






 本教程介绍如何自制一款类似AxiDraw的绘图机器人。该机器人采用Arduino Uno控制器及GRBL固件,最大绘图面积可达24*30CM。教程详细说明了所需零件、3D打印设置及组装步骤。
本教程介绍如何自制一款类似AxiDraw的绘图机器人。该机器人采用Arduino Uno控制器及GRBL固件,最大绘图面积可达24*30CM。教程详细说明了所需零件、3D打印设置及组装步骤。
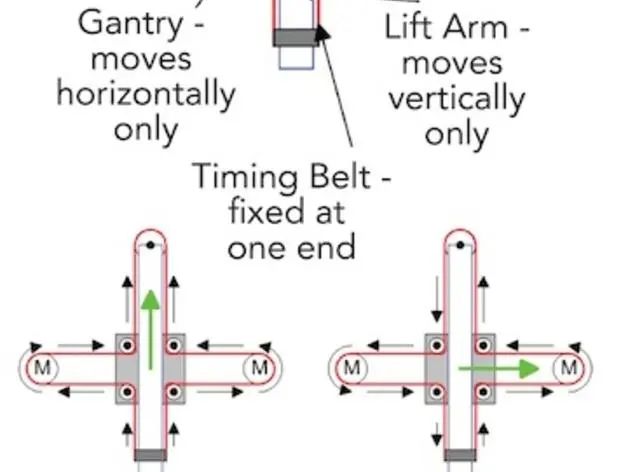
绘图机器人/笔式绘图仪/绘图机是著名机器 AxiDraw 的开放硬件版本,它是一款笔式绘图仪,能够在几乎任何平面上书写或绘图。它可以用钢笔、永久性记号笔、铅笔和其他书写工具书写,以应对各种应用。
其独特的设计具有延伸到机器之外的书写头,可以在比机器本身更大的物体上绘图。该机最大的优点是由于该机的核心XY延伸设计,可以放在书本上方。
这种绘图机器人/钢笔绘图仪/绘图机类似于市售的 AxiDraw。它由 Arduino Uno 控制器驱动,使用 CNC Shield 和 GRBL 固件
建造绘图机器人的成本在 75 美元之间,具体取决于您在哪里购买零件以及您是否已经拥有一些零件,例如 Arduino。
最大绘图面积24*30CM。
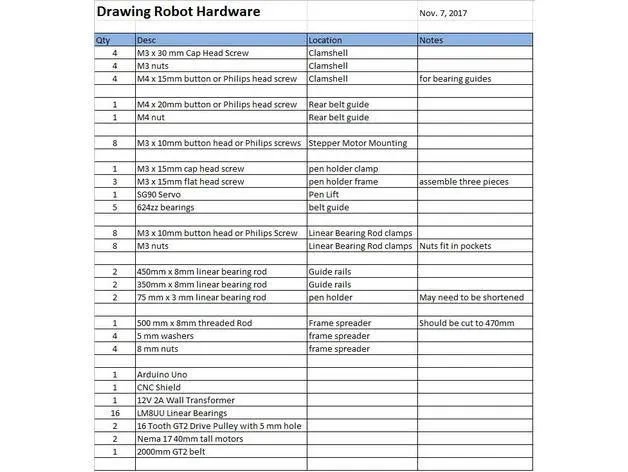
第 1 步:所需零件和材料
-
2 x Nema 17 步进电机
-
2 x 线性杆 M8 x 450mm 用于 X 轴
-
2 x 线性杆 M8 x 350mm 用于 Y 轴
-
用于 Z 轴的 2 x 线性杆 3mm(您可以从旧 CDROM 中获取)
-
1 x 螺纹杆 M8 x 480mm8 x LM8UU 轴承
-
1 x Servo Sg901 x Spring 5m(来自圆珠笔)
-
2 x GT2 滑轮,16 齿
-
5 x 轴承 624zz
-
1 x 2000mm GT2 腰带
-
1 x Arduino Uno
-
1 x CNC Shield
-
2 x A4988 带散热器的步进驱动器
-
6 x 跳线
-
1 x 12V 2A 电源
螺母零件:
-
7 x M3-0.5
-
5 x M4-0.7
-
4 x 5/16in-18
螺丝零件:
-
13 x Phillips M3-0.5 x 16mm
-
4 x Phillips M3-0.5 x 6mm
-
5 x Phillips M4-0.7x 35mm
-
1 x Hex M3-0.5 x 20mm
螺丝垫圈:
-
4 x 5/16in washer
-
4 x M3 washers
第 2 步:3D 打印

从 Thingiverse 下载文件
在 Cura 或任何其他切片器中打开 3D 模型。
在所有部件上使用 75% 的填充物(70-100% 的填充物也可以)
以 0.10 – 0.20 毫米层高打印所有部件
用 PLA 印刷
在 Penholder、Slider、X_Support_L 和 X_Support_R 上使用支撑
注:最长的部分大约需要 10 小时,最短的部分需要 30 分钟打印
PLA 适合这种设计。我在 BuildTak 上以 200C 打印。所有部件都不需要筏板或边缘。我建议只支持笔架和直立的 Z 轴端板。
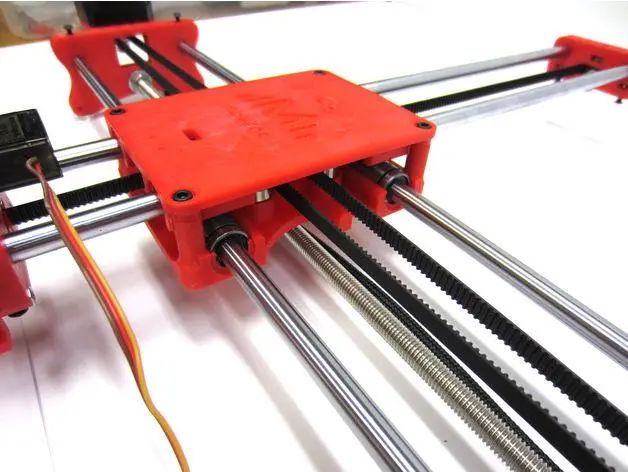
第 3 步:组装 X 轴
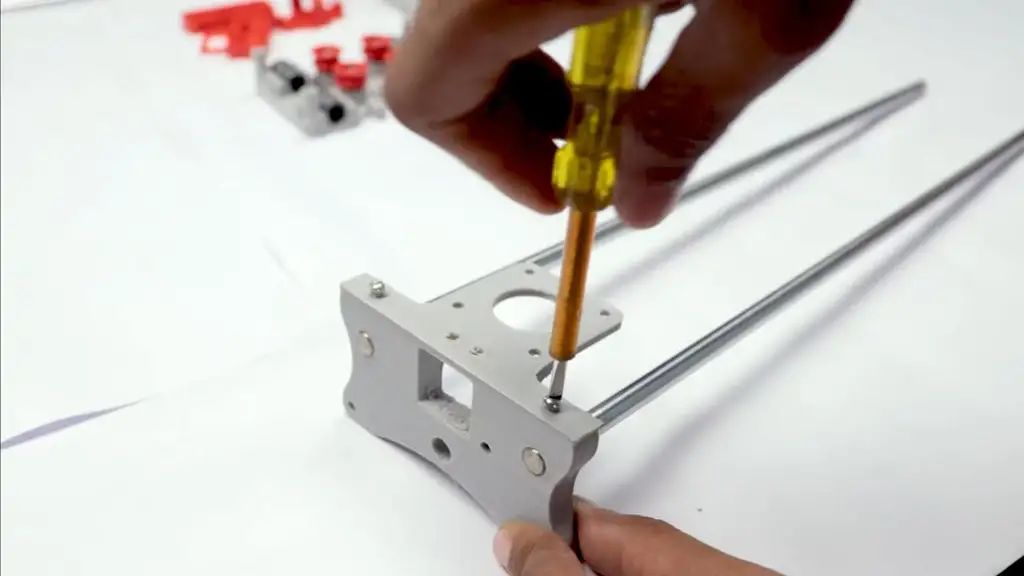
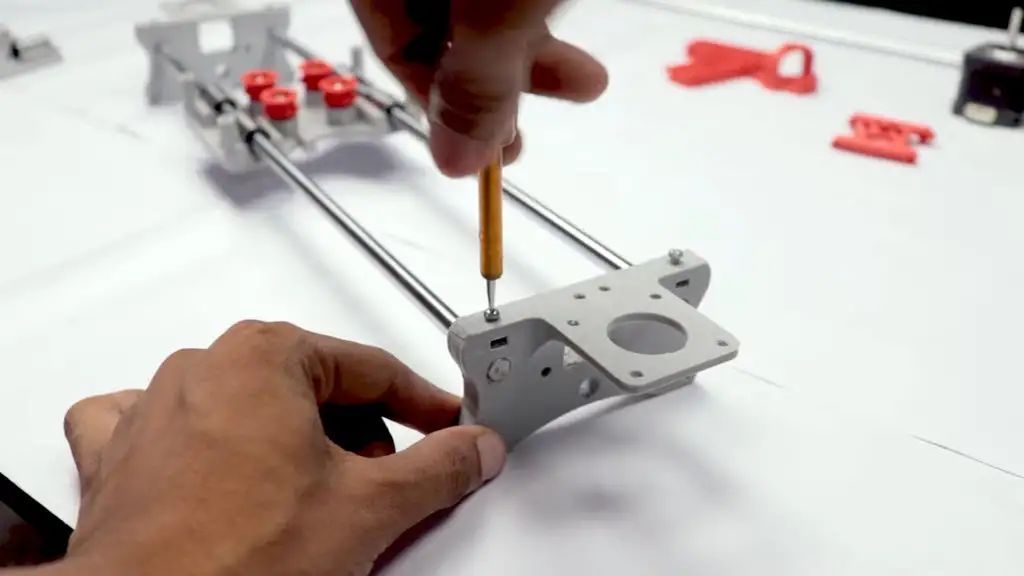
请记住,您需要 (2) 根 350 毫米和 (2) 根 450 毫米长的线性杆
取出(2) 根 450mm线性杆并将它们插入任一 x 支撑部件
-
使用时可能需要使用圆锉来平滑插入它们的孔
-
此外,您可以使用橡胶槌来帮助插入杆
现在取出螺纹杆并将其插入下面的孔中。在 x 支撑部分的两侧送入 5/16 英寸垫圈和 5/16 英寸螺母
第 4 步:组装 X 轴轴承

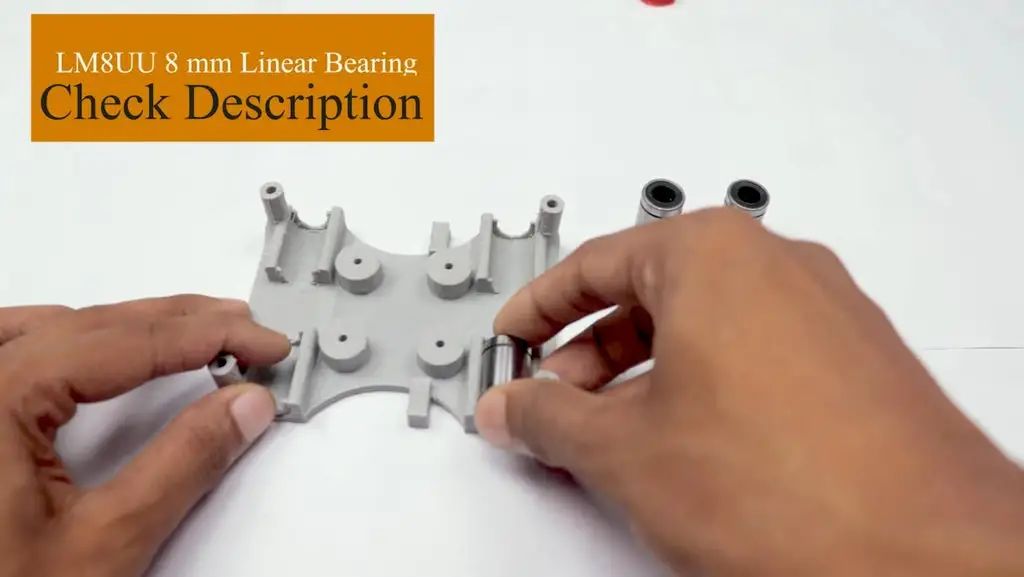
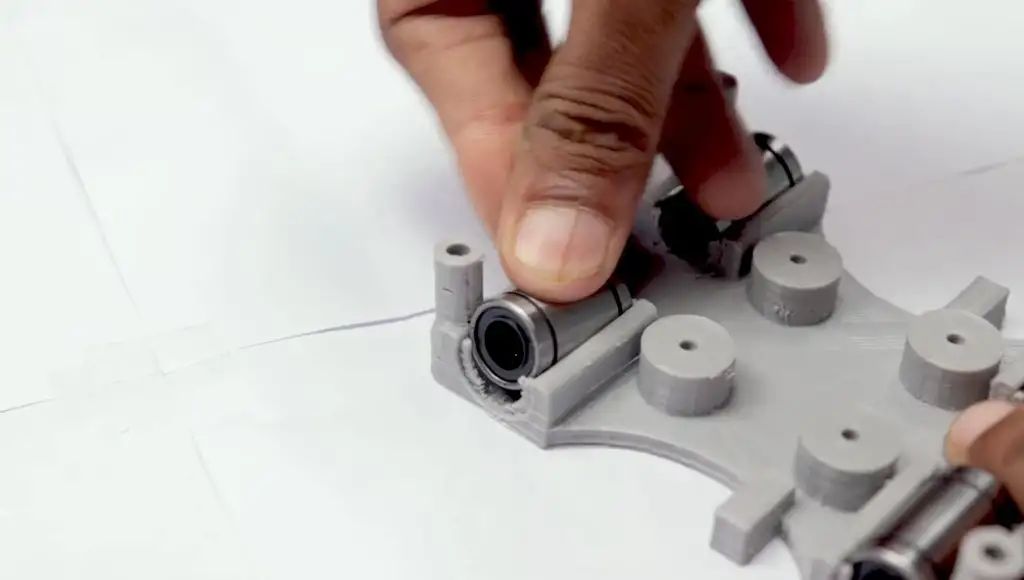
现在您想将 LM8UU 轴承推入顶部和底部翻盖上的位置(顶部和底部翻盖各有 (4) 个轴承)
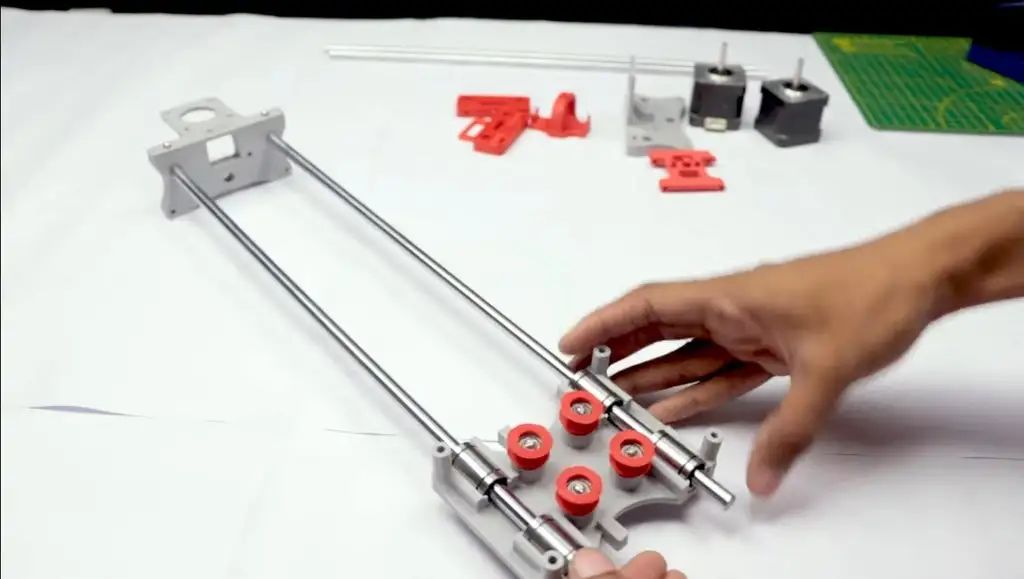
取 (4) 个 624zz 轴承并将它们推过 3D 打印的惰轮。将第 5 个轴承留到以后组装 Y 轴时使用
组装 X 轴(托架)
-
安装 (4) 个 M3-0.5 x 20mm 螺钉、(4) 个 M3 螺母、(4) 个 M3 垫圈和 (4) 个 624zz 轴承,并安装惰轮
-
取一个螺钉并将垫圈穿过它,垫圈将靠在轴承上。螺母将位于托架底部,用于将轴承固定到位
组装 X 轴(X 支撑)
-
将翻盖滑过 450 毫米(X 轴)线性杆
-
再次使用橡胶锤将最后一个 X 支撑连接到线性杆上
-
确保杆在两侧均等地伸出
-
将螺纹杆的另一端穿过 X 支撑上的孔
-
装上最后一组螺母和垫圈以将 X 支撑固定到位
-
现在 X 轴已完成,您可以为每个 X 支撑使用 (2) 个 Phillips M3-0.5 x 16mm 螺钉,以帮助防止线性杆滑动
第 5 步:组装 Y 轴
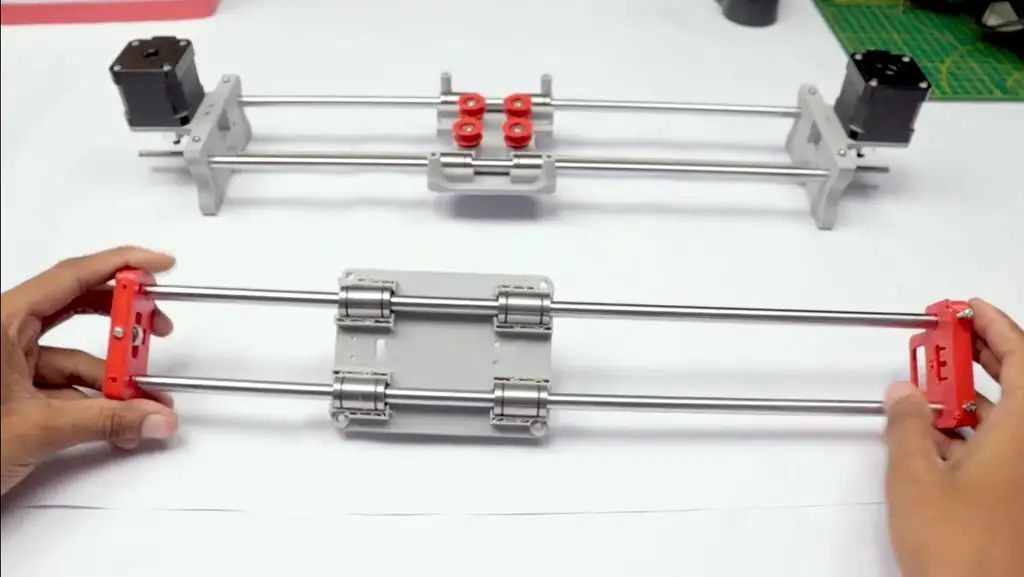
Y-背面
-
取 (2) 根 350mm 线性杆并使用橡胶锤将其插入 Y 形背板
-
获得 (1) M4-0.5 x 35 螺丝、(1) M4 螺母和第 5 个 624zz 轴承
-
获取 (2) 个 M3-0.5 x 16 螺钉以固定线性杆
-
将螺钉插入 Y 形背板时将轴承滑入
Y-正面
-
通过 LM8UU 轴承滑动线性杆/Y 型后部部件并使用橡胶锤连接 Y 型前部部件
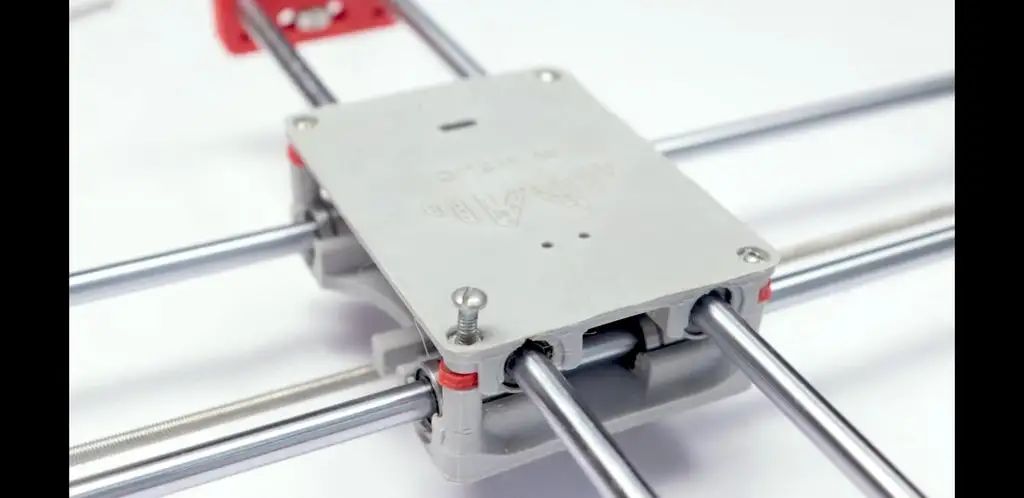
第 6 步:组装 XY 轴(皮带)

-
使用尖嘴钳帮助引导 GT2 腰带更轻松地穿过翻盖
-
取出皮带的两端,将它们滑过底座滑块上的“齿”
-
腰带要紧,不能松
-
注意一旦GT2带上,翻盖不容易移动是正常的
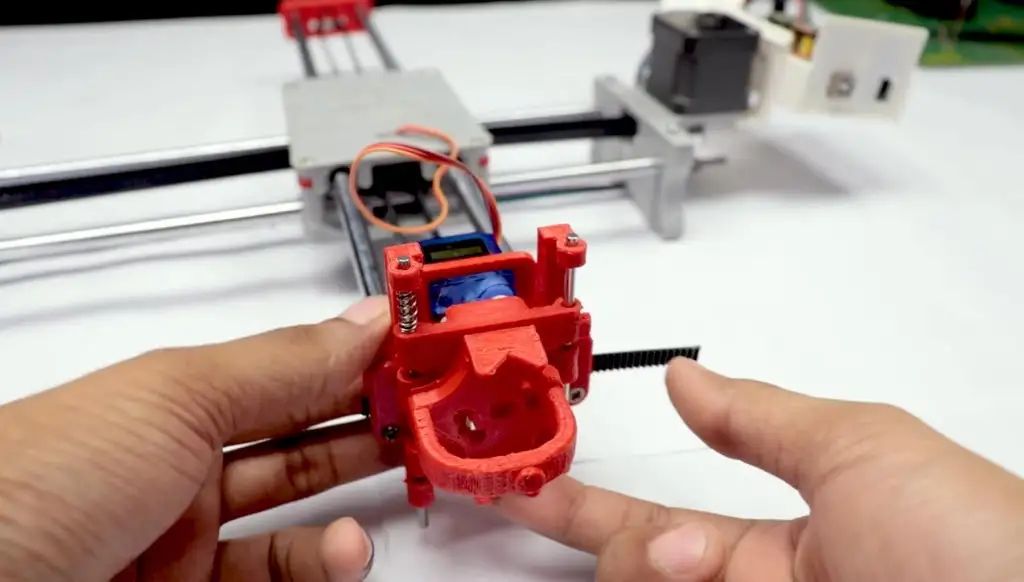
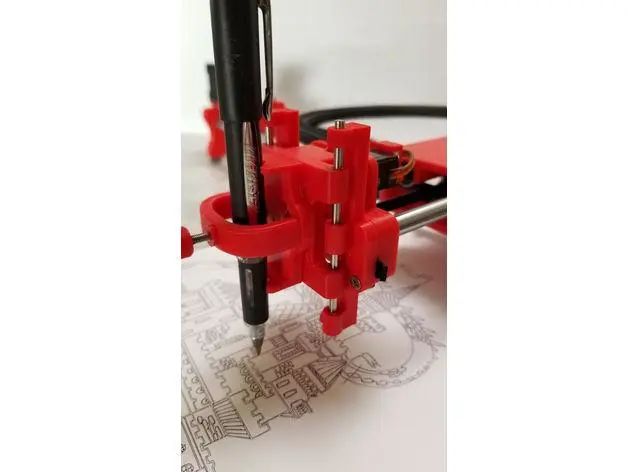
第 7 步:组装 Z 轴

-
获取 (2) 根 3mm 线性杆和以下 3D 打印部件(滑块、笔架、底座滑块、3MM 公制拇指螺丝)
-
获取 (1) 个六角 M3-0.5 x 20mm 螺钉和公制拇指螺钉并将它们推到一起。使用强力胶将它们粘在一起。
-
获取 (3) 个 M3-0.5 x 16mm 螺钉,您将使用这些螺钉将底座滑轨固定到 Y 前部。您可能需要使用 (3) 个 M3-0.5 螺母将其固定到位
-
将滑块和笔架推到一起,做成一件
-
现在拿起那个新零件和 (2) 3mm 线性杆,并将杆滑过孔。在两个部件之间放置一个小弹簧,以便有一点压力来抬起滑块。您可能需要将弹簧剪短一点,直到滑块上有足够的压力。
第 8 步:电路部分


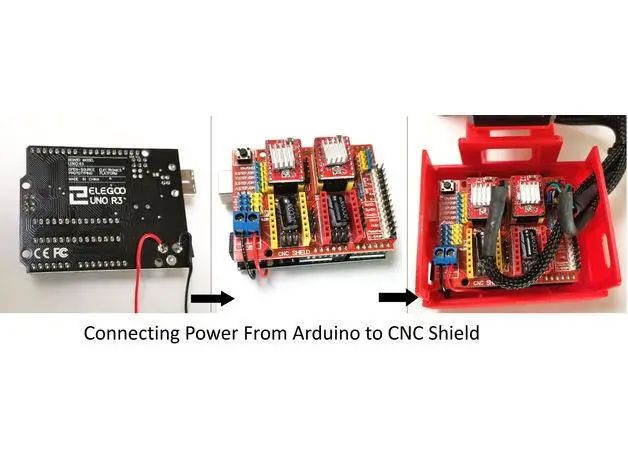
可以使用 Arduino uno CNC Shield
准备好您的所有电路
1) 4pcs A4988 步进电机驱动器
2)扩展板A4988驱动
3) Arduino UNO 首先取下水槽并粘在 A4988 电机驱动器上。
4pcs A4988 步进电机驱动器连接在扩展板上 A4988 驱动器模块,然后将 arduino 与扩展板连接并连接所有接线 屏蔽还具有内置的微步进控制 - 这意味着而不是像大型 CNC 那样使用全步或半步可以,我们可以使电机移动 1/16 或 1/32 步长,以使激光以尽可能高的精度移动。但是,电机会消耗更多电力:它们会更快变热。
要使用微步进模式,请将一些模式引脚短接在一起。不同的组合给出不同的分辨率。查看图表以了解可能的不同配置。当屏蔽被编程时,将 A4988 驱动程序添加到它并连接其余的电子设备。
要找到步进电机的线圈,请使用万用表。如果两根导线之间存在电阻,则您有一个线圈。在原理图中,线圈由两条相同颜色的电线表示。
第 9 步:软件部分
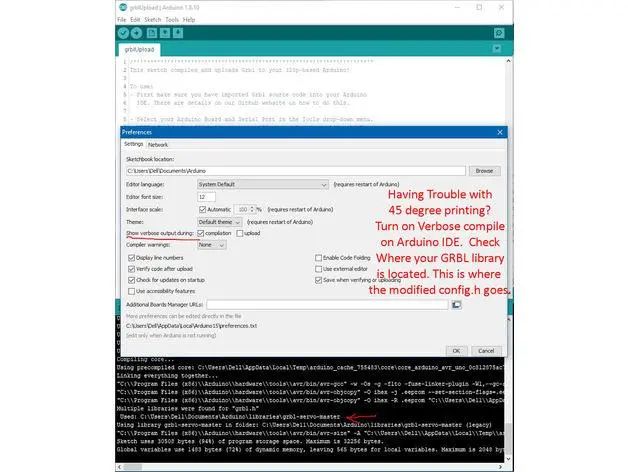

Inkscape 图形设计软件(绘制或导入图形)
Inkscape MI GRBL 扩展(将图形转换为 G 代码)通用 G 代码发送器(将 G 代码发送到引起绘图运动的机器人)GRBL 是 Arduino 固件(编程到 Arduino Uno)
你做了这个项目吗?与我们分享吧!
以上内容翻译自网络,原作者SmartTronix,如涉及侵权可联系删除。


















 2643
2643

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











