



 文章介绍了DH参数法在传统机器人正向运动学中的作用,以及如何用雅可比矩阵的伪逆解决逆向运动学问题。此外,文章探讨了连续体机器人,这种由弹性材料和驱动绳索构成的超冗余机器人在医疗领域的应用,特别是在内窥镜手术中的安全优势。
文章介绍了DH参数法在传统机器人正向运动学中的作用,以及如何用雅可比矩阵的伪逆解决逆向运动学问题。此外,文章探讨了连续体机器人,这种由弹性材料和驱动绳索构成的超冗余机器人在医疗领域的应用,特别是在内窥镜手术中的安全优势。
章节分布
- 概述
- 介绍在传统机器中使用的DH参数法和雅可比矩阵jacobian
- 利用DH参数法解决机器人的正向运动学
- 利用jacobian的伪逆迭代解决机器人的逆向运动学
概述
我们平时所熟知的机器人都是硬机器人,它们的设计是基于离散的刚性连杆串联。比如我们常见的机械臂,他们的精确度很高,可以完美的进行重复任务,但还有一类机器人就是软体机器人,这类机器人有时候会使用气动人工肌肉的,在这大类机器人中,有一个分类就是连续体机器人。
机械结构
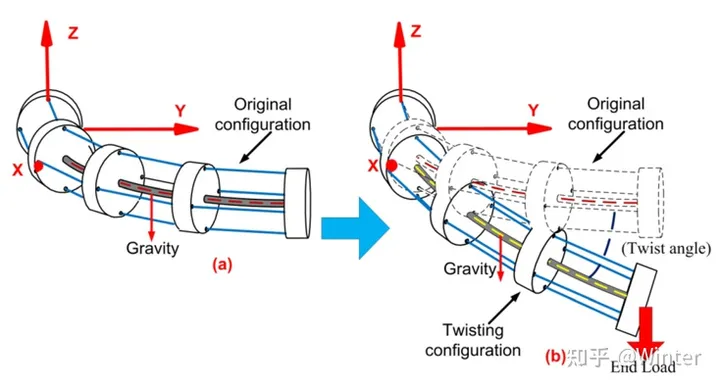
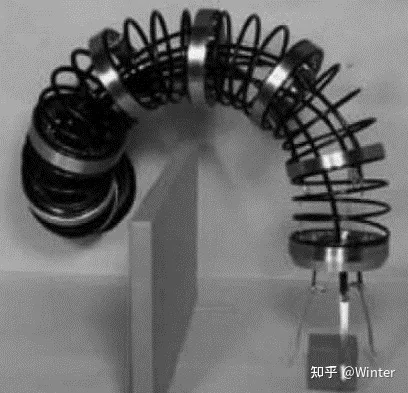
连续的机器人由多个运动关节串联而成,每一节的内部是由弹性材料,比如超弹性杆构成,已提供支撑以及弯曲的作用,这个弹性杆相当于一个万向节,周边成相互 120 或者90度角分布的驱动绳索。

区别
连续体机器人属于超冗余的机器人,但也不等同于传统的超冗余机器人。
应用
目前比较成熟的领域应该在医疗方面,从前面的图中也可以看到,他有着更长的工作范围,可以在内窥镜上进入患者的体内,并且它整个结构也并不同于传统的刚体机器人,他相较于与患者的交互来说更加安全。
联想
在柯南的面具大蛇案件中,感觉原理上就很类似于连续体机器人。
下一章:
- 介绍在传统机器中使用的DH参数法和雅可比矩阵jacobian
参考资料
知乎:https://zhuanlan.zhihu.com/p/638117473
《Robot Modeling and Control》 by Mark W. Spong
Design and Kinematic Modeling of Constant Curvature Continuum Robots: A Review

















 1355
1355

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









