







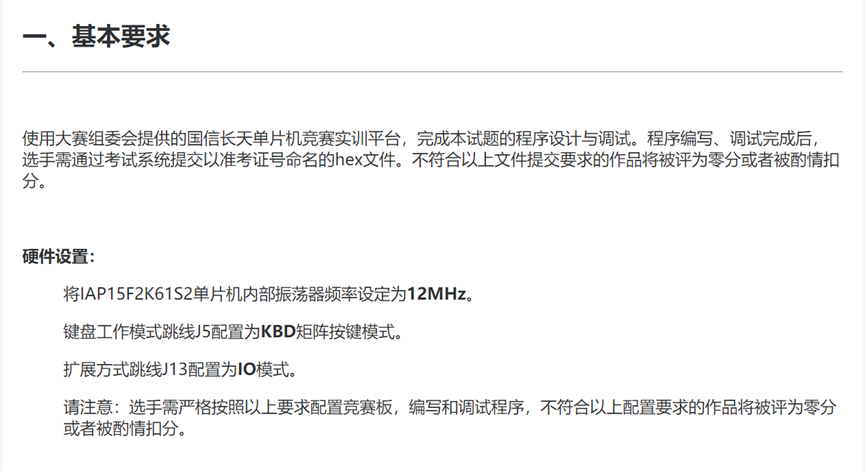
也是今天才注意到4T上面有三套模拟题,赶紧做了一套,嗯~,逻辑不复杂,提供的代码一个没用到,就是超声波和串口,这个时候就是定时器的分配了。
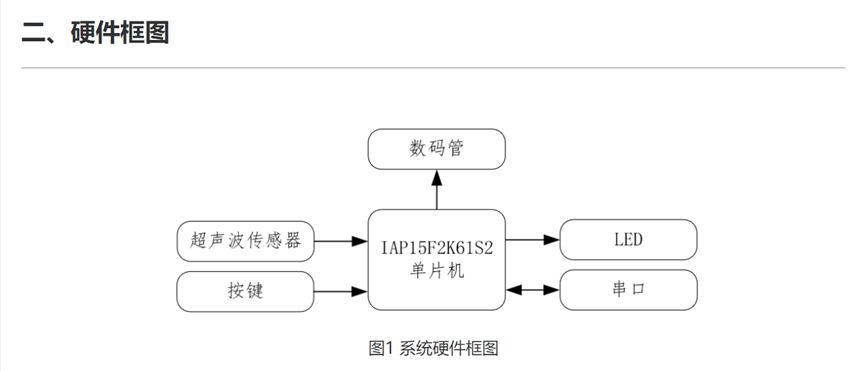
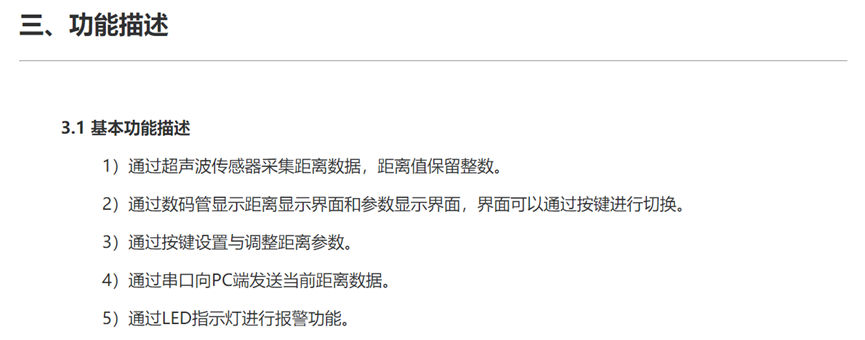
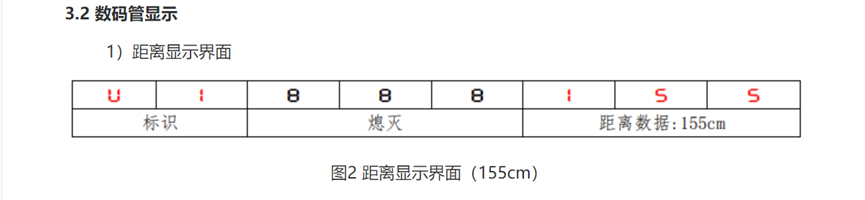
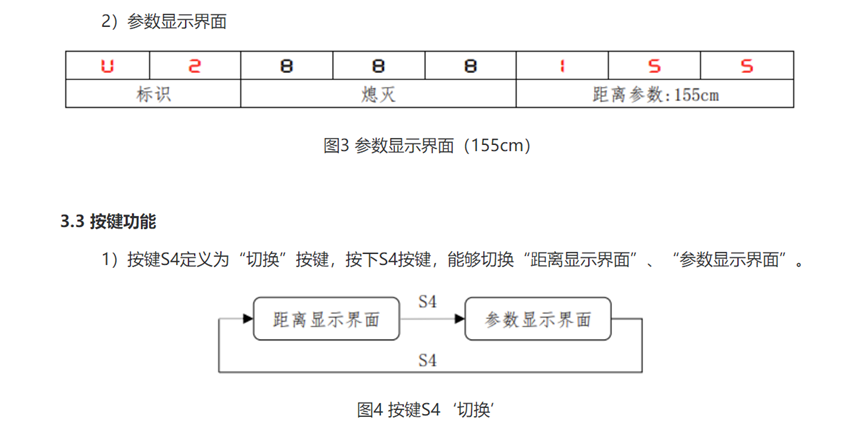
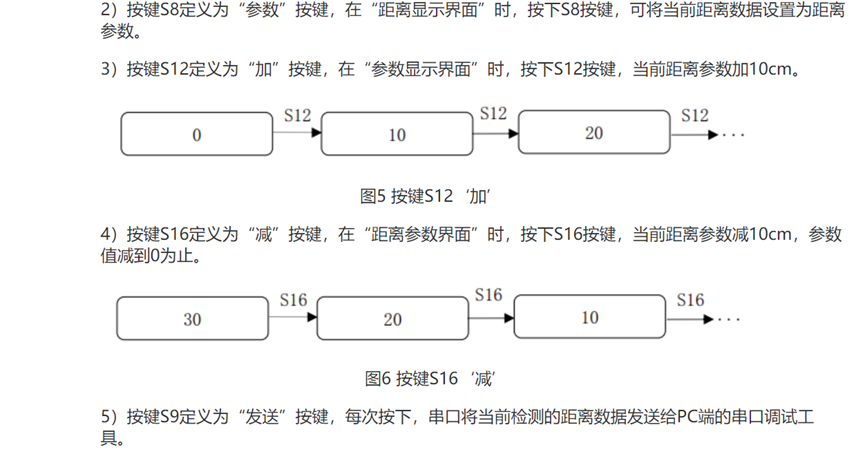
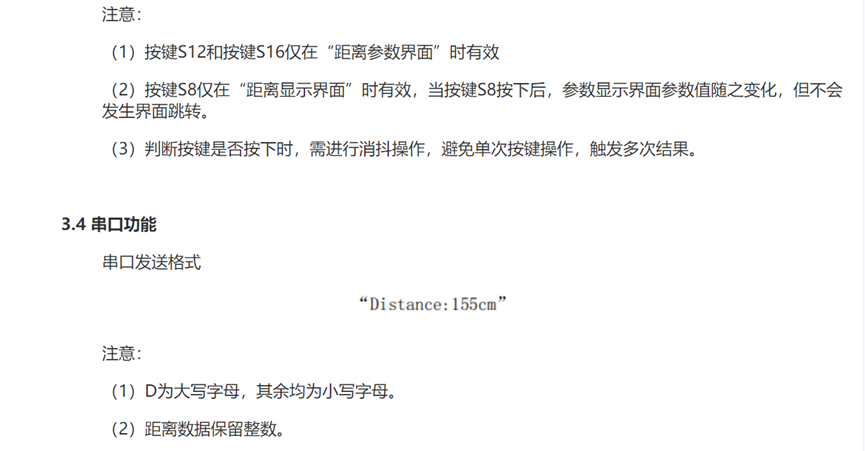
题目如下:
以下是代码:
main.c
#include "sys.h"
uint t;
bit MEA_DIST_FLAG = 0;
uint dist;
uchar urdat; //串口接收数据
bit led3_k = 0,led3 = 1;
//led3_k:如果dist > para,led_k = 1 led3:控制led3亮灭
uchar led_t;
void main(void)
{
SystemInit();
while(1)
{
KeyScans();
KeyDown();
if(MEA_DIST_FLAG)
{
MEA_DIST_FLAG = 0;
dist = MeaDist();
}
DisplaySMG();
Function();
}
}
void Function(void)
{
if(dist > para)
{
led3_k = 1;
OperateLed(3,led3);
}
else
{
led3_k = 0;
OperateLed(3,1);
}
}
void Timer0(void) interrupt 12
{
t++;
if(t == 10)
{
t = 0;
MEA_DIST_FLAG = 1;
}
if(led3_k)
{
led_t++;
if(led_t == 4)
{
led_t = 0;
led3 = ~led3;
}
}
}
void Uart(void) interrupt 4
{
if(RI)
{
RI = 0;
urdat = SBUF;
}
}
sys.c
#include "sys.h"
void Select_74hc138(uchar channel)
{
switch(channel)
{
case 0: P2=P2&0X1F; break;
case 4: P2=(P2&0X1F)|0X80; break;
case 5: P2=(P2&0X1F)|0XA0; break;
case 6: P2=(P2&0X1F)|0XC0; break;
case 7: P2=(P2&0X1F)|0XE0; break;
}
}
void SystemInit(void)
{
Select_74hc138(4);
P0 = 0XFF;
Select_74hc138(5);
P0 = 0X00;
Select_74hc138(7);
P0 = 0XFF;
Select_74hc138(0);
Timer0Init();
Timer5Init();
UartInit();
do{
dist = MeaDist();MeaDist();
}while(dist == 0);
}
void Delay(uint ms)
{
uint i;
for(ms; ms > 0; ms--)
for(i = 921; i > 0; i--);
}
void OperateLed(uchar who,status)
{
static uchar temp;
uchar zt;
switch(status)
{
case 0:
temp = temp|_crol_(0x01,who-1);
P0 = ~temp;
break;
case 1:
zt = (~temp)|_crol_(0x01,who-1);
if(temp != (~zt))
temp = ~zt;
P0 = zt;
break;
}
Select_74hc138(4);
Select_74hc138(0);
}
//定时器0测距
void Timer0Init(void)
{
AUXR &= 0x7f;
TMOD &= 0XF0;
TL0 = 0X00;
TH0 = 0x00;
TF0 = 0;
}
//定时器2定时
void Timer5Init(void) //50毫秒@12.000MHz
{
AUXR &= 0xFB; //定时器时钟12T模式
T2L = 0xB0; //设置定时初值
T2H = 0x3C; //设置定时初值
AUXR |= 0x10; //定时器2开始计时
IE2 |= 0X04; //开定时器2中断
EA = 1; //开启总中断
}
//定时器1串口发送
void UartInit(void) //9600bps@12.000MHz
{
PCON &= 0X7F;//
SCON = 0x50; //8位数据,可变波特率
AUXR &= 0xBF; //定时器1时钟为Fosc/12,即12T
AUXR &= 0xFE; //串口1选择定时器1为波特率发生器
TMOD &= 0x0F; //设定定时器1为16位自动重装方式
TMOD |= 0X20; // //8位自动重装载
TL1 = 0xFD; //设定定时初值
TH1 = 0xFD; //设定定时初值
ET1 = 0; //禁止定时器1中断
TR1 = 1; //启动定时器1
ES = 1;
EA = 1;
}
void SendByte(uchar dat)
{
SBUF = dat;
while(TI == 0);
TI = 0;
}
void SendString(uchar *buf)
{
while(*buf != '\0')
{
SendByte(*buf++);
}
}
sonic.c
#include "sys.h"
void Delay14us() //@14.000MHz
{
unsigned char i;
_nop_();
_nop_();
i = 39;
while (--i);
}
void SendSonic(void)
{
uchar i = 8;
while(i--)
{
TX = 1;
Delay14us();
TX = 0;
Delay14us();
}
}
uint MeaDist(void)
{
uint distance = 0;
uint times = 0;
SendSonic();
TR0 = 1; //启动定时器1
while((RX == 1)&&(TF0 == 0));
//等待超声波信号返回,返回后RX为低电平,或超出测量范围
TR0 = 0; //停止定时器1
if(RX == 0)
{
times = (TH0<<8)|TL0;
distance = times*0.0175;
TH0 = 0;
TL0 = 0;
}
if(TF0 == 1)
{
TF0 = 0;
distance = 999;
TH0 = 0;
TL0 = 0;
}
return distance;
}
key.c
#include "sys.h"
uchar key_val = 20;
uchar tem[64];
void KeyScans(void)
{
uchar hang;
if(key_val == 20)
{
for(hang = 0; hang < 4; hang++)
{
P3 = _cror_(0xf7,hang)&0xff;
if(l1 == 0)
{
Delay(10);
key_val = hang+4*1;
while(l1 == 0)
{
DisplaySMG();
Function();
dist = MeaDist();
}
}
if(l2 == 0)
{
Delay(10);
key_val = hang+4*2;
while(l2 == 0)
{
DisplaySMG();
Function();
dist = MeaDist();
}
}
if(l3 == 0)
{
Delay(10);
key_val = hang+4*3;
while(l3 == 0)
{
DisplaySMG();
Function();
dist = MeaDist();
}
}
if(l4 == 0)
{
Delay(10);
key_val = hang+4*4;
while(l4 == 0)
{
DisplaySMG();
Function();
dist = MeaDist();
}
}
}
}
}
void KeyDown(void)
{
if(key_val != 20)
{
switch(key_val)
{
case 4: interface = (interface +1)%2; break;
case 8: if(interface == 0) {para = dist;} break;
case 9:
sprintf((char *)tem,"\n\rDistance: %dcm \n\r",dist);
SendString(tem);
break;
case 12: if(interface == 1) {para += 10;} break;
case 16: if(interface == 1) {para -= 10; if(para == -10) { para = 0;}} break;
default: break;
}
}
key_val = 20;
}
smg.c
#include "sys.h"
uchar interface;//界面切换
uint para = 30;
code unsigned char Seg_Table[] =
{
0xc0, //0
0xf9, //1
0xa4, //2
0xb0, //3
0x99, //4
0x92, //5
0x82, //6
0xf8, //7
0x80, //8
0x90, //9
0xc1 //U
};
void DisplayBit(uchar pos,value)
{
P0 = 0x00;
Select_74hc138(6);
Select_74hc138(0);
P0 = Seg_Table[value];
Select_74hc138(7);
Select_74hc138(0);
P0 = _crol_(0x01,pos-1);
Select_74hc138(6);
Select_74hc138(0);
Delay(1);
}
void DisplaySMG(void)
{
switch(interface)
{
case 0:
DisplayBit(1,10);
DisplayBit(2,1);
if(dist > 99)
DisplayBit(6,dist/100);
if(dist > 9)
DisplayBit(7,dist/10%10);
DisplayBit(8,dist%10);
OperateLed(1,0);
OperateLed(2,1);
break;
case 1:
DisplayBit(1,10);
DisplayBit(2,2);
if(para > 99)
DisplayBit(6,para/100);
if(para > 9)
DisplayBit(7,para/10%10);
DisplayBit(8,para%10);
OperateLed(1,1);
OperateLed(2,0);
break;
}
}
sys.h
#ifndef _SYS_H
#define _SYS_H
#include <STC15F2K60S2.H>
#include "intrins.h"
#include "stdio.h"
sbit TX = P1^0;
sbit RX = P1^1;
sbit l1 = P4^4;
sbit l2 = P4^2;
sbit l3 = P3^5;
sbit l4 = P3^4;
#define uchar unsigned char
#define uint unsigned int
extern uint dist;
extern uchar interface;
extern uint para;
void Function(void);
void Select_74hc138(uchar channel);
void SystemInit(void);
void Delay(uint ms);
void OperateLed(uchar who,status);
void Timer0Init(void);
void Timer5Init(void);
void UartInit(void);
void SendString(uchar *buf);
//smg.c
void DisplayBit(uchar pos,value);
void DisplaySMG(void);
//sonic.c
uint MeaDist(void);
//key.c
void KeyScans(void);
void KeyDown(void);
#endif
















 479
479











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











