






代码主要来自https://github.com/verlab/accelerated_features/issues/9,该博客主要介绍环境配置过程
1 配置onnxruntime
从https://github.com/Microsoft/onnxruntime/releases/tag/v1.10.0中下载已经编译好的onnxruntime-linux-x64-gpu-1.10.0
2 配置opencv
2.1 从https://opencv.org/blog/opencv-4-5-2/中下载源码
2.2 解压opencv源码包
unzip opencv-4.5.2
2.3 在解压的目录下,创建build文件夹,并进入
mkdir build
cd build
2.4 在build文件夹的内部执行如下命令
cmake -D CMAKE_BUILD_TYPE=Release -D CMAKE_INSTALL_PREFIX=/usr/local ..
2.5 执行make命令,进行编译
sudo make
3 下载源码和权重文件
https://github.com/verlab/accelerated_features/files/15329104/xfeat.zip#include <chrono>
#include <iostream>
#include "omp.h"
#include <opencv2/opencv.hpp>
#include <onnxruntime_cxx_api.h>
// for onnx model path
const ORTCHAR_T* stringToOrtchar_t(std::string const& s)
{
#ifdef _WIN32
const char* CStr = s.c_str();
size_t len = strlen(CStr) + 1;
size_t converted = 0;
wchar_t* WStr;
WStr = (wchar_t*)malloc(len * sizeof(wchar_t));
mbstowcs_s(&converted, WStr, len, CStr, _TRUNCATE);
return WStr;
#else
return s.c_str();
#endif // _WIN32
}
bool initOrtSession(Ort::Env& env, Ort::Session& session, std::string& modelPath, const int& gpuId = 0)
{
const ORTCHAR_T* ortModelPath = stringToOrtchar_t(modelPath);
bool sessionIsAvailable = false;
/*
if (sessionIsAvailable == false)
{
try
{
Ort::SessionOptions session_options;
session_options.SetGraphOptimizationLevel(GraphOptimizationLevel::ORT_ENABLE_ALL);
// try Tensorrt
OrtTensorRTProviderOptions trtOptions{};
trtOptions.device_id = gpuId;
trtOptions.trt_fp16_enable = 1;
trtOptions.trt_engine_cache_enable = 1;
trtOptions.trt_engine_cache_path = "./trt_engine_cache";
trtOptions.trt_max_workspace_size = (size_t)4 * 1024 * 1024 * 1024;
session_options.AppendExecutionProvider_TensorRT(trtOptions);
session = Ort::Session(env, ortModelPath, session_options);
sessionIsAvailable = true;
std::cout << "Using accelerator: Tensorrt" << std::endl;
}
catch (Ort::Exception e)
{
std::cout << "Exception code: " << e.GetOrtErrorCode() << ", exception: " << e.what() << std::endl;
std::cout << "Failed to init Tensorrt accelerator, Trying another accelerator..." << std::endl;
sessionIsAvailable = false;
}
catch (...)
{
std::cout << "Failed to init Tensorrt accelerator, Trying another accelerator..." << std::endl;
sessionIsAvailable = false;
}
}
*/
if (sessionIsAvailable == false)
{
try
{
Ort::SessionOptions session_options;
session_options.SetGraphOptimizationLevel(GraphOptimizationLevel::ORT_ENABLE_ALL);
OrtCUDAProviderOptions cuda0ptions;
cuda0ptions.device_id = gpuId;
cuda0ptions.gpu_mem_limit = 4 << 30;
session_options.AppendExecutionProvider_CUDA(cuda0ptions);
session = Ort::Session(env, ortModelPath, session_options);
sessionIsAvailable = true;
std::cout << "Using accelerator: CUDA" << std::endl;
}
catch (Ort::Exception e)
{
std::cout << "Exception code: " << e.GetOrtErrorCode() << ", exception: " << e.what() << std::endl;
std::cout << "Failed to init CUDA accelerator, Trying another accelerator..." << std::endl;
sessionIsAvailable = false;
}
catch (...)
{
std::cout << "Failed to init CUDA accelerator, Trying another accelerator..." << std::endl;
sessionIsAvailable = false;
}
}
if (sessionIsAvailable == false)
{
try
{
Ort::SessionOptions session_options;
session_options.SetGraphOptimizationLevel(GraphOptimizationLevel::ORT_ENABLE_ALL);
session = Ort::Session(env, ortModelPath, session_options);
sessionIsAvailable = true;
std::cout << "Using accelerator: CPU" << std::endl;
}
catch (Ort::Exception e)
{
std::cout << "Exception code: " << e.GetOrtErrorCode() << ", exception: " << e.what() << std::endl;
std::cout << "Failed to init CPU accelerator, Trying another accelerator..." << std::endl;
sessionIsAvailable = false;
}
catch (...)
{
std::cout << "Failed to init CPU accelerator." << std::endl;
sessionIsAvailable = false;
}
}
if (sessionIsAvailable == true)
{
Ort::AllocatorWithDefaultOptions allocator;
// Get input layers count
size_t num_input_nodes = session.GetInputCount();
// Get input layer type, shape, name
for (int i = 0; i < num_input_nodes; i++)
{
// Name
std::string input_name = std::string(session.GetInputName(i, allocator));
std::cout << "Input " << i << ": " << input_name << ", shape: (";
// Type
Ort::TypeInfo type_info = session.GetInputTypeInfo(i);
auto tensor_info = type_info.GetTensorTypeAndShapeInfo();
ONNXTensorElementDataType type = tensor_info.GetElementType();
// Shape
std::vector<int64_t> input_node_dims = tensor_info.GetShape();
for (int j = 0; j < input_node_dims.size(); j++) {
std::cout << input_node_dims[j];
if (j == input_node_dims.size() - 1)
{
std::cout << ")" << std::endl;
}
else
{
std::cout << ", ";
}
}
}
// Get output layers count
size_t num_output_nodes = session.GetOutputCount();
// Get output layer type, shape, name
for (int i = 0; i < num_output_nodes; i++) {
// Name
std::string output_name = std::string(session.GetOutputName(i, allocator));
std::cout << "Output " << i << ": " << output_name << ", shape: (";
// type
Ort::TypeInfo type_info = session.GetOutputTypeInfo(i);
auto tensor_info = type_info.GetTensorTypeAndShapeInfo();
ONNXTensorElementDataType type = tensor_info.GetElementType();
// shape
std::vector<int64_t> output_node_dims = tensor_info.GetShape();
for (int j = 0; j < output_node_dims.size(); j++) {
std::cout << output_node_dims[j];
if (j == output_node_dims.size() - 1)
{
std::cout << ")" << std::endl;
}
else
{
std::cout << ", ";
}
}
}
}
else
{
std::cout << modelPath << " is invalid model." << std::endl;
}
return sessionIsAvailable;
}
class XFeat
{
public:
XFeat(std::string &xfeatModelPath, std::string& matchingModelPath);
int detectAndCompute(const cv::Mat &image, cv::Mat &mkpts, cv::Mat& feats, cv::Mat& sc);
int matchStar(const cv::Mat& mkpts0, const cv::Mat& feats0, const cv::Mat& sc0, const cv::Mat& mkpts1, const cv::Mat& feats1, cv::Mat& matches, cv::Mat& batch_indexes);
~XFeat();
// gpu id
int gpuId_ = 0;
// onnxruntime
Ort::Env env_{ nullptr };
Ort::Session xfeatSession_{ nullptr };
Ort::Session matchingSession_{ nullptr };
Ort::AllocatorWithDefaultOptions allocator;
//
std::vector<const char*> xfeatInputNames = { "images" };
std::vector<const char*> xfeatOutputNames = { "mkpts", "feats", "sc" };
std::vector<const char*> matchingInputNames = { "mkpts0", "feats0", "sc0", "mkpts1", "feats1"};
std::vector<const char*> matchingOutputNames = { "matches", "batch_indexes" };
bool initFinishedFlag_ = false;
};
XFeat::XFeat(std::string& xfeatModelPath, std::string& matchingModelPath)
{
const ORTCHAR_T* ortXfeatModelPath = stringToOrtchar_t(xfeatModelPath);
const ORTCHAR_T* ortMatchingModelPath = stringToOrtchar_t(matchingModelPath);
env_ = Ort::Env{ OrtLoggingLevel::ORT_LOGGING_LEVEL_FATAL, "xfeat_demo" }; // ORT_LOGGING_LEVEL_VERBOSE, ORT_LOGGING_LEVEL_FATAL
std::vector<std::string> availableProviders = Ort::GetAvailableProviders();
std::cout << "All available accelerators:" << std::endl;
for (int i = 0; i < availableProviders.size(); i++)
{
std::cout << " " << i + 1 << ". " << availableProviders[i] << std::endl;
}
// init sessions
initOrtSession(env_, xfeatSession_, xfeatModelPath, gpuId_);
initOrtSession(env_, matchingSession_, matchingModelPath, gpuId_);
}
XFeat::~XFeat()
{
env_.release();
xfeatSession_.release();
matchingSession_.release();
}
int XFeat::detectAndCompute(const cv::Mat& image, cv::Mat& mkpts, cv::Mat& feats, cv::Mat& sc)
{
// Pre process
cv::Mat preProcessedImage = cv::Mat::zeros(image.rows, image.cols, CV_32FC3);
int stride = preProcessedImage.rows * preProcessedImage.cols;
#pragma omp parallel for
for (int i = 0; i < stride; i++) // HWC -> CHW, BGR -> RGB
{
*((float*)preProcessedImage.data + i) = (float)*(image.data + i * 3 + 2);
*((float*)preProcessedImage.data + i + stride) = (float)*(image.data + i * 3 + 1);
*((float*)preProcessedImage.data + i + stride * 2) = (float)*(image.data + i * 3);
}
// Create input tensor
int64_t input_size = preProcessedImage.rows * preProcessedImage.cols * 3;
std::vector<int64_t> input_node_dims = { 1, 3, preProcessedImage.rows , preProcessedImage.cols };
auto memory_info = Ort::MemoryInfo::CreateCpu(OrtArenaAllocator, OrtMemTypeDefault);
Ort::Value input_tensor = Ort::Value::CreateTensor<float>(memory_info, (float*)(preProcessedImage.data), input_size, input_node_dims.data(), input_node_dims.size());
assert(input_tensor.IsTensor());
// Run sessionn
auto output_tensors =
xfeatSession_.Run(Ort::RunOptions{ nullptr }, xfeatInputNames.data(),
&input_tensor, xfeatInputNames.size(), xfeatOutputNames.data(), xfeatOutputNames.size());
assert(output_tensors.size() == xfeatOutputNames.size() && output_tensors.front().IsTensor());
// Get outputs
auto mkptsShape = output_tensors[0].GetTensorTypeAndShapeInfo().GetShape();
int dim1 = static_cast<int>(mkptsShape[0]); // 1
int dim2 = static_cast<int>(mkptsShape[1]); // 4800
int dim3 = static_cast<int>(mkptsShape[2]); // 2
float* mkptsDataPtr = output_tensors[0].GetTensorMutableData<float>();
// To cv::Mat
mkpts = cv::Mat(dim1, dim2, CV_32FC(dim3), mkptsDataPtr).clone();
auto featsShape = output_tensors[1].GetTensorTypeAndShapeInfo().GetShape();
dim1 = static_cast<int>(featsShape[0]); // 1
dim2 = static_cast<int>(featsShape[1]); // 4800
dim3 = static_cast<int>(featsShape[2]); // 64
float* featsDataPtr = output_tensors[1].GetTensorMutableData<float>();
feats = cv::Mat(dim1, dim2, CV_32FC(dim3), featsDataPtr).clone();
auto scShape = output_tensors[2].GetTensorTypeAndShapeInfo().GetShape();
dim1 = static_cast<int>(scShape[0]); // 1
dim2 = static_cast<int>(scShape[1]); // 4800
float* scDataPtr = output_tensors[2].GetTensorMutableData<float>();
sc = cv::Mat(dim1, dim2, CV_32F, scDataPtr).clone();
return 0;
}
int XFeat::matchStar(const cv::Mat& mkpts0, const cv::Mat& feats0, const cv::Mat& sc0, const cv::Mat& mkpts1, const cv::Mat& feats1, cv::Mat& matches, cv::Mat& batch_indexes)
{
auto memory_info = Ort::MemoryInfo::CreateCpu(OrtArenaAllocator, OrtMemTypeDefault);
int64_t mkpts0_size = mkpts0.rows * mkpts0.cols * mkpts0.channels();
std::vector<int64_t> mkpts0_dims = { mkpts0.rows, mkpts0.cols, mkpts0.channels()}; // 1x4800x2
Ort::Value mkpts0_tensor = Ort::Value::CreateTensor<float>(memory_info, (float*)(mkpts0.data), mkpts0_size, mkpts0_dims.data(), mkpts0_dims.size());
int64_t feats0_size = feats0.rows * feats0.cols * feats0.channels();
std::vector<int64_t> feats0_dims = { feats0.rows, feats0.cols, feats0.channels() }; // 1x4800x64
Ort::Value feats0_tensor = Ort::Value::CreateTensor<float>(memory_info, (float*)(feats0.data), feats0_size, feats0_dims.data(), feats0_dims.size());
int64_t sc0_size = sc0.rows * sc0.cols;
std::vector<int64_t> sc0_dims = { sc0.rows, sc0.cols }; // 1x4800
Ort::Value sc0_tensor = Ort::Value::CreateTensor<float>(memory_info, (float*)(sc0.data), sc0_size, sc0_dims.data(), sc0_dims.size());
int64_t mkpts1_size = mkpts1.rows * mkpts1.cols * mkpts1.channels();
std::vector<int64_t> mkpts1_dims = { mkpts1.rows, mkpts1.cols, mkpts1.channels() }; // 1x4800x2
Ort::Value mkpts1_tensor = Ort::Value::CreateTensor<float>(memory_info, (float*)(mkpts1.data), mkpts1_size, mkpts1_dims.data(), mkpts1_dims.size());
int64_t feats1_size = feats1.rows * feats1.cols * feats1.channels();
std::vector<int64_t> feats1_dims = { feats1.rows, feats1.cols, feats1.channels() }; // 1x4800x64
Ort::Value feats1_tensor = Ort::Value::CreateTensor<float>(memory_info, (float*)(feats1.data), feats1_size, feats1_dims.data(), feats1_dims.size());
// Create input tensors
std::vector<Ort::Value> input_tensors;
input_tensors.push_back(std::move(mkpts0_tensor));
input_tensors.push_back(std::move(feats0_tensor));
input_tensors.push_back(std::move(sc0_tensor));
input_tensors.push_back(std::move(mkpts1_tensor));
input_tensors.push_back(std::move(feats1_tensor));
// Run session
auto output_tensors =
matchingSession_.Run(Ort::RunOptions{ nullptr }, matchingInputNames.data(),
input_tensors.data(), matchingInputNames.size(), matchingOutputNames.data(), matchingOutputNames.size());
assert(output_tensors.size() == xfeatOutputNames.size() && output_tensors.front().IsTensor());
// Get outputs
auto matchesShape = output_tensors[0].GetTensorTypeAndShapeInfo().GetShape();
int dim1 = static_cast<int>(matchesShape[0]); // num
int dim2 = static_cast<int>(matchesShape[1]); // 4
// To cv::Mat
float* matchesDataPtr = output_tensors[0].GetTensorMutableData<float>();
matches = cv::Mat(dim1, dim2, CV_32F, matchesDataPtr).clone();
auto batch_indexesShape = output_tensors[1].GetTensorTypeAndShapeInfo().GetShape();
dim1 = static_cast<int>(batch_indexesShape[0]); // num
float* batch_indexesDataPtr = output_tensors[0].GetTensorMutableData<float>();
batch_indexes = cv::Mat(dim1, 1, CV_32F, batch_indexesDataPtr).clone();
return 0;
}
cv::Mat warpCornersAndDrawMatches(const std::vector<cv::Point2f>& refPoints, const std::vector<cv::Point2f>& dstPoints,
const cv::Mat& img1, const cv::Mat& img2)
{
// Step 1: Calculate the Homography matrix and mask
cv::Mat mask;
cv::Mat H = cv::findHomography(refPoints, dstPoints, cv::USAC_MAGSAC, 3.5, mask, 1000, 0.999);
mask = mask.reshape(1, mask.total()); // Flatten the mask
// Step 2: Get corners of the first image (img1)
std::vector<cv::Point2f> cornersImg1 = { cv::Point2f(0, 0), cv::Point2f(img1.cols - 1, 0),
cv::Point2f(img1.cols - 1, img1.rows - 1), cv::Point2f(0, img1.rows - 1) };
std::vector<cv::Point2f> warpedCorners(4);
// Step 3: Warp corners to the second image (img2) space
cv::perspectiveTransform(cornersImg1, warpedCorners, H);
// Step 4: Draw the warped corners in image2
cv::Mat img2WithCorners = img2.clone();
for (size_t i = 0; i < warpedCorners.size(); i++) {
cv::line(img2WithCorners, warpedCorners[i], warpedCorners[(i + 1) % 4], cv::Scalar(0, 255, 0), 4);
}
// Step 5: Prepare keypoints and matches for drawMatches function
std::vector<cv::KeyPoint> keypoints1, keypoints2;
std::vector<cv::DMatch> matches;
for (size_t i = 0; i < refPoints.size(); i++) {
if (mask.at<uchar>(i)) { // Only consider inliers
keypoints1.emplace_back(refPoints[i], 5);
keypoints2.emplace_back(dstPoints[i], 5);
}
}
for (size_t i = 0; i < keypoints1.size(); i++) {
matches.emplace_back(i, i, 0);
}
// Draw inlier matches
cv::Mat imgMatches;
cv::drawMatches(img1, keypoints1, img2WithCorners, keypoints2, matches, imgMatches, cv::Scalar(0, 255, 0), cv::Scalar::all(-1), std::vector<char>(), cv::DrawMatchesFlags::NOT_DRAW_SINGLE_POINTS);
return imgMatches;
}
int main()
{
std::string xfeatModelPath = "./xfeat_dualscale.onnx";
std::string matchingModelPath = "./matching.onnx";
cv::Mat image0 = cv::imread("./ref.png", cv::IMREAD_COLOR);
cv::Mat image1 = cv::imread("./tgt.png", cv::IMREAD_COLOR);
cv::Mat mkpts0, feats0, sc0;
cv::Mat mkpts1, feats1, sc1;
cv::Mat matches, batch_indexes;
// Init xfeat object
XFeat xfeat(xfeatModelPath, matchingModelPath);
// Extract feats
xfeat.detectAndCompute(image0, mkpts0, feats0, sc0);
xfeat.detectAndCompute(image1, mkpts1, feats1, sc1);
// Matching and refine
xfeat.matchStar(mkpts0, feats0, sc0, mkpts1, feats1, matches, batch_indexes);
// Print results
std::cout << "matches: " << matches.rows << "x" << matches.cols << "x" << matches.channels() << std::endl;
std::cout << "batch_indexes: " << batch_indexes.rows << "x" << batch_indexes.cols << "x" << batch_indexes.channels() << std::endl;
// Get points
std::vector<cv::Point2f> points0, points1;
for (int i = 0; i < matches.rows; i++)
{
points0.push_back(cv::Point2f(*((float*)matches.data + i * 4), *((float*)matches.data + i * 4 + 1)));
points1.push_back(cv::Point2f(*((float*)matches.data + i * 4 + 2), *((float*)matches.data + i * 4 + 3)));
}
// Visualization
cv::Mat drawImage;
drawImage = warpCornersAndDrawMatches(points0, points1, image0, image1);
cv::imshow("demo", drawImage);
cv::waitKey();
return 0;
}4 编写CMakeLists.txt文件
cmake_minimum_required(VERSION 3.10)
project(xfeat)
set(CMAKE_CXX_STANDARD 11)
set(CMAKE_BUILD_TYPE Debug)
set(CMAKE_BUILD_TYPE RelWithDebInfo)
set(OpenCV_DIR /***/*****/****/opencv-4.5.2/build)
find_package(OpenCV REQUIRED)
include_directories(${OpenCV_INCLUDE_DIRS})
set(OnnxDIR /***/*****/****/onnxruntime-linux-x64-gpu-1.10.0)
include_directories(${OnnxDIR}/include)
link_directories(${OnnxDIR}/lib)
add_executable(xfeat demo.cpp)
target_link_libraries(xfeat ${OnnxDIR}/lib/libonnxruntime.so.1.10.0)
target_link_libraries(xfeat ${OpenCV_LIBS})5 创建build目录,并在该目录下进行编译
mkdir build
cd build
cmake ..
make6 完整文件结构如下图所示
7 运行可执行文件,得到结果
./xfeat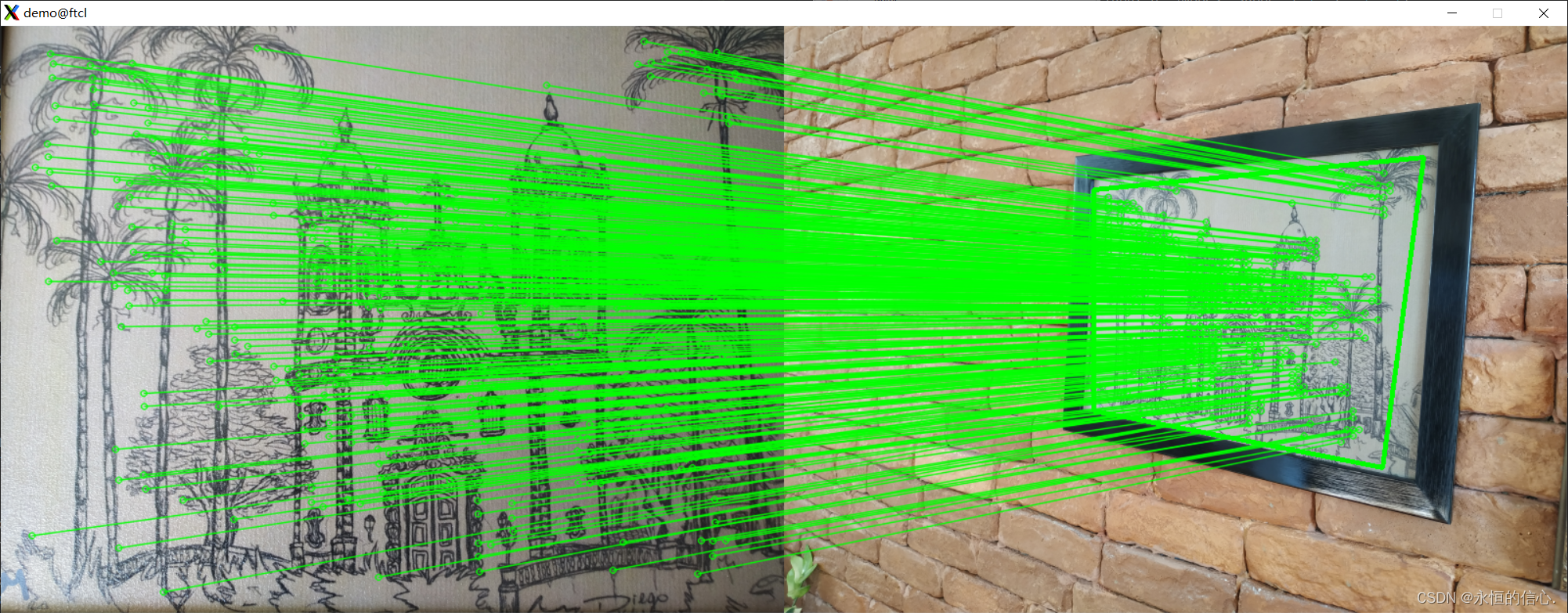















 3219
3219











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









