms
from matplotlib import pyplot as plt
from common_tools import transform_invert, set_seed
set_seed(3) # 设置随机种子
# ================================= load img ==================================
path_img = os.path.join(os.path.dirname(os.path.abspath(file)), “imgs”, “lena.png”)
print(path_img)
img = Image.open(path_img).convert(‘RGB’) # 0~255
# convert to tensor
img_transform = transforms.Compose([transforms.ToTensor()])
img_tensor = img_transform(img)
# 添加 batch 维度
img_tensor.unsqueeze_(dim=0) # CHW to BCH*W
# ================================= create convolution layer ==================================
# ================ 2d
flag = 1
# flag = 0
if flag:
conv_layer = nn.Conv2d(3, 1, 3) # input:(i, o, size) weights:(o, i , h, w)
# 初始化卷积层权值
nn.init.xavier_normal_(conv_layer.weight.data)
# nn.init.xavier_uniform_(conv_layer.weight.data)
# calculation
img_conv = conv_layer(img_tensor)
# ================ transposed
# flag = 1
flag = 0
if flag:
conv_layer = nn.ConvTranspose2d(3, 1, 3, stride=2) # input:(input_channel, output_channel, size)
# 初始化网络层的权值
nn.init.xavier_normal_(conv_layer.weight.data)
# calculation
img_conv = conv_layer(img_tensor)
# ================================= visualization ==================================
print(“卷积前尺寸:{}\n卷积后尺寸:{}”.format(img_tensor.shape, img_conv.shape))
img_conv = transform_invert(img_conv[0, 0:1, …], img_transform)
img_raw = transform_invert(img_tensor.squeeze(), img_transform)
plt.subplot(122).imshow(img_conv, cmap=‘gray’)
plt.subplot(121).imshow(img_raw)
plt.show()
卷积前后的图片如下 (左边是原图片,右边是卷积后的图片):
当改为使用nn.init.xavier_uniform_()方法初始化网络的权值时,卷积前后图片如下:
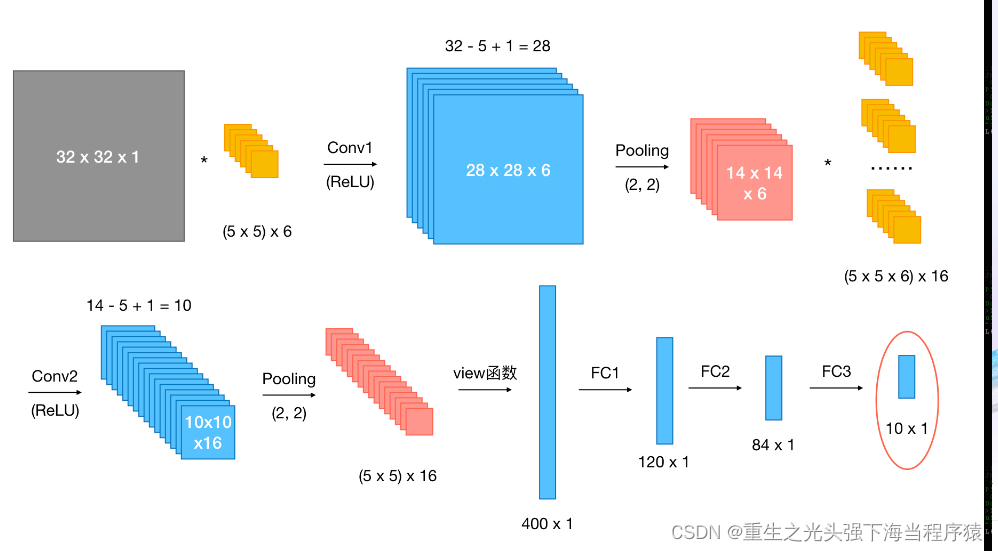
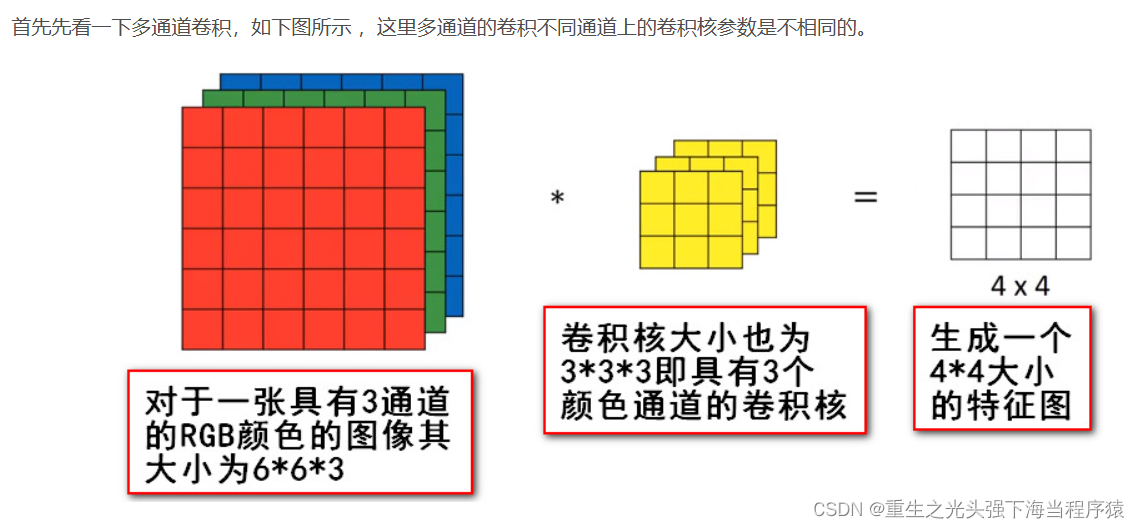
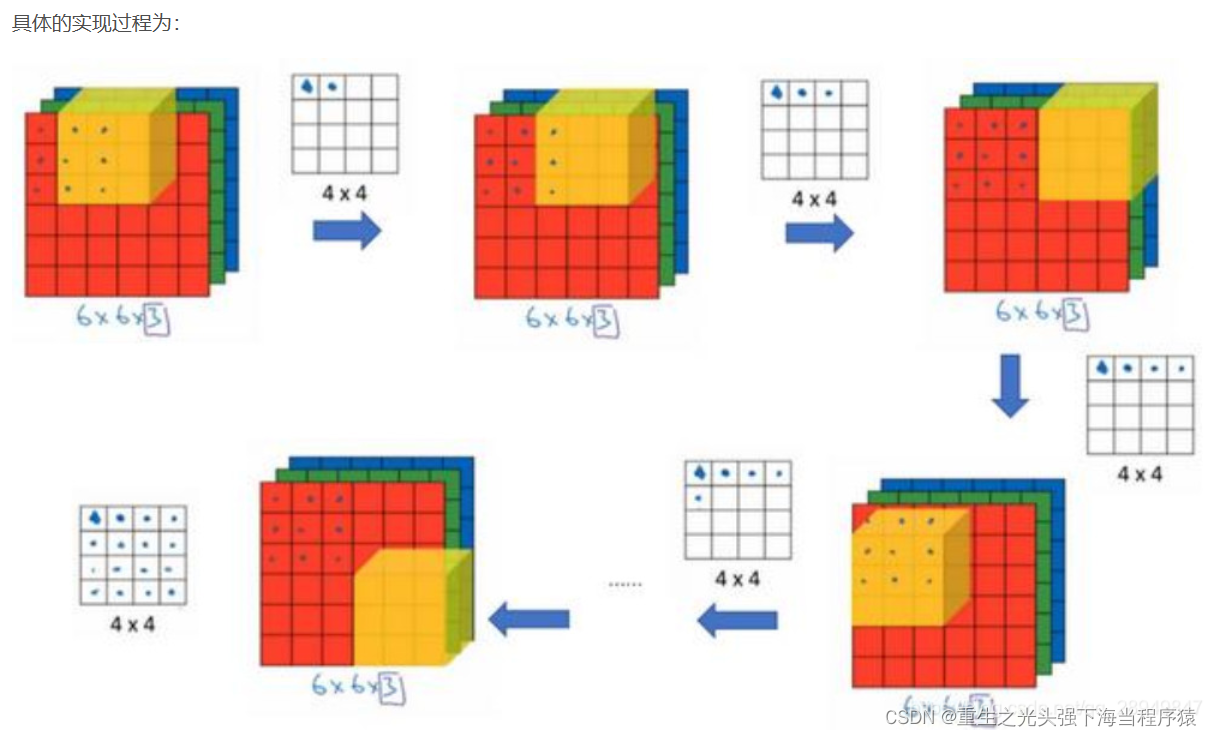
我们通过conv_layer.weight.shape查看卷积核的 shape 是(1, 3, 3, 3),对应是(output_channel, input_channel, kernel_size, kernel_size)。所以第一个维度对应的是卷积核的个数,每个卷积核都是(3,3,3)。虽然每个卷积核都是 3 维的,执行的却是 2 维卷积。下面这个图展示了这个过程。
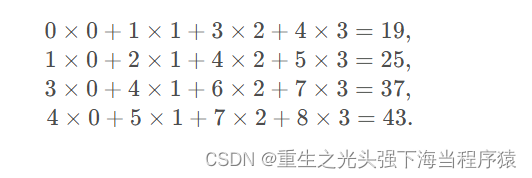
也就是每个卷积核在 input_channel 维度再划分,这里 input_channel 为 3,那么这时每个卷积核的 shape 是(3, 3)。3 个卷积核在输入图像的每个 channel 上卷积后得到 3 个数,把这 3 个数相加,再加上 bias,得到最后的一个输出。
转置卷积:nn.ConvTranspose()
转置卷积又称为反卷积 (Deconvolution) 和部分跨越卷积 (Fractionally strided Convolution),用于对图像进行上采样。
正常卷积如下:
原始的图片尺寸为 4 × 4 4 \times 4 4×4,卷积核大小为 3 × 3 3 \times 3 3×3, p a d d i n g = 0 padding =0 padding=0, s t r i d e = 1 stride = 1 stride=1。由于卷积操作可以通过矩阵运算来解决,因此原始图片可以看作 16 × 1 16 \times 1 16×1 的矩阵 I ∗ 16 × 1 I*{16 \times 1} I∗16×1,卷积核可以看作 4 × 16 4 \times 16 4×16 的矩阵 K ∗ 4 × 16 K*{4 \times 16} K∗4×16,那么输出是 K ∗ 4 × 16 × I ∗ 16 × 1 = O 4 × 1 K*{4 \times 16} \times I*{16 \times 1} = O_{4 \times 1} K∗4×16×I∗16×1=O4×1 。
转置卷积如下:
原始的图片尺寸为 2 × 2 2 \times 2 2×2,卷积核大小为 3 × 3 3 \times 3 3×3, p a d d i n g = 0 padding =0 padding=0, s t r i d e = 1 stride = 1 stride=1。由于卷积操作可以通过矩阵运算来解决,因此原始图片可以看作 4 × 1 4 \times 1 4×1 的矩阵 I ∗ 4 × 1 I*{4 \times 1} I∗4×1,卷积核可以看作 4 × 16 4 \times 16 4×16 的矩阵 K ∗ 16 × 4 K*{16 \times 4} K∗16×4,那么输出是 K ∗ 16 × 4 × I ∗ 4 × 1 = O 16 × 1 K*{16 \times 4} \times I*{4 \times 1} = O_{16 \times 1} K∗16×4×I∗4×1=O16×1 。
正常卷积核转置卷积矩阵的形状刚好是转置关系,因此称为转置卷积,但里面的权值不是一样的,卷积操作也是不可逆的。
PyTorch 中的转置卷积函数如下:
nn.ConvTranspose2d(self, in_channels, out_channels, kernel_size, stride=1,
padding=0, output_padding=0, groups=1, bias=True,
dilation=1, padding_mode=‘zeros’)
和普通卷积的参数基本相同,不再赘述。
转置卷积尺寸计算
简化版转置卷积尺寸计算
这里不考虑空洞卷积,假设输入图片大小为 $ I \times I$,卷积核大小为 k × k k \times k k×k,stride 为 s s s,padding 的像素数为 p p p,图片经过卷积之后的尺寸 $ O $ 如下,刚好和普通卷积的计算是相反的:
O = ( I − 1 ) × s + k O = (I-1) \times s + k O=(I−1)×s+k
完整版简化版转置卷积尺寸计算
O = ( I − 1 ) × s − 2 × p + d × ( k − 1 ) + o u t p a d d i n g + 1 O = (I-1) \times s - 2 \times p + d \times (k-1) + out_padding + 1 O=(I−1)×s−2×p+d×(k−1)+outpadding+1
转置卷积代码示例如下:
import os
import torch.nn as nn
from PIL import Image
from torchvision import transforms
from matplotlib import pyplot as plt
from common_tools import transform_invert, set_seed
set_seed(3) # 设置随机种子
# ================================= load img ==================================
path_img = os.path.join(os.path.dirname(os.path.abspath(file)), “imgs”, “lena.png”)
print(path_img)
img = Image.open(path_img).convert(‘RGB’) # 0~255
# convert to tensor
img_transform = transforms.Compose([transforms.ToTensor()])
img_tensor = img_transform(img)
# 添加 batch 维度
img_tensor.unsqueeze_(dim=0) # CHW to BCH*W
# ================================= create convolution layer ==================================
# ================ 2d
# flag = 1
flag = 0
if flag:
conv_layer = nn.Conv2d(3, 1, 3) # input:(i, o, size) weights:(o, i , h, w)
# 初始化卷积层权值
nn.init.xavier_normal_(conv_layer.weight.data)
# nn.init.xavier_uniform_(conv_layer.weight.data)
# calculation
img_conv = conv_layer(img_tensor)
# ================ transposed
flag = 1
# flag = 0
if flag:
conv_layer = nn.ConvTranspose2d(3, 1, 3, stride=2) # input:(input_channel, output_channel, size)
# 初始化网络层的权值
nn.init.xavier_normal_(conv_layer.weight.data)
# calculation
img_conv = conv_layer(img_tensor)
# ================================= visualization ==================================
print(“卷积前尺寸:{}\n卷积后尺寸:{}”.format(img_tensor.shape, img_conv.shape))
img_conv = transform_invert(img_conv[0, 0:1, …], img_transform)
img_raw = transform_invert(img_tensor.squeeze(), img_transform)
plt.subplot(122).imshow(img_conv, cmap=‘gray’)
plt.subplot(121).imshow(img_raw)
plt.show()
转置卷积前后图片显示如下,左边原图片的尺寸是 (512, 512),右边转置卷积后的图片尺寸是 (1025, 1025)。
转置卷积后的图片一般都会有棋盘效应,像一格一格的棋盘,这是转置卷积的通病。
关于棋盘效应的解释以及解决方法,推荐阅读Deconvolution And Checkerboard Artifacts。
3.3 池化层、线性层和激活函数层
本章代码:https://github.com/zhangxiann/PyTorch_Practice/blob/master/lesson3/nn_layers_others.py
这篇文章主要介绍了 PyTorch 中的池化层、线性层和激活函数层。
池化层
池化的作用则体现在降采样:保留显著特征、降低特征维度,增大kernel的感受野。 另外一点值得注意:pooling也可以提供一些旋转不变性。 池化层可对提取到的特征信息进行降维,一方面使特征图变小,简化网络计算复杂度并在一定程度上避免过拟合的出现;一方面进行特征压缩,提取主要特征。
有最大池化和平均池化两张方式。
最大池化:nn.MaxPool2d()
nn.MaxPool2d(kernel_size, stride=None, padding=0, dilation=1, return_indices=False, ceil_mode=False)
这个函数的功能是进行 2 维的最大池化,主要参数如下:
kernel_size:池化核尺寸
stride:步长,通常与 kernel_size 一致
padding:填充宽度,主要是为了调整输出的特征图大小,一般把 padding 设置合适的值后,保持输入和输出的图像尺寸不变。
dilation:池化间隔大小,默认为1。常用于图像分割任务中,主要是为了提升感受野
ceil_mode:默认为 False,尺寸向下取整。为 True 时,尺寸向上取整
return_indices:为 True 时,返回最大池化所使用的像素的索引,这些记录的索引通常在反最大池化时使用,把小的特征图反池化到大的特征图时,每一个像素放在哪个位置。
下图 (a) 表示反池化,(b) 表示上采样,© 表示反卷积。
下面是最大池化的代码:
import os
import torch
import torch.nn as nn
from torchvision import transforms
from matplotlib import pyplot as plt
from PIL import Image
from common_tools import transform_invert, set_seed
set_seed(1) # 设置随机种子
# ================================= load img ==================================
path_img = os.path.join(os.path.dirname(os.path.abspath(file)), “imgs/lena.png”)
img = Image.open(path_img).convert(‘RGB’) # 0~255
# convert to tensor
img_transform = transforms.Compose([transforms.ToTensor()])
img_tensor = img_transform(img)
img_tensor.unsqueeze_(dim=0) # CHW to BCH*W
# ================================= create convolution layer ==================================
# ================ maxpool
flag = 1
# flag = 0
if flag:
maxpool_layer = nn.MaxPool2d((2, 2), stride=(2, 2)) # input:(i, o, size) weights:(o, i , h, w)
img_pool = maxpool_layer(img_tensor)
print(“池化前尺寸:{}\n池化后尺寸:{}”.format(img_tensor.shape, img_pool.shape))
img_pool = transform_invert(img_pool[0, 0:3, …], img_transform)
img_raw = transform_invert(img_tensor.squeeze(), img_transform)
plt.subplot(122).imshow(img_pool)
plt.subplot(121).imshow(img_raw)
plt.show()
结果和展示的图片如下:
池化前尺寸:torch.Size([1, 3, 512, 512])
池化后尺寸:torch.Size([1, 3, 256, 256])
nn.AvgPool2d()
torch.nn.AvgPool2d(kernel_size, stride=None, padding=0, ceil_mode=False, count_include_pad=True, divisor_override=None)
这个函数的功能是进行 2 维的平均池化,主要参数如下:
kernel_size:池化核尺寸
stride:步长,通常与 kernel_size 一致
padding:填充宽度,主要是为了调整输出的特征图大小,一般把 padding 设置合适的值后,保持输入和输出的图像尺寸不变。
dilation:池化间隔大小,默认为1。常用于图像分割任务中,主要是为了提升感受野
ceil_mode:默认为 False,尺寸向下取整。为 True 时,尺寸向上取整
count_include_pad:在计算平均值时,是否把填充值考虑在内计算
divisor_override:除法因子。在计算平均值时,分子是像素值的总和,分母默认是像素值的个数。如果设置了 divisor_override,把分母改为 divisor_override。
img_tensor = torch.ones((1, 1, 4, 4))
avgpool_layer = nn.AvgPool2d((2, 2), stride=(2, 2))
img_pool = avgpool_layer(img_tensor)
print(“raw_img:\n{}\npooling_img:\n{}”.format(img_tensor, img_pool))
输出如下:
raw_img:
tensor([[[[1., 1., 1., 1.],
[1., 1., 1., 1.],
[1., 1., 1., 1.],
[1., 1., 1., 1.]]]])
pooling_img:
tensor([[[[1., 1.],
[1., 1.]]]])
加上divisor_override=3后,输出如下:
raw_img:
tensor([[[[1., 1., 1., 1.],
[1., 1., 1., 1.],
[1., 1., 1., 1.],
[1., 1., 1., 1.]]]])
pooling_img:
tensor([[[[1.3333, 1.3333],
[1.3333, 1.3333]]]])
nn.MaxUnpool2d()
nn.MaxUnpool2d(kernel_size, stride=None, padding=0)
功能是对二维信号(图像)进行最大值反池化,主要参数如下:
kernel_size:池化核尺寸
stride:步长,通常与 kernel_size 一致
padding:填充宽度
代码如下:
# pooling
img_tensor = torch.randint(high=5, size=(1, 1, 4, 4), dtype=torch.float)
maxpool_layer = nn.MaxPool2d((2, 2), stride=(2, 2), return_indices=True)
img_pool, indices = maxpool_layer(img_tensor)
# unpooling
img_reconstruct = torch.randn_like(img_pool, dtype=torch.float)
maxunpool_layer = nn.MaxUnpool2d((2, 2), stride=(2, 2))
img_unpool = maxunpool_layer(img_reconstruct, indices)
print(“raw_img:\n{}\nimg_pool:\n{}”.format(img_tensor, img_pool))
print(“img_reconstruct:\n{}\nimg_unpool:\n{}”.format(img_reconstruct, img_unpool))
输出如下:
# pooling
img_tensor = torch.randint(high=5, size=(1, 1, 4, 4), dtype=torch.float)
maxpool_layer = nn.MaxPool2d((2, 2), stride=(2, 2), return_indices=True)
img_pool, indices = maxpool_layer(img_tensor)
# unpooling
img_reconstruct = torch.randn_like(img_pool, dtype=torch.float)
maxunpool_layer = nn.MaxUnpool2d((2, 2), stride=(2, 2))
img_unpool = maxunpool_layer(img_reconstruct, indices)
print(“raw_img:\n{}\nimg_pool:\n{}”.format(img_tensor, img_pool))
print(“img_reconstruct:\n{}\nimg_unpool:\n{}”.format(img_reconstruct, img_unpool))
线性层
线性层又称为全连接层,其每个神经元与上一个层所有神经元相连,实现对前一层的线性组合或线性变换。
代码如下:
inputs = torch.tensor([[1., 2, 3]])
linear_layer = nn.Linear(3, 4)
linear_layer.weight.data = torch.tensor([[1., 1., 1.],
[2., 2., 2.],
[3., 3., 3.],
[4., 4., 4.]])
linear_layer.bias.data.fill_(0.5)
output = linear_layer(inputs)
print(inputs, inputs.shape)
print(linear_layer.weight.data, linear_layer.weight.data.shape)
print(output, output.shape)
输出为:
tensor([[1., 2., 3.]]) torch.Size([1, 3])
tensor([[1., 1., 1.],
[2., 2., 2.],
[3., 3., 3.],
[4., 4., 4.]]) torch.Size([4, 3])
tensor([[ 6.5000, 12.5000, 18.5000, 24.5000]], grad_fn=) torch.Size([1, 4])
激活函数层
假设第一个隐藏层为: H ∗ 1 = X × W ∗ 1 H*{1}=X \times W*{1} H∗1=X×W∗1,第二个隐藏层为: H ∗ 2 = H ∗ 1 × W 2 H*{2}=H*{1} \times W_{2} H∗2=H∗1×W2,输出层为:
$ \begin{aligned} \text { Out } \boldsymbol{p} \boldsymbol{u} \boldsymbol{t} &=\boldsymbol{H}{2} * \boldsymbol{W}{3} &=\boldsymbol{H}{1} * \boldsymbol{W}{2} \boldsymbol{W}*{3} &=\boldsymbol{X} (\boldsymbol{W}{1} \boldsymbol{W}{2} \boldsymbol{W}{3}) &=\boldsymbol{X} {W} \end{aligned} $
如果没有非线性变换,由于矩阵乘法的结合性,多个线性层的组合等价于一个线性层。
激活函数对特征进行非线性变换,赋予了多层神经网络具有深度的意义。下面介绍一些激活函数层。
nn.Sigmoid
计算公式: y = 1 1 + e − x y=\frac{1}{1+e^{-x}} y=1+e−x1
梯度公式: y ′ = y ∗ ( 1 − y ) y^{\prime}=y *(1-y) y′=y∗(1−y)
特性:
输出值在(0,1),符合概率
导数范围是 [0, 0.25],容易导致梯度消失
输出为非 0 均值,破坏数据分布
nn.tanh
计算公式: y = sin x cos x = e x − e − x e − + e − x = 2 1 + e − 2 x + 1 y=\frac{\sin x}{\cos x}=\frac{e^{x}-e^{-x}}{e^{-}+e^{-x}}=\frac{2}{1+e^{-2 x}}+1 y=cosxsinx=e−+e−xex−e−x=1+e−2x2+1
梯度公式: y ′ = 1 − y 2 y^{\prime}=1-y^{2} y′=1−y2
特性:
输出值在(-1, 1),数据符合 0 均值
导数范围是 (0,1),容易导致梯度消失
nn.ReLU(修正线性单元)
计算公式: y = m a x ( 0 , x ) y=max(0, x) y=max(0,x)
梯度公式:KaTeX parse error: Expected '}', got '\right' at position 96: … x<0\end{array}\̲r̲i̲g̲h̲t̲.
特性:
输出值均为正数,负半轴的导数为 0,容易导致死神经元
导数是 1,缓解梯度消失,但容易引发梯度爆炸
针对 RuLU 会导致死神经元的缺点,出现了下面 3 种改进的激活函数。
nn.LeakyReLU
有一个参数negative_slope:设置负半轴斜率
nn.PReLU
有一个参数init:设置初始斜率,这个斜率是可学习的
nn.RReLU
R 是 random 的意思,负半轴每次斜率都是随机取 [lower, upper] 之间的一个数
lower:均匀分布下限
upper:均匀分布上限
















 1148
1148

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









