







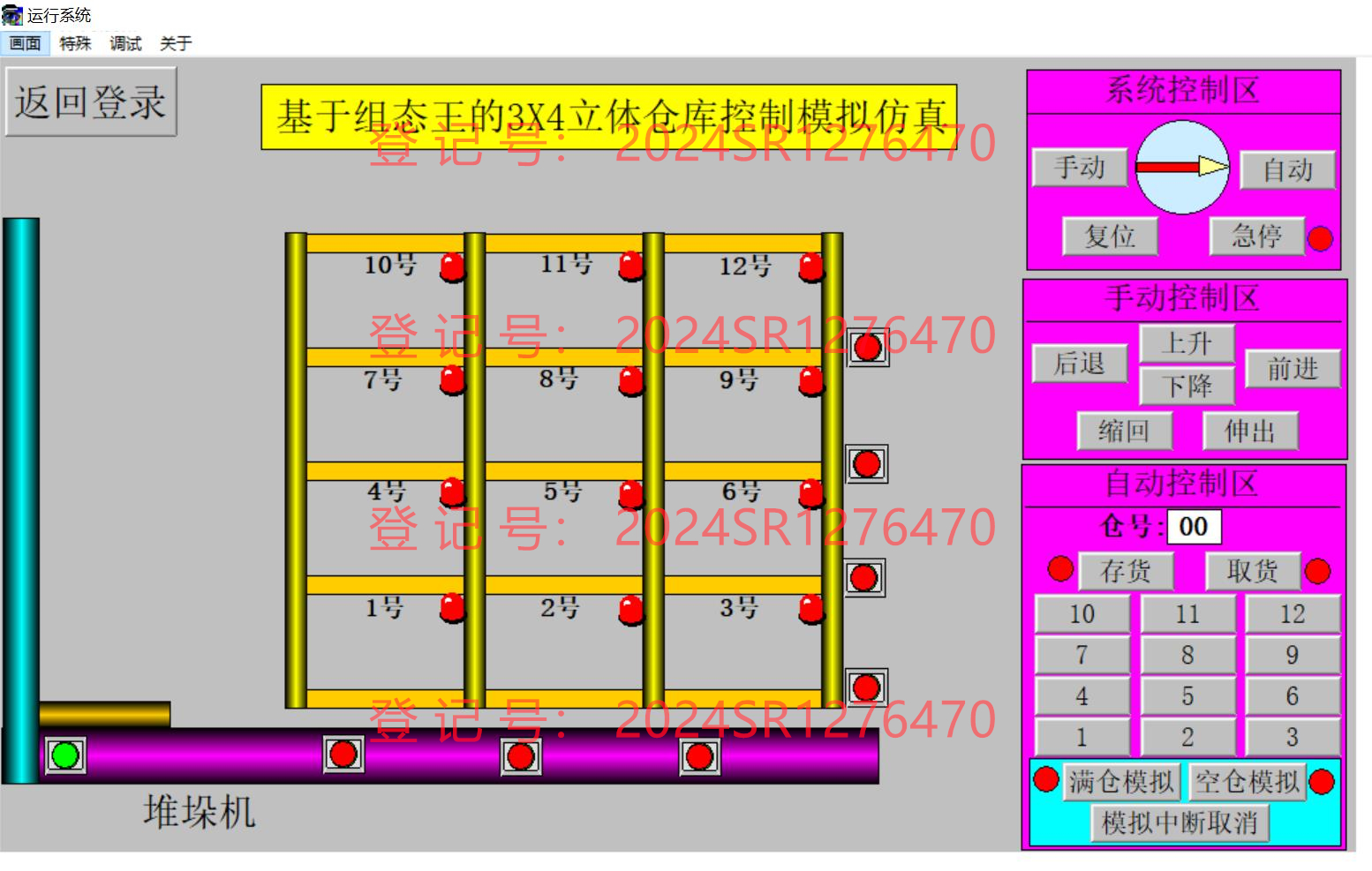
功能介绍:
①堆垛机的运动是由电机驱动的;
②堆垛机必须有三个自由度,即可以实现:上下、左右、前后;
③堆垛机的前进(或者后退)运动和上(下)运动可同时进行;
④每个仓位必须有检测到位装置(微动开关);
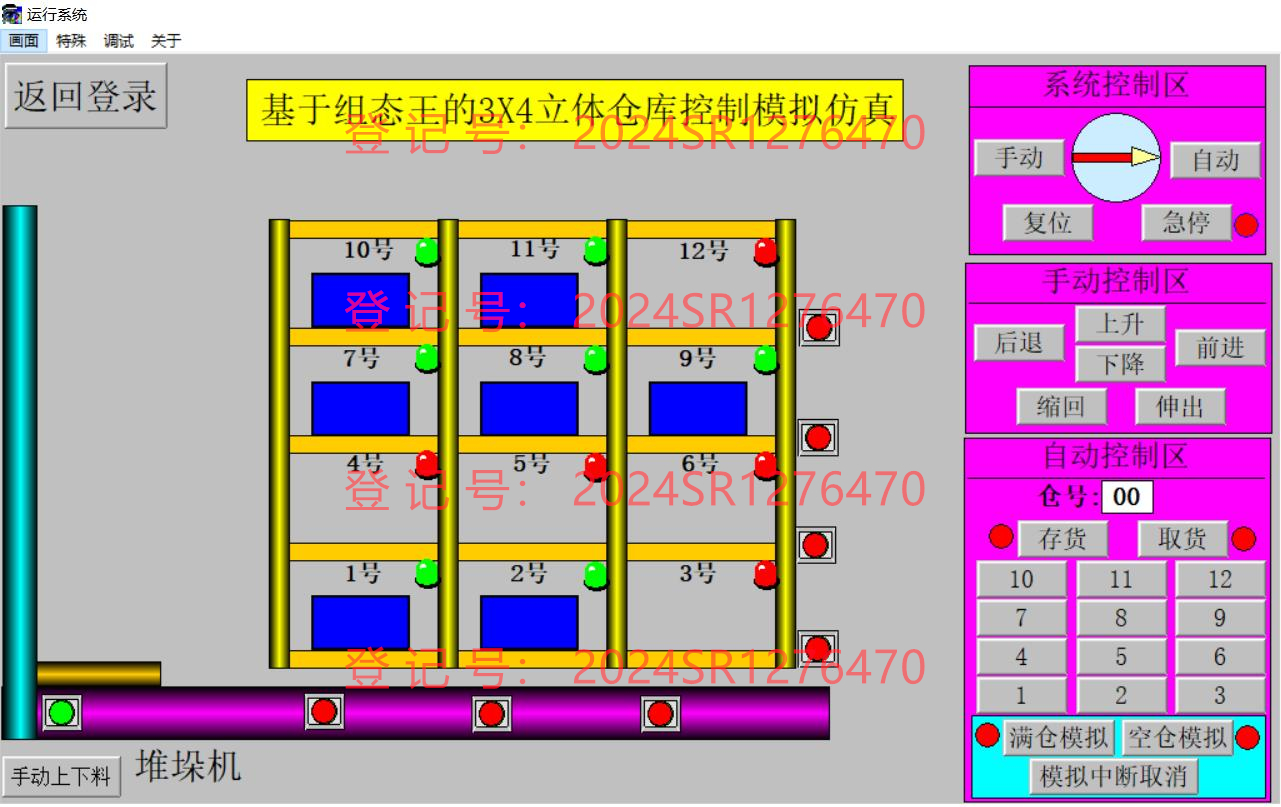
⑤自动化立体仓库可以自动运行也可以手动操作;
⑥堆垛机前进、后退和上下运动时必须有超限位保护;
⑦必须设有急停按钮,以防发生意外。
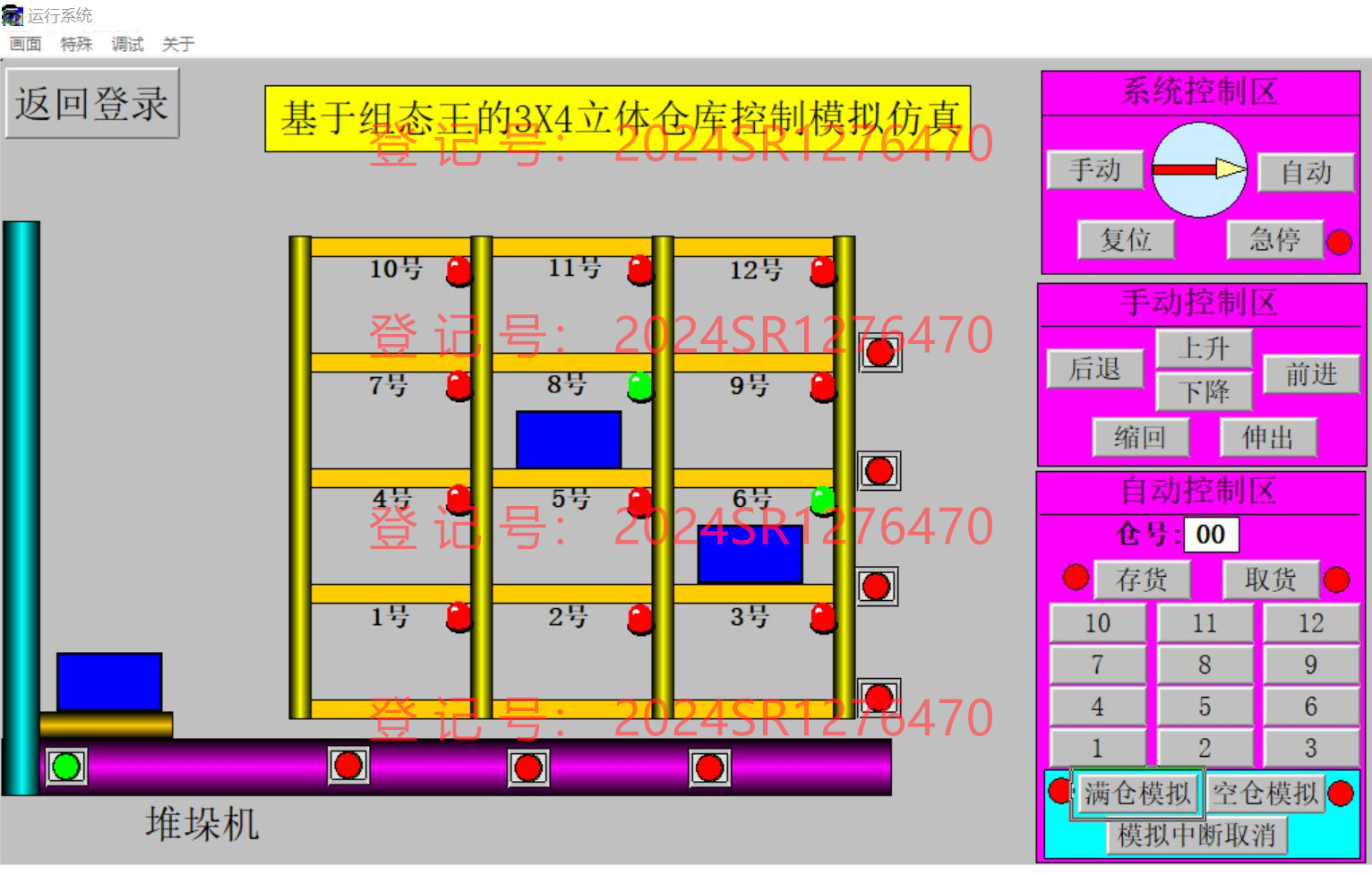
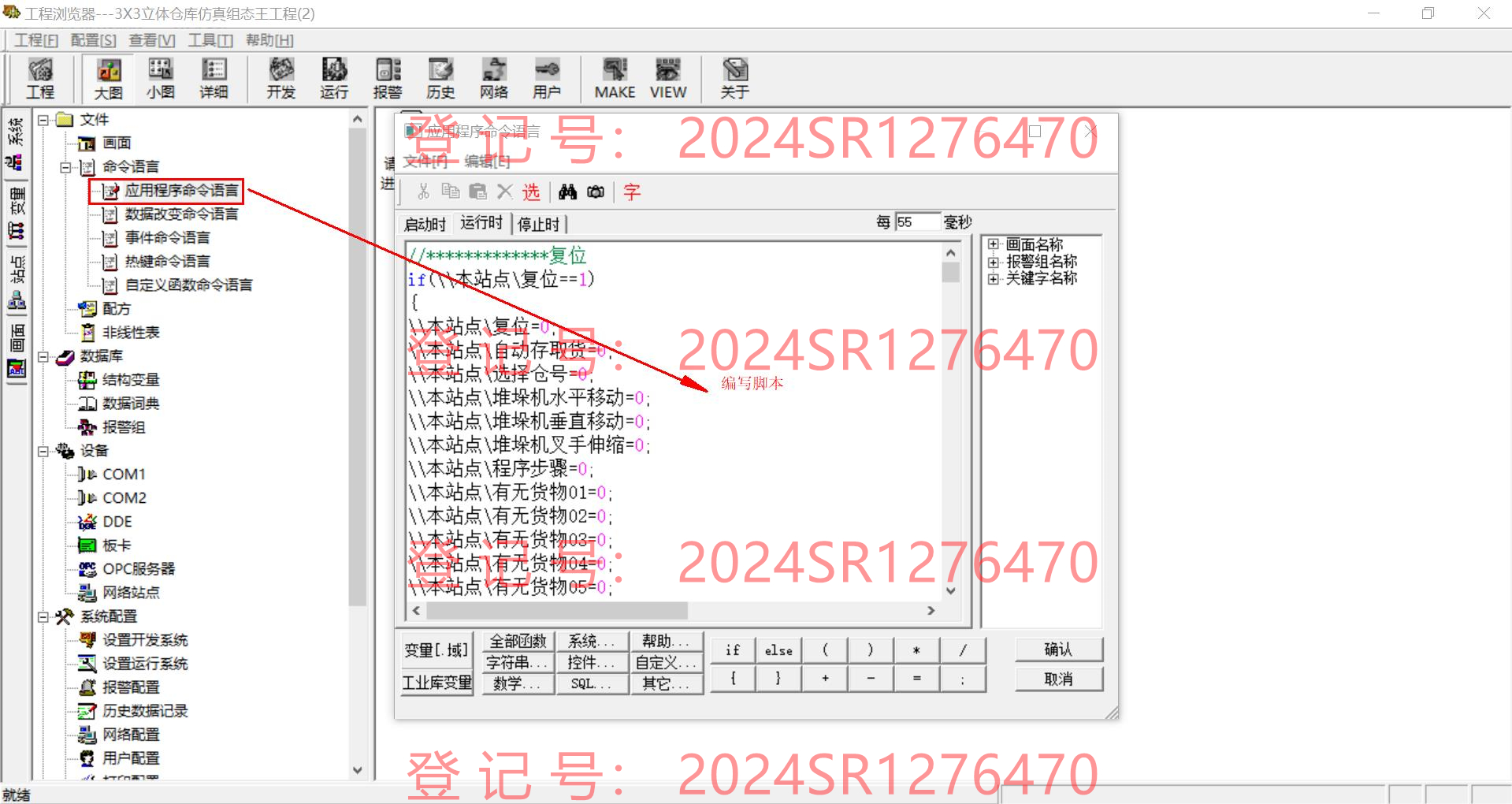
⑧首先将手/自动旋钮拨到自动,在接通电源的状态下,每个部位复位,即回到初始位置(零位)。立体仓库的坐标定位是以零位开始的;
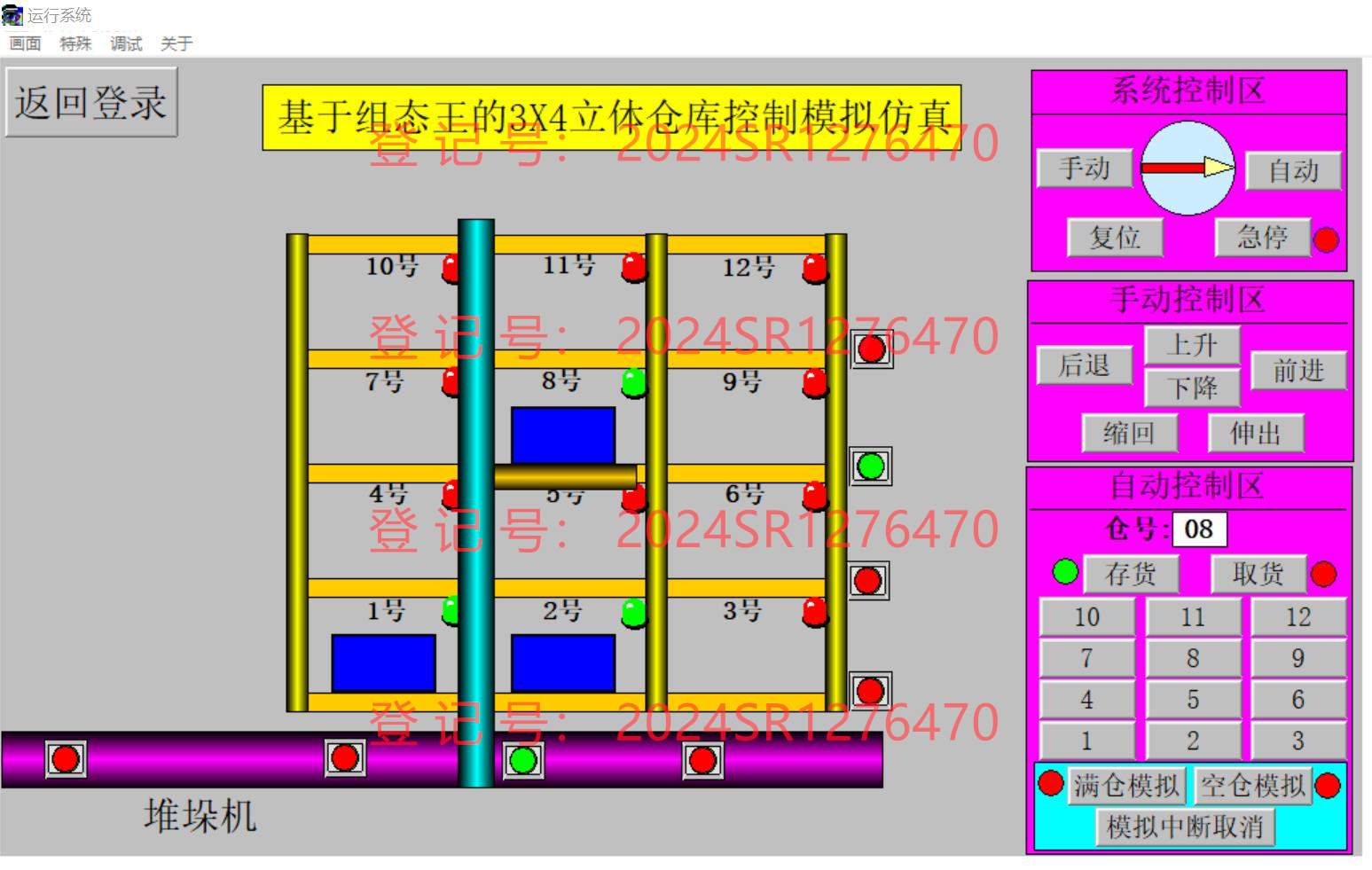
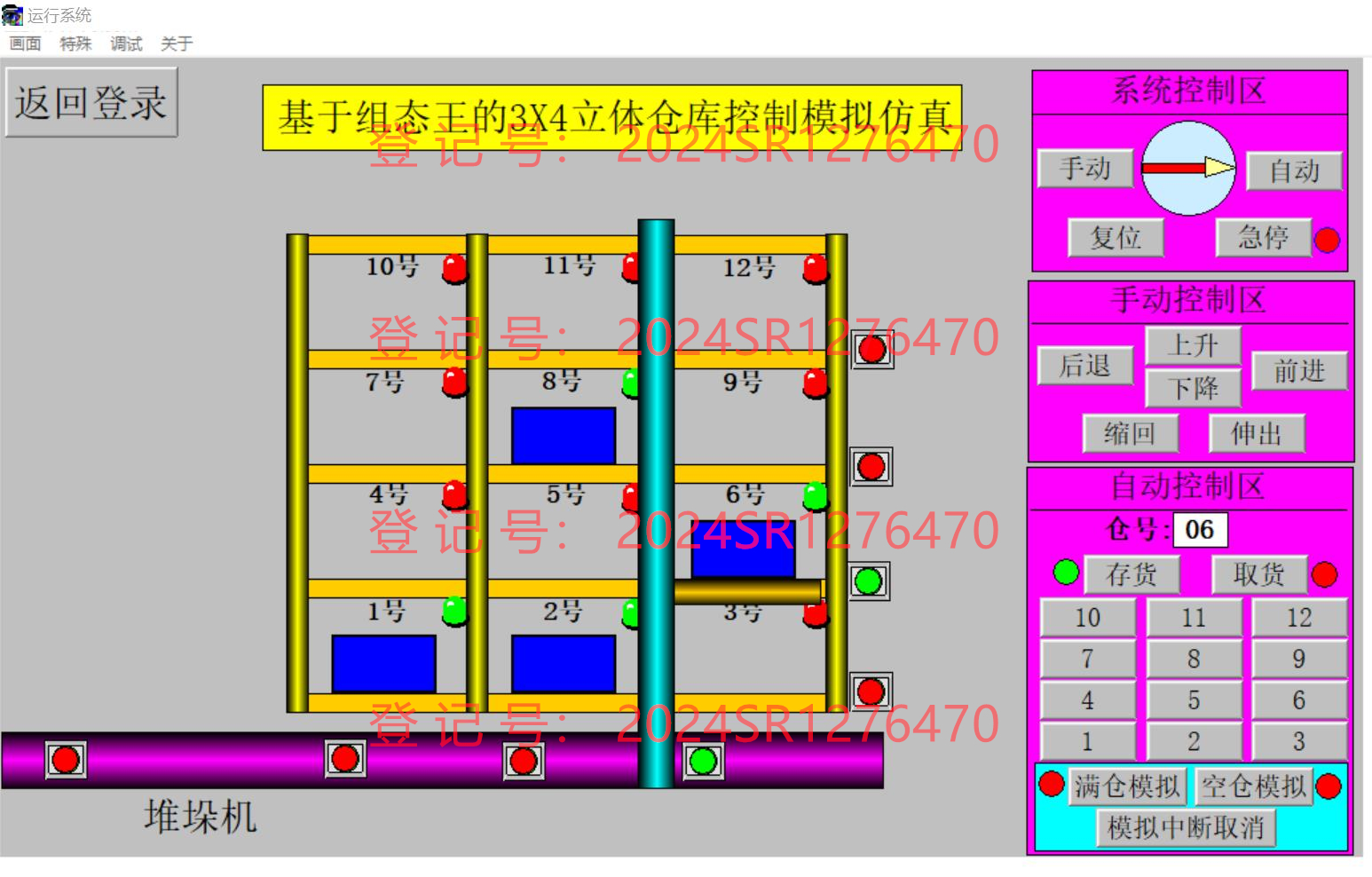
⑨当要进行存货操作时,选择将要送货物的位置,然后按动相对应的按键,在HMI界面上就会显示要运送货物的仓位号,当堆垛机托盘上面有货物时,按存货按钮后,物品将被自动送入事先选择的仓库货位。如果在指定的位置内有货物,或者如果没有货物在托盘中,库存将不会被执行。存货命令结束后,堆垛机将自动返回初始位置;
⑩当要取货时,选择将要进行取操作的仓位号,然后选择取货按钮,将在HMI界面中显示出将要取货的仓位号,如果货位中有货物,堆垛机托盘内无货物时,堆垛机可自动将货物取出。当所选仓位内无货物时,或者堆垛机托盘内有货物,则取货命令不被执行;
⑪存取货指令被及时执行后,自动归位;
⑫整个装置设有急停按钮,以防发生意外。
=========================
三、运行环境:组态王6.55或者以上版本
=========================
四、售后服务:
本商品属于我本人原创,对于本商品内容的程序设计问题,免费帮忙亲排疑解答!售后无忧!
=========================
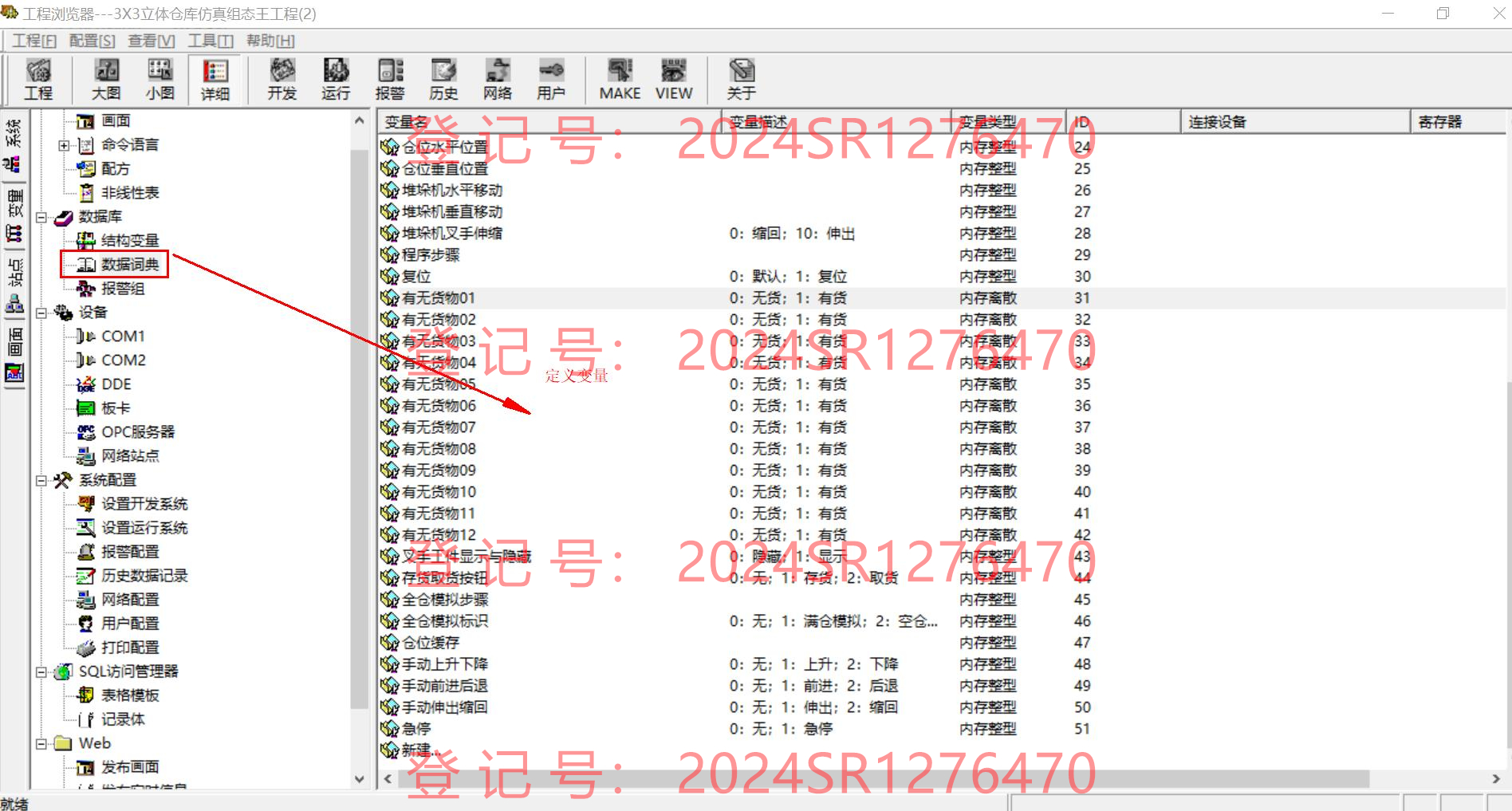
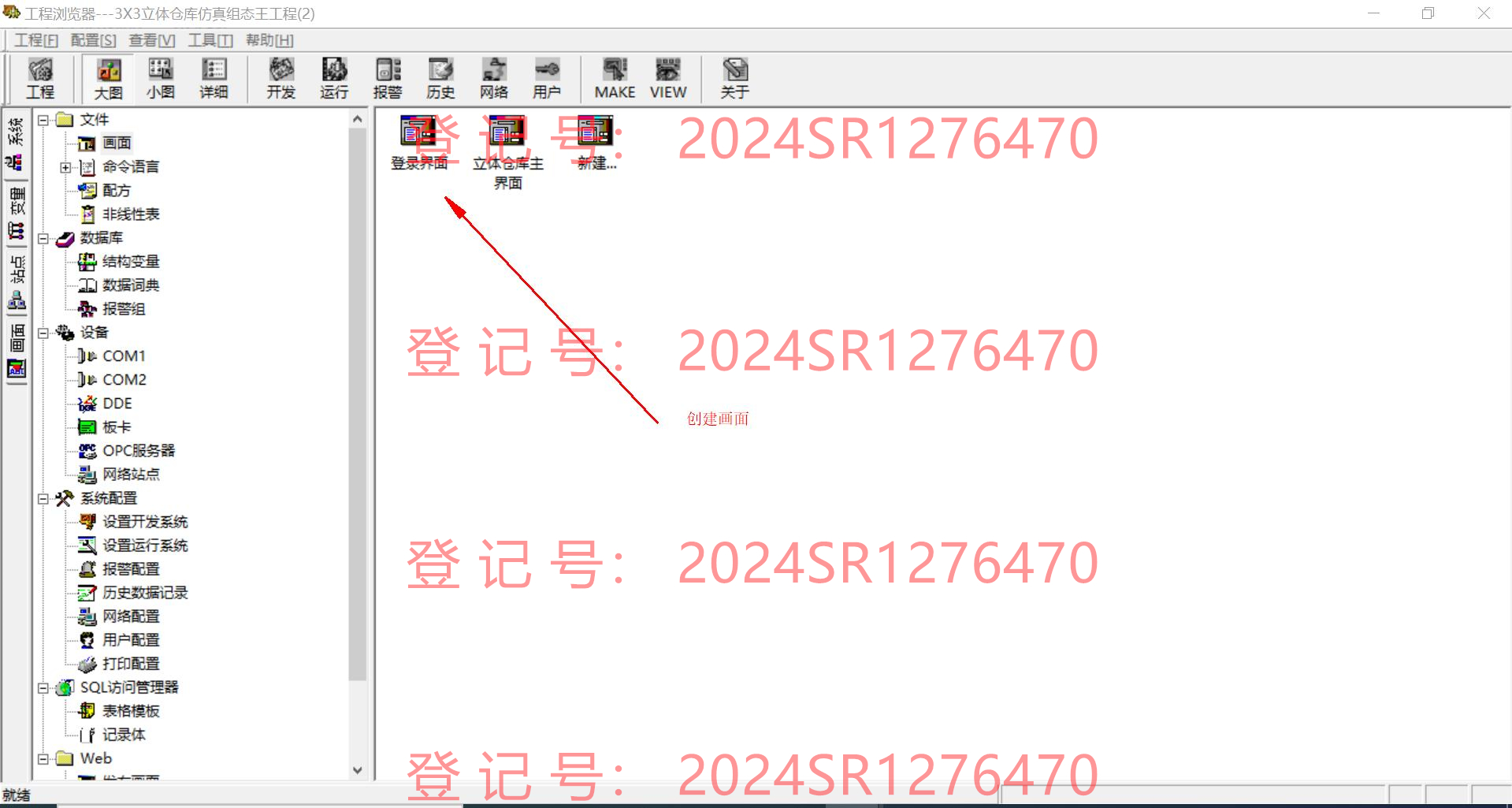
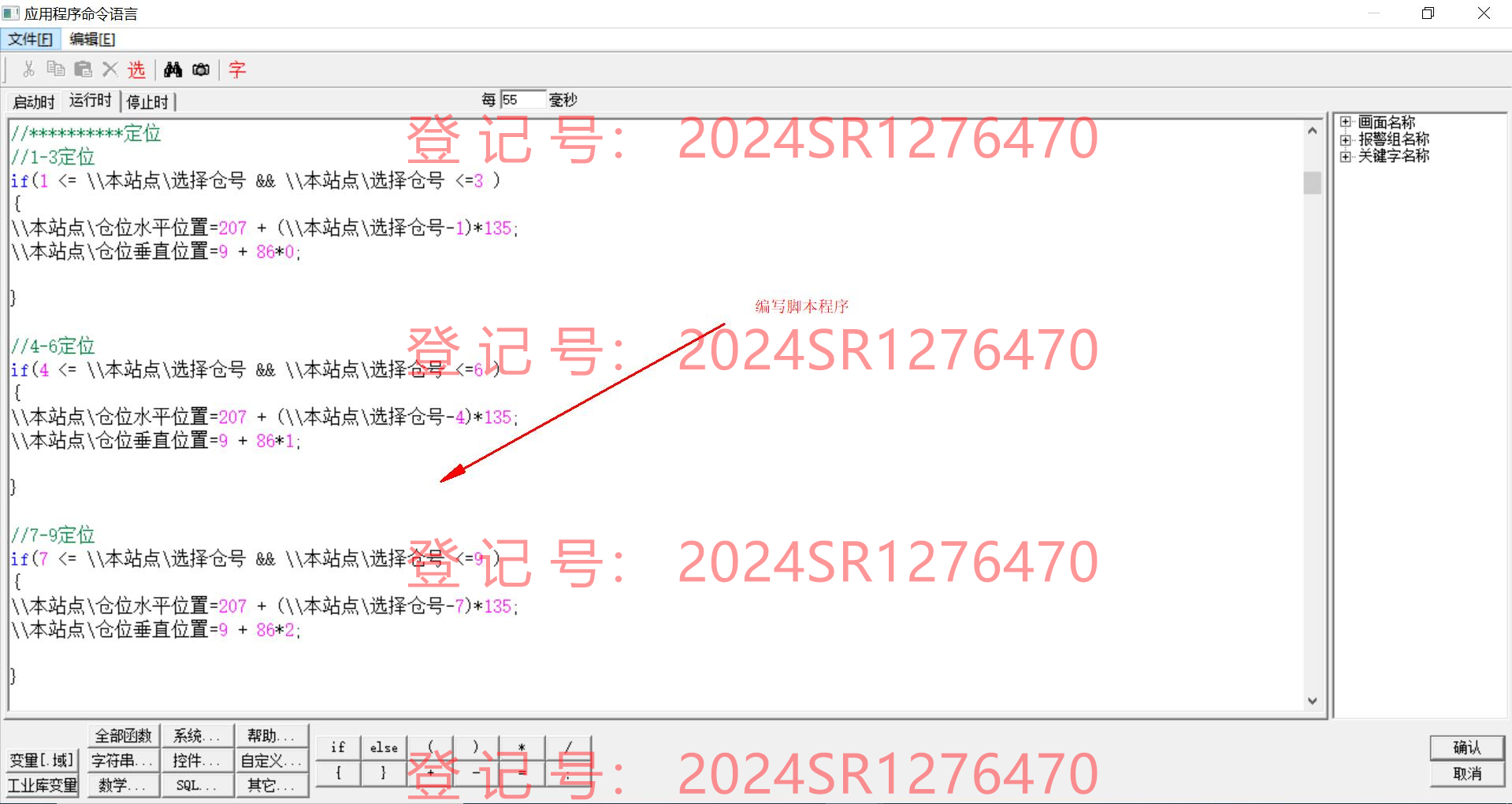
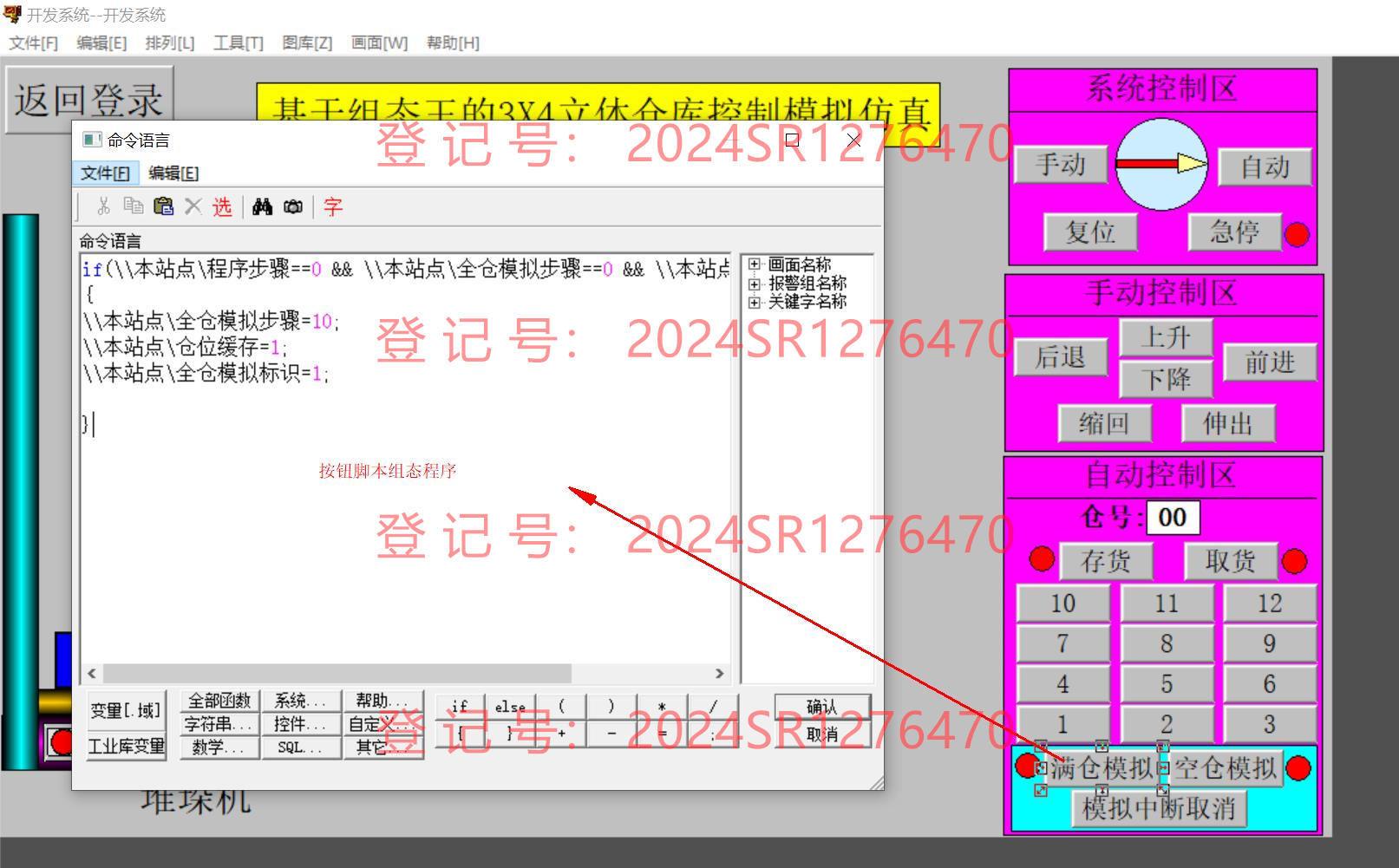
下面对基于组态王6.55 的3X4立体仓库控制仿真组态工程过程介绍:
===========================

















 1017
1017

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









