







PWM.h
#ifndef __PWM_H
#define __PWM_H
void PWM_Init();
void PWM_SetCompare1(uint16_t Compare);
#endif
PWM.c
#include "stm32f10x.h" // Device header
void PWM_Init()
{
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE); //开启定时器2
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);//通道2时钟使能函数
GPIO_InitTypeDef GPIO_InitStructure; //定义GPIO初始化结构体变量
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //设置GPIO为推挽输出模式
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0; //设置 P1 P2
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //速度设置为 50MHz
GPIO_Init(GPIOA, &GPIO_InitStructure); //按照以上参数进行 GPIO的初始化
TIM_InternalClockConfig(TIM2);//TIM的时基单元由内部时钟控制
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;
TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInitStructure.TIM_Period = 100 - 1; //ARR 自动重装器的值
TIM_TimeBaseInitStructure.TIM_Prescaler = 720 - 1; //PSC 预分频器的值 对72M(720000000)进行 7200分频 即10K的频率下 计10000个数 1s的时间
TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0;//重复计数器的值
TIM_TimeBaseInit(TIM2,&TIM_TimeBaseInitStructure);
TIM_OCInitTypeDef TIM_OCInitStructure;
TIM_OCStructInit(&TIM_OCInitStructure);
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;//输出极性选择
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;//输出状态使能
TIM_OCInitStructure.TIM_Pulse = 10;//CCR
TIM_OC1Init(TIM2,&TIM_OCInitStructure);
TIM_Cmd(TIM2,ENABLE);//启动定时器
}
void PWM_SetCompare1(uint16_t Compare)//不断调整CCR,实现呼吸灯效果
{
TIM_SetCompare1(TIM2, Compare);
}
main.c
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "LED.h"
#include "Key.h"
#include "OLED.H"
#include "PWM.H"
uint8_t i;
int main(void)
{
OLED_Init();
PWM_Init();
while (1)
{
for ( i = 0; i <= 100; i++)
{
PWM_SetCompare1(i);
Delay_ms(10);//延迟一下,不然会太快了
}
for ( i = 0; i <= 100; i++)
{
PWM_SetCompare1(100 - i);
Delay_ms(10);
}
}
}
为什么要选择设置为推挽输出?
因为 引脚的控制是由输出寄存器控制的,如果想让定时器来控制引脚的话,就需要用到复用开漏/推挽输出,会把输出控制权转移给片上外设----此处为,TIM2的CH1通道。
。。。。。。换句话说,只有把GPIO设置成复用推挽输出,引脚的控制权才能转移给片上外设,PWM波形才能通过引脚输出。

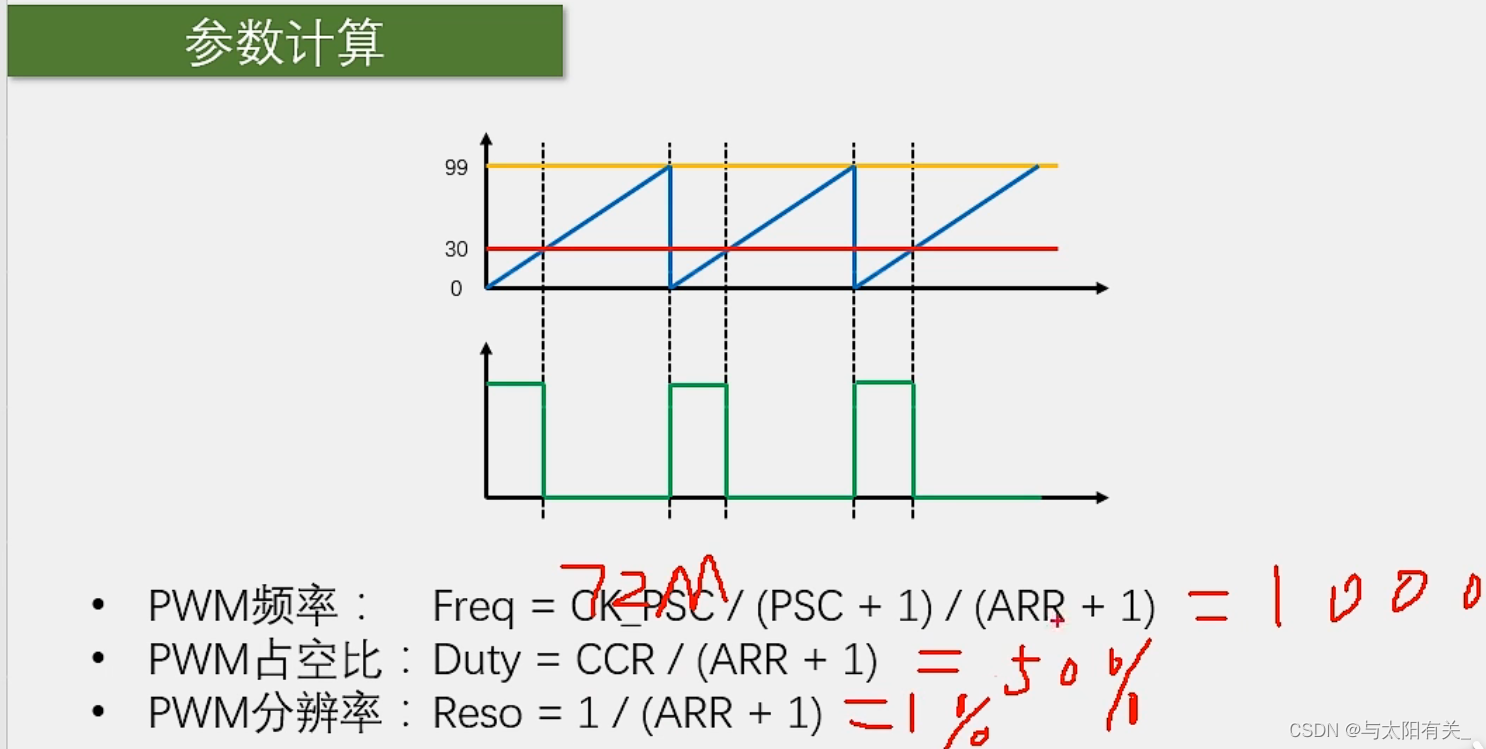
参数计算
如何设置一个 1000Hz占空比任意调节且分辨率为1%的PWM?
两个未知数,三个方程。。。。结果出 CCR=100,CCR=50,PSC=720

















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











