







 本文详细介绍了IoU、GIoU、DIoU和CIoU的概念,讨论了它们在深度学习中的优缺点,并提供了Python代码实现。IoU作为经典指标,存在不相交时无梯度回传的问题,GIoU和DIoU分别尝试解决这一问题,而CIoU进一步考虑了长宽比,以提高损失函数的优化效率。
本文详细介绍了IoU、GIoU、DIoU和CIoU的概念,讨论了它们在深度学习中的优缺点,并提供了Python代码实现。IoU作为经典指标,存在不相交时无梯度回传的问题,GIoU和DIoU分别尝试解决这一问题,而CIoU进一步考虑了长宽比,以提高损失函数的优化效率。
一、IoU、GIoU、DIoU、CIoU详解:
(1)IoU
IoU 的全称为交并比(Intersection over Union),其计算是 “预测的边框” 和 “真实的边框” 的交集和并集的比值。计算过程可以由下图表示:
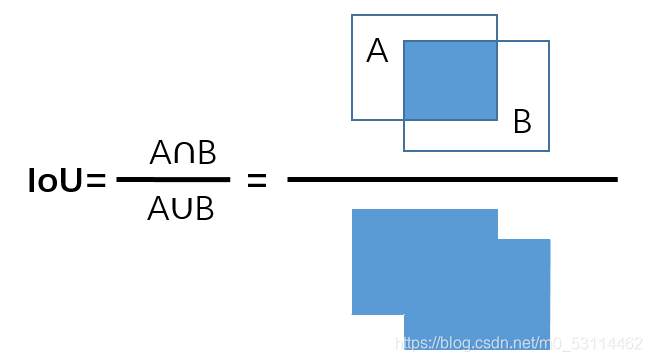
由图可知IoU的值域为[0, 1]。
IoU的优点:
1、IOU可以作为损失函数,IoU loss=1-IOU。但是当两个物体不相交时无回传梯度。
2、 IOU对尺度变化具有不变性,即不受两个物体尺度大小的影响。
IoU的缺点:
1、当预测框和真实框不相交时,IoU(A,B)=0时,不能反映A,B距离的远近,此时损失函数不可导,IoU Loss 无法优化两个框不相交的情况。
2、假设预测框和真实框的大小都确定,只要两个框的相交值是确定的,其IoU值是相同时,IoU值不能反映两个框是如何相交的。
(2)GIoU
GIoU是为克服IoU的缺点同时充分利用优点而提出的,GIoU计算如下:
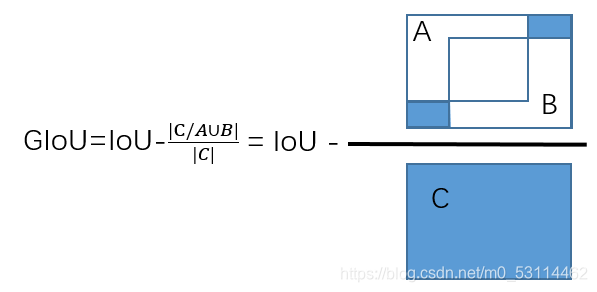
上图C是包含A与B的最小框。
GIoU的值域为(-1, 1]。
GIoU的优点:
1、GIoU和IoU一样,可以作为损失函数,GIoU Loss = 1 - GIoU。
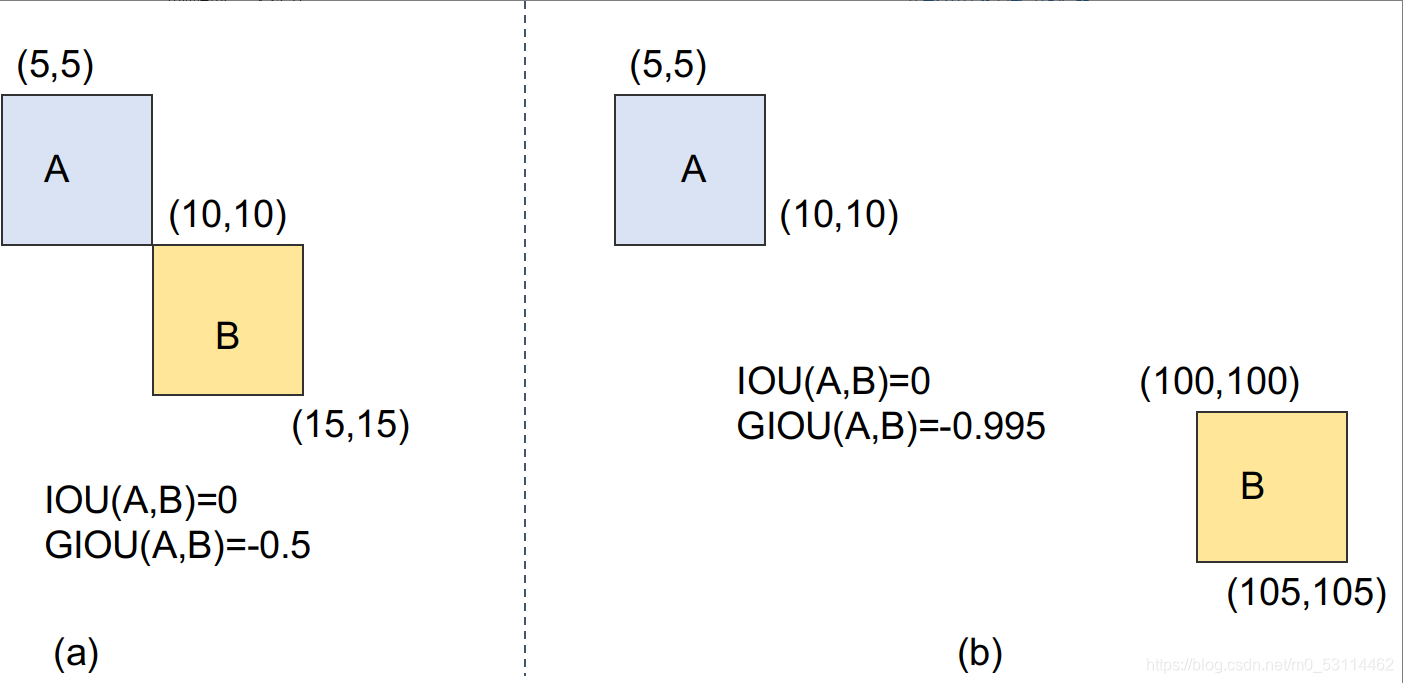
2、GIoU能够更好地反应相交情况。如下图,虽然两种情况下IOU一致,但是(a)中相交的更为整齐,因此GIOU要比(b)中大。
GIoU缺点
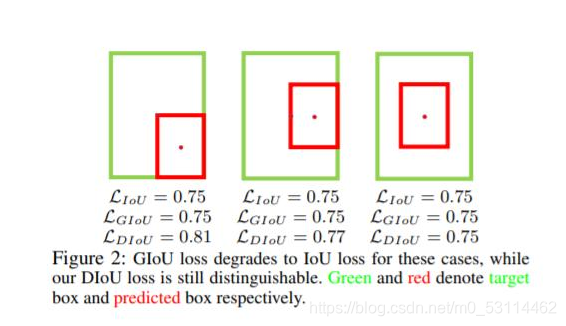
当目标框完全包裹预测框的时候,IoU和GIoU的值都一样,此时GIoU退化为IoU, 无法区分其相对位置关系。
(3)DIoU
基于GIoU的缺点,DIoU被提出。其论文为:Distance-IoU Loss: Faster and Better Learning for Bounding Box Regression
论文给出DIoU Loss为:

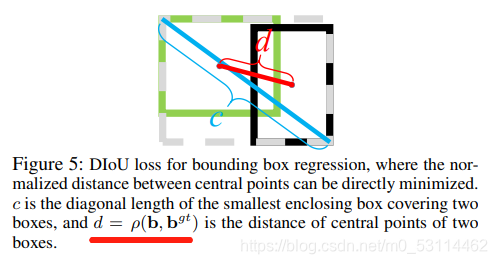
上图中绿色框为目标框,黑色框为预测框,灰色框为两者的最小外界矩形框,d表示目标框和真实框的中心点距离,c表示最小外界矩形框的距离。
DIoU的性质:
1、尺度不变性。
2、DIoU Loss可以直接优化2个框直接的距离,比GIoU Loss收敛速度更快。
3、对于目标框包裹预测框的这种情况,DIoU Loss可以收敛的很快,而GIoU Loss此时退化为IoU Loss收敛速度较慢
(4)CIoU
一个好的目标框回归损失应该考虑三个重要的几何因素:重叠面积、中心点距离、长宽比。
GIoU:为了归一化坐标尺度,利用IoU,并初步解决IoU为零的情况。
DIoU:DIoU损失同时考虑了边界框的重叠面积和中心点距离。
然而,anchor框和目标框之间的长宽比的一致性也是极其重要的。基于此,论文作者提出了Complete IoU Loss。
CIoU Loss又引入一个box长宽比的惩罚项,该Loss考虑了box的长宽比,定义如下:
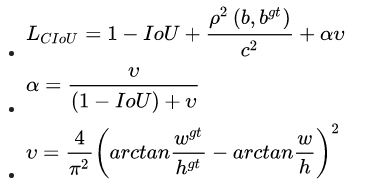
上述损失函数中,CIoU比DIoU多出了α和v这两个参数。其中α是用于平衡比例的参数。v用来衡量anchor框和目标框之间的比例一致性。
从α参数的定义可以看出,损失函数会更加倾向于往重叠区域增多方向优化,尤其是IoU为零的时候。
二、Python代码实现:
这里是实现IoU、GIoU、DIoU、CIoU并非实现其Loss。代码如下:
定义框BBox类:
import math
def euclidean_distance(p1, p2):
'''
计算两个点的欧式距离
'''
x1, y1 = p1
x2, y2 = p2
return math.sqrt((x2-x1)**2 + (y2-y1)**2)
class BBox:
def __init__ 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 3206
3206

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











