







链接:连续体机器人的正逆向运动学模型-(3)利用DH参数法解决正向运动学 - 知乎
章节分布
- 概述
- 介绍在传统机器中使用的DH参数法和雅可比矩阵jacobian
- 利用DH参数法解决机器人的正向运动学
- 利用jacobian的伪逆迭代解决机器人的逆向运动学
机器人的躯干形状描述
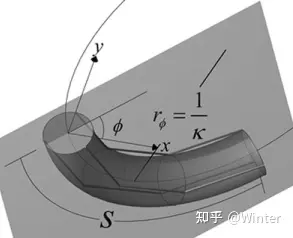
连续体机器人中的运动学建模,常曲率经常被视为一种理想的特征。 由于这个特性, 可以将连续体机器人的形状参数和它的关节联系起来,就可以建立清晰的运动学模型,包括速度微分运动学模型。
换句话说,就是圆弧中的一段,当然这个假设确实是有一定问题的,在负重的情况下,模型就有较大的偏离,就会造成误差比较大。
拟合虚拟关节在躯干上
这里我们直接上图来了解,使用solidwork

 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









