







✅作者简介:热爱科研的Matlab仿真开发者,擅长数据处理、建模仿真、程序设计、完整代码获取、论文复现及科研仿真。
🍎 往期回顾关注个人主页:Matlab科研工作室
🍊个人信条:格物致知,完整Matlab代码及仿真咨询内容私信。
🔥 内容介绍
无人机技术的发展已经成为了当今科技领域中的热门话题之一。无人机在军事、民用、商业等领域都有着广泛的应用,其中无人机的路径规划技术更是无人机应用中的关键技术之一。在复杂环境下,无人机需要具备避障能力,能够规划出安全可靠的飞行路径。本文将介绍基于人工蜂鸟算法(AHA)实现复杂环境下无人机避障三维航迹规划的技术原理和方法。
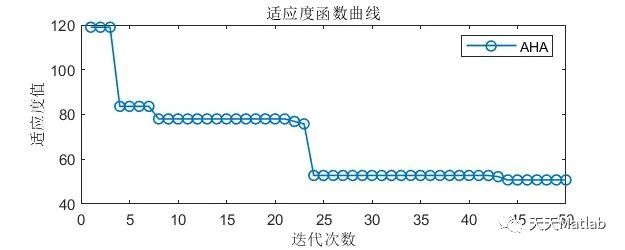
首先,让我们来了解一下人工蜂鸟算法(AHA)。人工蜂鸟算法是一种模拟蜂鸟觅食行为的智能优化算法,它模拟了蜂鸟在寻找花蜜时的行为,通过觅食的过程来寻找最优解。人工蜂鸟算法具有全局寻优能力强、收敛速度快等特点,适用于解决复杂的优化问题。在无人机路径规划中,人工蜂鸟算法可以帮助无人机快速找到避障的最优路径,提高飞行效率和安全性。
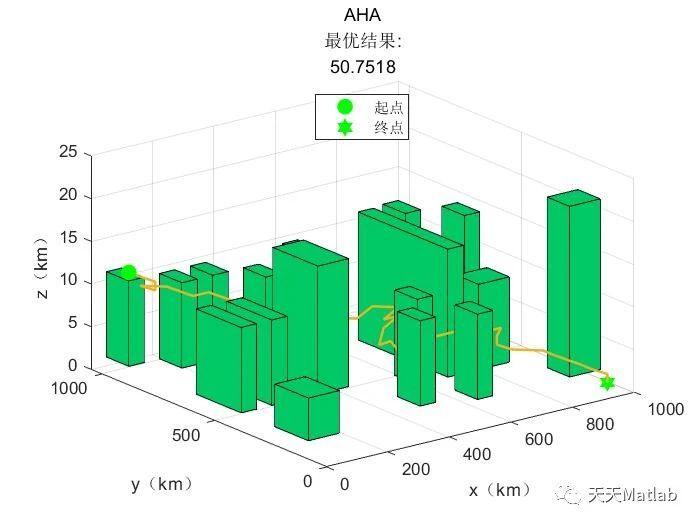
在实现基于人工蜂鸟算法的无人机三维路径规划过程中,首先需要构建无人机所处环境的模型。这个模型可以通过传感器获取环境中的障碍物信息,并将其转化为数字化的地图。然后,利用人工蜂鸟算法来规划无人机的飞行路径。人工蜂鸟算法通过模拟蜂鸟觅食的行为,不断地搜索周围的空间,找到避开障碍物的最优路径。在搜索过程中,人工蜂鸟算法会根据路径的长度、飞行速度、飞行高度等因素来评估路径的优劣,并不断地优化路径,直到找到最优解。
除了基于人工蜂鸟算法的无人机三维路径规划方法,还有其他一些常用的无人机路径规划算法,比如A算法、D算法等。这些算法都有各自的特点和适用范围,可以根据具体的应用场景来选择合适的算法。
在实际应用中,无人机三维路径规划技术已经被广泛应用于航拍、搜救、农业植保等领域。通过合理的路径规划,无人机可以避开障碍物,安全、高效地完成任务。未来随着无人机技术的不断发展,无人机三维路径规划技术也将会得到进一步的完善和提升,为无人机的应用提供更加可靠的技术支持。
综上所述,基于人工蜂鸟算法的无人机三维路径规划技术具有很高的实用价值和发展前景。通过模拟蜂鸟觅食的行为,人工蜂鸟算法可以帮助无人机快速找到避障的最优路径,提高飞行效率和安全性。随着无人机技术的不断发展,相信无人机三维路径规划技术将会在更多的领域得到应用,为人们的生产生活带来更多的便利和效益。
📣 部分代码
function DrawPic(result1,data,str)figureplot3(data.S0(:,1)*data.unit(1),data.S0(:,2)*data.unit(2),data.S0(:,3)*data.unit(3),'o','LineWidth',1.5,...'MarkerEdgeColor','g',...'MarkerFaceColor','g',...'MarkerSize',8)hold onplot3(data.E0(:,1)*data.unit(1),data.E0(:,2)*data.unit(2),data.E0(:,3)*data.unit(3),'h','LineWidth',1.5,...'MarkerEdgeColor','g',...'MarkerFaceColor','g',...'MarkerSize',8)plot3(result1.path(:,1).*data.unit(1),result1.path(:,2).*data.unit(2),result1.path(:,3).*data.unit(3),'-','LineWidth',1.5,...'MarkerEdgeColor','g',...'MarkerFaceColor','g',...'MarkerSize',10)for i=1:data.numObstaclesx=1+data.Obstacle(i,1);y=1+data.Obstacle(i,2);z=1+data.Obstacle(i,3);long=data.Obstacle(i,4);wide=data.Obstacle(i,5);pretty=data.Obstacle(i,6);x0=ceil(x/data.unit(1))*data.unit(1);y0=ceil(y/data.unit(2))*data.unit(2);z0=ceil(z/data.unit(3))*data.unit(3);long0=ceil(long/data.unit(1))*data.unit(1);wide0=ceil(wide/data.unit(2))*data.unit(2);pretty0=ceil(pretty/data.unit(3))*data.unit(3);[V,F] = DrawCuboid(long0, wide0, pretty0, x0,y0,z0);endlegend('起点','终点','location','north')grid on%axis equalxlabel('x(km)')ylabel('y(km)')zlabel('z(km)')title([str, '最优结果:', num2str(result1.fit)])% figure% plot3(data.S0(:,1)*data.unit(1),data.S0(:,2)*data.unit(2),data.S0(:,3)*data.unit(3),'o','LineWidth',2,...% 'MarkerEdgeColor','r',...% 'MarkerFaceColor','r',...% 'MarkerSize',10)% hold on% plot3(data.E0(:,1)*data.unit(1),data.E0(:,2)*data.unit(2),data.E0(:,3)*data.unit(3),'h','LineWidth',2,...% 'MarkerEdgeColor','r',...% 'MarkerFaceColor','r',...% 'MarkerSize',10)% plot3(result1.path(:,1).*data.unit(1),result1.path(:,2).*data.unit(2),result1.path(:,3).*data.unit(3),'-','LineWidth',2,...% 'MarkerEdgeColor','k',...% 'MarkerFaceColor','r',...% 'MarkerSize',10)% for i=1:data.numObstacles% x=1+data.Obstacle(i,1);% y=1+data.Obstacle(i,2);% z=1+data.Obstacle(i,3);% long=data.Obstacle(i,4);% wide=data.Obstacle(i,5);% pretty=data.Obstacle(i,6);%% x0=ceil(x/data.unit(1))*data.unit(1);% y0=ceil(y/data.unit(2))*data.unit(2);% z0=ceil(z/data.unit(3))*data.unit(3);% long0=ceil(long/data.unit(1))*data.unit(1);% wide0=ceil(wide/data.unit(2))*data.unit(2);% pretty0=ceil(pretty/data.unit(3))*data.unit(3);% [V,F] = DrawCuboid(long0, wide0, pretty0, x0,y0,z0);% end% legend('起点','终点','location','north')% grid on% xlabel('x(km)')% ylabel('y(km)')% zlabel('z(km)')% title([str, '最优结果:', num2str(result1.fit)])end
⛳️ 运行结果
🔗 参考文献
[1] 刘艳,李文波,刘新彪,等.复杂环境下无人机三维航迹规划及避障算法[J].电光与控制, 2023, 30(5):93-98.
[2] 黄鹤,高永博,茹锋,等.基于自适应黏菌算法优化的无人机三维路径规划[J].上海交通大学学报, 2023(010):057.
[3] 徐宏飞.面向智慧避障的物流无人机航迹规划研究[D].北京交通大学,2019.


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









