






1.启动ros。
roscore
2.安装uvc-cam
sudo apt-get install ros-melodic-uvc-cameraros- 后跟Ubuntu版本,18.04对应melodic(可用一下命令查看Ubuntu版本)
lsb_release -a
3.运行uvc-cam相机节点,并使用image_view调用摄像头
rosrun uvc_camera uvc_camera_node
rosrun image_view image_view image:=/image_raw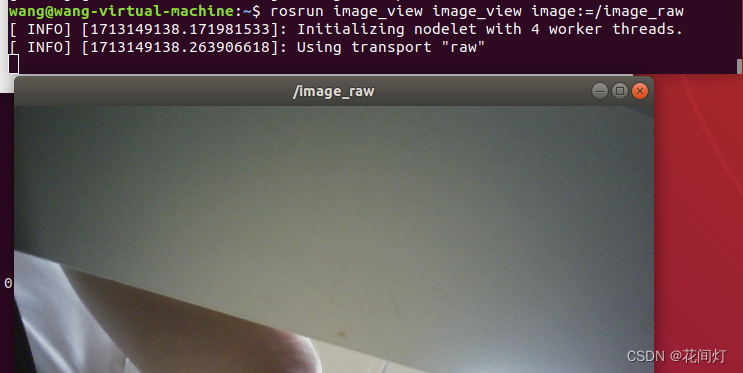
4.使用rviz显示摄像头。
rviz添加image
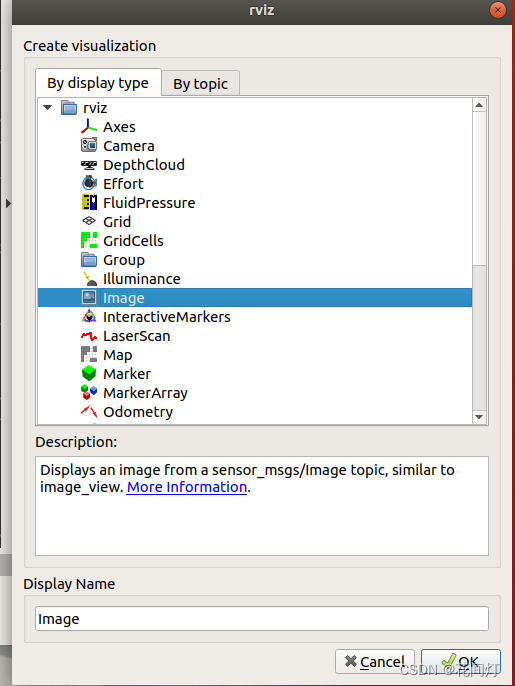
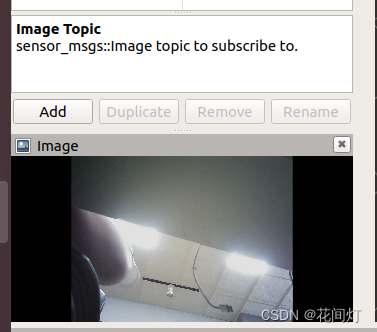
订阅话题 /image raw
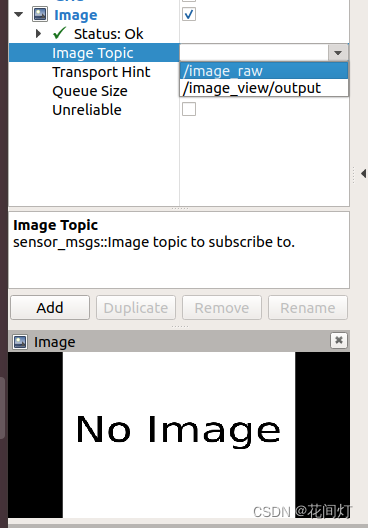
rviz中显示成功
















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









