







 本文介绍了如何通过PLSF指令控制伺服电机正反转,ZRN指令实现回零,以及使用DRVA指令进行绝对定位,详细说明了涉及的参数如D700、D20、D100和D200在控制过程中的作用。
本文介绍了如何通过PLSF指令控制伺服电机正反转,ZRN指令实现回零,以及使用DRVA指令进行绝对定位,详细说明了涉及的参数如D700、D20、D100和D200在控制过程中的作用。
1.点动控制
使用PLSF指令控制伺服电机正转与反转
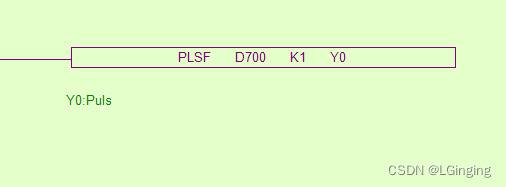
通过控制D700,来控制电机速度与方向;
2.回零控制
使用ZRN指令控制电机相对回零;
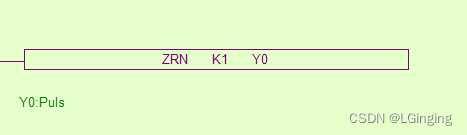
将对应参数输入到指定寄存器中,即可实现回零动作;
3.绝对定位控制
使用DRVA指令控制电机旋转到指定位置;
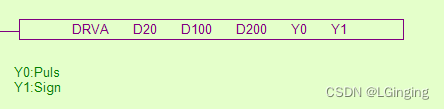
D20:目标位置;
D100:运行速度;
D200:加速时间
1.点动控制
使用PLSF指令控制伺服电机正转与反转
通过控制D700,来控制电机速度与方向;
2.回零控制
使用ZRN指令控制电机相对回零;
将对应参数输入到指定寄存器中,即可实现回零动作;
3.绝对定位控制
使用DRVA指令控制电机旋转到指定位置;
D20:目标位置;
D100:运行速度;
D200:加速时间
 194
5951
716
194
5951
716

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


























