







此文章为【我是土堆 - Pytorch教程】 知识点 学习总结笔记(三)包括:torchvision中的数据集使用、DataLoader 的使用、神经网络的基本骨架 - nn.Module 的使用、土堆说卷积操作(可选看)、 神经网络 - 卷积层、神经网络 - 最大池化的使用。
学习系列笔记(已完结):
【我是土堆 - Pytorch教程】 知识点 学习总结笔记(一)_耿鬼喝椰汁的博客-CSDN博客
【我是土堆 - Pytorch教程】 知识点 学习总结笔记(二)_耿鬼喝椰汁的博客-CSDN博客
【我是土堆 - Pytorch教程】 知识点 学习总结笔记(三)_耿鬼喝椰汁的博客-CSDN博客
【我是土堆 - Pytorch教程】 知识点 学习总结笔记(四)_耿鬼喝椰汁的博客-CSDN博客
【我是土堆 - Pytorch教程】 知识点 学习总结笔记(五)_耿鬼喝椰汁的博客-CSDN博客
目录
如何把数据集(多张图片)和 transforms 结合在一起
一、torchvision中的数据集使用
需要学习知识:
- 1. 如何把数据集(多张图片)和 transforms 结合在一起。
- 2. 标准数据集如何下载、查看、使用。

进入torchvision后左上角选择0.9.0版本,就与视频中页面一致啦!

网站地址:torchvision-0.9.0
各个模块作用
如:COCO 目标检测、语义分割;MNIST 手写文字;CIFAR 物体识别
输入输出模块,不常用
提供一些比较常见的神经网络,有的已经预训练好,比较重要,后面会使用到,如分类模型、语义分割模型、目标检测、视频分类等
torchvision提供的一些比较少见的特殊的操作,基本不常用
之前讲解过
提供一些常用的小工具,如TensorBoard
本节主要讲解torchvision.datasets,以及它如何跟transforms联合使用
CIFAR10数据集

1.数据集如何下载
#如何使用torchvision提供的标准数据集
import torchvision
train_set=torchvision.datasets.CIFAR10(root="./dataset",train=True,download=True) #root使用相对路径,会在该.py所在位置创建一个叫dataset的文件夹,同时把数据保存进去。用Ctrl加P查看需要参数。
test_set=torchvision.datasets.CIFAR10(root="./dataset",train=False,download=True)
运行结果:

数据集下载过慢时:
获得下载链接后,把下载链接放到迅雷中,会首先下载压缩文件tar.gz,之后会对该压缩文件进行解压,里面会有相应的数据集。
采用迅雷下载完毕后,在PyCharm里新建directory,名字也叫dataset,再将下载好的压缩包复制进去,download依然为True,运行后,会自动解压该数据
2.数据集如何查看与使用
import torchvision
train_set=torchvision.datasets.CIFAR10(root="./dataset",train=True,download=True)
test_set=torchvision.datasets.CIFAR10(root="./dataset",train=False,download=True)
print(test_set[0]) # 查看测试集中的第一个数据,是一个元组:(img, target)
print(test_set.classes) # 列表
img,target = test_set[0]
print(img)
print(target) # 输出:3。输出为列表第几个类别。从0开始数,这里类别为cat列表第四个
print(test_set.classes[target]) # cat
img.show()结果弹出图片
3.CIFAR10数据集 介绍
CIFAR10 数据集包含了6万张32×32像素的彩色图片,图片有10个类别,每个类别有6千张图像,其中有5万张图像为训练图片,1万张为测试图片。

如何把数据集(多张图片)和 transforms 结合在一起
CIFAR10数据集原始图片是PIL Image,如果要给pytorch使用,需要转为tensor数据类型(转成tensor后,就可以用tensorboard了)
transforms 更多地是用在 datasets 里 transform 的选项中
import torchvision
from torch.utils.tensorboard import SummaryWriter
#把dataset_transform运用到数据集中的每一张图片,都转为tensor数据类型
dataset_transform = torchvision.transforms.Compose([
torchvision.transforms.ToTensor()
])
train_set=torchvision.datasets.CIFAR10(root="./dataset",train=True,transform=dataset_transform,download=True) #root使用相对路径,会在该.py所在位置创建一个叫dataset的文件夹,同时把数据保存进去
test_set=torchvision.datasets.CIFAR10(root="./dataset",train=False,transform=dataset_transform,download=True)
# print(test_set[0])
writer = SummaryWriter("p10")
#显示测试数据集中的前10张图片
for i in range(10):
img,target = test_set[i]
writer.add_image("test_set",img,i) # img已经转成了tensor类型
writer.close()运行后在 terminal 里输入
tensorboard --logdir="p10"
二、DataLoader 的使用
- dataset:告诉程序中数据集的位置,数据集中索引,数据集中有多少数据(想象成一叠扑克牌)
- dataloader:加载器,将数据加载到神经网络中,每次从dataset中取数据,通过dataloader中的参数可以设置如何取数据(想象成抓的一组牌)
torch.utils.data — PyTorch 2.0 documentation
参数介绍
参数如下(大部分有默认值,实际中只需要设置少量的参数即可):
- dataset:只有dataset没有默认值,只需要将之前自定义的dataset实例化,再放到dataloader中即可
- batch_size:每次抓牌抓几张
- shuffle:打乱与否,值为True的话两次打牌时牌的顺序是不一样。默认为False,但一般用True
- num_workers:加载数据时采用单个进程还是多个进程,多进程的话速度相对较快,默认为0(主进程加载)。Windows系统下该值>0会有问题(报错提示:BrokenPipeError)
- drop_last:100张牌每次取3张,最后会余下1张,这时剩下的这张牌是舍去还是不舍去。值为True代表舍去这张牌、不取出,False代表要取出该张牌

示例
import torchvision
from torch.utils.data import DataLoader
#准备的测试数据集
test_data = torchvision.datasets.CIFAR10("dataset",train=False,transform=torchvision.transforms.ToTensor)
test_loader = DataLoader(dataset=test_data,batch_size=4,shuffle=True,num_workers=0,drop_last=False)
#测试数据集中第一张图片及target
img,target = test_data[0]
print(img.shape)
print(target)输出结果:
torch.Size([3, 32, 32]) #三通道,32×32大小
3 #类别为3dataset
- __getitem()__:return img,target
dataloader(batch_size=4):从dataset中取4个数据
- img0,target0 = dataset[0]
- img1,target1 = dataset[1]
- img2,target2 = dataset[2]
- img3,target3 = dataset[3]
把 img 0-3 进行打包,记为imgs;target 0-3 进行打包,记为targets;作为dataloader中的返回
for data in test_loader:
imgs,targets = data
print(imgs.shape)
print(targets)输出:
torch.Size([4, 3, 32, 32]) #4张图片,三通道,32×32
tensor([0, 4, 4, 8]) #4个target进行一个打包数据是随机取的(断点debug一下,可以看到采样器sampler是随机采样的),所以两次的 target 0 并不一样
batch_size
# 用上节课torchvision提供的自定义的数据集
# CIFAR10原本是PIL Image,需要转换成tensor
import torchvision.datasets
from torch.utils.data import DataLoader
from torch.utils.tensorboard import SummaryWriter
# 准备的测试数据集
test_data = torchvision.datasets.CIFAR10("./dataset",train=False,transform=torchvision.transforms.ToTensor())
# 加载测试集
test_loader = DataLoader(dataset=test_data,batch_size=64,shuffle=True,num_workers=0,drop_last=False)
#batch_size=4,意味着每次从test_data中取4个数据进行打包
writer = SummaryWriter("dataloader")
step=0
for data in test_loader:
imgs,targets = data #imgs是tensor数据类型
writer.add_images("test_data",imgs,step)
step=step+1
writer.close()运行后在 terminal 里输入:
tensorboard --logdir="dataloader"运行结果如图,滑动滑块即是每一次取数据时的batch_size张图片:

由于 drop_last 设置为 False,所以最后16张图片(没有凑齐64张)显示如下:

drop_last
若将 drop_last 设置为 True,最后16张图片(step 156)会被舍去,结果如图:

shuffle
一个 for data in test_loader 循环,就意味着打完一轮牌(抓完一轮数据),在下一轮再进行抓取时,第二次数据是否与第一次数据一样。值为True的话,会重新洗牌(一般都设置为True)
shuffle为False的话两轮取的图片是一样的
在外面再套一层 for epoch in range(2) 的循环
# shuffle为True
for epoch in range(2):
step=0
for data in test_loader:
imgs,targets = data #imgs是tensor数据类型
writer.add_images("Epoch:{}".format(epoch),imgs,step)
step=step+1结果如下:
可以看出两次 step 155 的图片不一样

三、神经网络的基本骨架 - nn.Module 的使用
Pytorch官网左侧:Python API(相当于package,提供了一些不同的工具)
关于神经网络的工具主要在torch.nn里
网站地址:torch.nn — PyTorch 1.8.1 documentation

Containers
Containers 包含6个模块:
- Module
- Sequential
- ModuleList
- ModuleDict
- ParameterList
- ParameterDict

其中最常用的是 Module 模块(为所有神经网络提供基本骨架)
CLASS torch.nn.Module #搭建的 Model都必须继承该类模板:
import torch.nn as nn
import torch.nn.functional as F
class Model(nn.Module): #搭建的神经网络 Model继承了 Module类(父类)
def __init__(self): #初始化函数
super(Model, self).__init__() #必须要这一步,调用父类的初始化函数
self.conv1 = nn.Conv2d(1, 20, 5)
self.conv2 = nn.Conv2d(20, 20, 5)
def forward(self, x): #前向传播(为输入和输出中间的处理过程),x为输入
x = F.relu(self.conv1(x)) #conv为卷积,relu为非线性处理
return F.relu(self.conv2(x))代码中比较重要:
前向传播 forward(在所有子类中进行重写)

反向传播 backward
实战
先介绍pycharm的实用工具

使用 Code —> Generate —> Override Methods 可以自动补全代码
例子:
import torch
from torch import nn
class Tudui(nn.Module):
def __init__(self):
super().__init__()
# def __init__(self):
# super(Tudui, self).__init__()
def forward(self,input):
output = input + 1
return output
tudui = Tudui() #拿Tudui模板创建出的神经网络
x = torch.tensor(1.0) #将1.0这个数转换成tensor类型
output = tudui(x)
print(output)结果如下:

debug看流程
在下列语句前打断点:
tudui = Tudui() #整个程序的开始然后点击蜘蛛,点击 Step into My Code,可以看到代码每一步的执行过程

四. 土堆说卷积操作(可选看)
这节来讲解卷积层 :Convolution Layers
先进入pytorch官方网站地址:torch.nn — PyTorch 1.8.1 documentation
主要讲解 nn.Conve2d ,pytorch官方网站地址:Conv2d — PyTorch 1.8.1 documentation
torch.nn 和 torch.nn.functional 的区别:前者是后者的封装,更利于使用
点击 torch.nn.functional - Convolution functions - conv2d 查看参数

stride(步进)
可以是单个数,或元组(sH,sW) — 控制横向步进和纵向步进
卷积操作
卷积操作介绍

当 stride = 2 时,横向和纵向都是2,输出是一个2×2的矩阵
卷积操作实战
要求输入的维度 & reshape函数

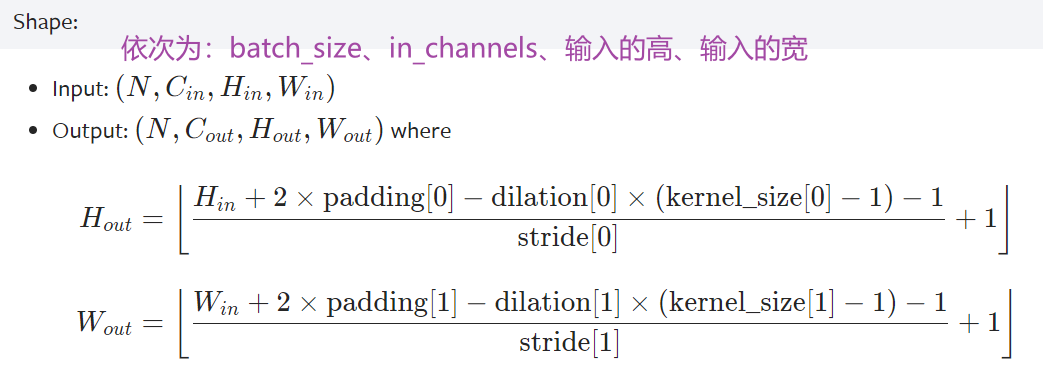
- input:尺寸要求是batch,几个通道,高,宽(4个参数)
- weight:尺寸要求是输出,in_channels(groups一般为1),高,宽(4个参数)
使用 torch.reshape 函数,将输入改变为要求输入的维度
实现上图代码
import torch
import torch.nn.functional as F
input =torch.tensor([[1,2,0,3,1],
[0,1,2,3,1],
[1,2,1,0,0],
[5,2,3,1,1],
[2,1,0,1,1]]) #将二维矩阵转为tensor数据类型
# 卷积核kernel
kernel = torch.tensor([[1,2,1],
[0,1,0],
[2,1,0]])
# 尺寸只有高和宽,不符合要求
print(input.shape) #5×5
print(kernel.shape) #3×3
# 尺寸变换为四个数字
input = torch.reshape(input,(1,1,5,5)) #通道数为1,batch大小为1
kernel = torch.reshape(kernel,(1,1,3,3))
print(input.shape)
print(kernel.shape)
output = F.conv2d(input,kernel,stride=1) # .conv2d(input:Tensor, weight:Tensor, stride)
print(output)输出结果为:

当将步进 stride 改为 2 时:
output2 = F.conv2d(input,kernel,stride=2)
print(output2)
padding(填充)
在输入图像左右两边进行填充,决定填充有多大。可以为一个数或一个元组(分别指定高和宽,即纵向和横向每次填充的大小)。默认情况下不进行填充
padding=1:将输入图像左右上下两边都拓展一个像素,空的地方默认为0

代码实现:
output3 = F.conv2d(input,kernel,stride=1,padding=1)
print(output3)
五、 神经网络 - 卷积层
pytorch官网网站卷积层(Convolution Layers):Convolution Layers
| 一维卷积 | Applies a 1D convolution over an input signal composed of several input planes. |
| 二维卷积 | Applies a 2D convolution over an input signal composed of several input planes. |
| 三维卷积 | Applies a 3D convolution over an input signal composed of several input planes. |
图像为二维矩阵,所以讲解 nn.Conv2d:
Conv2d — PyTorch 1.10 documentation

CLASS torch.nn.Conv2d(in_channels, out_channels, kernel_size, stride=1, padding=0, dilation=1, groups=1, bias=True, padding_mode='zeros', device=None, dtype=None)
# in_channels 输入通道数
# out_channels 输出通道数
# kernel_size 卷积核大小
#以上参数需要设置
#以下参数提供了默认值
# stride=1 卷积过程中的步进大小
# padding=0 卷积过程中对原始图像进行padding的选项
# dilation=1 每一个卷积核对应位的距离
# groups=1 一般设置为1,很少改动,改动的话为分组卷积
# bias=True 通常为True,对卷积后的结果是否加减一个常数的偏置
# padding_mode='zeros' 选择padding填充的模式参数含义:

( dilation 叫空洞卷积)
动图(演示地址): conv_arithmetic/README.md at master · vdumoulin/conv_arithmetic · GitHub

kernel_size
定义了一个卷积核的大小,若为3则生成一个3×3的卷积核
- 卷积核的参数是从一些分布中进行采样得到的
- 实际训练过程中,卷积核中的值会不断进行调整
in_channels & out_channels
- in_channels:输入图片的channel数(彩色图像 in_channels 值为3)
- out_channels:输出图片的channel数
in_channels 和 out_channels 都为 1 时,拿一个卷积核在输入图像中进行卷积
out_channels 为 2 时,卷积层会生成两个卷积核(不一定一样),得到两个输出,叠加后作为最后输出
CIFAR10数据集实例
# CIFAR10数据集
import torch
import torchvision
from torch import nn
from torch.nn import Conv2d
from torch.utils.data import DataLoader
from torch.utils.tensorboard import SummaryWriter
dataset = torchvision.datasets.CIFAR10("../data",train=False,transform=torchvision.transforms.ToTensor(),download=True) # 这里用测试数据集,因为训练数据集太大了
dataloader = DataLoader(dataset,batch_size=64)
# 搭建神经网络Tudui
class Tudui(nn.Module):
def __init__(self):
super(Tudui, self).__init__()
# 因为是彩色图片,所以in_channels=3
self.conv1 = Conv2d(in_channels=3,out_channels=6,kernel_size=3,stride=1,padding=0) #卷积层conv1
def forward(self,x): #输出为x
x = self.conv1(x)
return x
tudui = Tudui() # 初始化网络
# 打印一下网络结构
print(tudui) #Tudui((conv1): Conv2d(3, 6, kernel_size=(3, 3), stride=(1, 1)))
writer = SummaryWriter("../logs")
step = 0
for data in dataloader:
imgs,targets = data #经过ToTensor转换,成为tensor数据类型,可以直接送到网络中
output = tudui(imgs)
print(imgs.shape) #输入大小 torch.Size([64, 3, 32, 32]) batch_size=64,in_channels=3(彩色图像),每张图片是32×32的
print(output.shape) #经过卷积后的输出大小 torch.Size([64, 6, 30, 30]) 卷积后变成6个channels,但原始图像减小,所以是30×30的
writer.add_images("input",imgs,step)
# 6个channel无法显示。torch.Size([64, 6, 30, 30]) ——> [xxx,3,30,30] 第一个值不知道为多少时写-1,会根据后面值的大小进行计算
output = torch.reshape(output,(-1,3,30,30))
writer.add_images("output",output,step)
step = step + 1运行后(如果没启用环境),在 Terminal 里启动 pytorch 环境:
conda activate pytorch打开 tensorboard:
tensorboard --logdir=logs打开网址(卷积后得到的输出)

卷积层 vgg16

卷积前后维度计算公式
六、神经网络 - 最大池化的使用
池化层网站地址:torch.nn — PyTorch 1.8.1 documentation
- MaxPool:最大池化(下采样)
- MaxUnpool:上采样
- AvgPool:平均池化
- AdaptiveMaxPool2d:自适应最大池化
最常用:MaxPool2d — PyTorch 1.8.1 documentation
参数
CLASS torch.nn.MaxPool2d(kernel_size, stride=None, padding=0, dilation=1, return_indices=False, ceil_mode=False)
# kernel_size 池化核
( 注意,卷积中stride默认为1,而池化中stride默认为kernel_size )

ceil_mode参数

Ceil_mode 默认情况下为 False,对于最大池化一般只需设置 kernel_size 即可
输入输出维度计算公式

代码实现
上述图用代码实现:(以 Ceil_mode = True 为例)
import torch
from torch import nn
from torch.nn import MaxPool2d
input = torch.tensor([[1,2,0,3,1],
[0,1,2,3,1],
[1,2,1,0,0],
[5,2,3,1,1],
[2,1,0,1,1]],dtype=torch.float32) #最大池化无法对long数据类型进行实现,将input变成浮点数的tensor数据类型
input = torch.reshape(input,(-1,1,5,5)) #-1表示torch计算batch_size
print(input.shape)
# 搭建神经网络
class Tudui(nn.Module):
def __init__(self):
super(Tudui, self).__init__()
self.maxpool1 = MaxPool2d(kernel_size=3,ceil_mode=True)
def forward(self,input):
output = self.maxpool1(input)
return output
# 创建神经网络
tudui = Tudui()
output = tudui(input)
print(output)运行结果如下:

Ceil_mode = False 为例运行输出:(运行结果如下:)

为什么要进行最大池化?最大池化的作用是什么?
最大池化的目的是保留输入的特征,同时把数据量减小(数据维度变小),对于整个网络来说,进行计算的参数变少,会训练地更快,(池化最大的作用是增大感受野,让后面的卷积看到更全局的内容。)
- 如上面案例中输入是5x5的,但输出是3x3的,甚至可以是1x1的
- 类比:1080p的视频为输入图像,经过池化可以得到720p,也能满足绝大多数需求,传达视频内容的同时,文件尺寸会大大缩小
池化一般跟在卷积后,卷积层是用来提取特征的,一般有相应特征的位置是比较大的数字,最大池化可以提取出这一部分有相应特征的信息
池化不影响通道数
池化后一般再进行非线性激活
用数据集 CIFAR10 实现最大池化
代码如下:
import torch
import torchvision
from torch import nn
from torch.nn import MaxPool2d
from torch.utils.data import DataLoader
from torch.utils.tensorboard import SummaryWriter
dataset = torchvision.datasets.CIFAR10("../data",train=False,download=True,transform=torchvision.transforms.ToTensor())
dataloader = DataLoader(dataset,batch_size=64)
# 搭建神经网络
class Tudui(nn.Module):
def __init__(self):
super(Tudui, self).__init__()
self.maxpool1 = MaxPool2d(kernel_size=3,ceil_mode=True)
def forward(self,input):
output = self.maxpool1(input)
return output
# 创建神经网络
tudui = Tudui()
writer = SummaryWriter("../logs_maxpool")
step = 0
for data in dataloader:
imgs,targets = data
writer.add_images("input",imgs,step)
output = tudui(imgs) #output尺寸池化后不会有多个channel,原来是3维的图片,经过最大池化后还是3维的,不需要像卷积一样还要reshape操作(影响通道数的是卷积核个数)
writer.add_images("output",output,step)
step = step + 1
writer.close()运行后在 terminal 里输入(注意是在pytorch环境下):
tensorboard --logdir=logs_maxpool打开网址:

这篇课程的学习和总结到这里就结束啦,如果有什么问题可以在评论区留言呀~
如果帮助到大家,可以一键三连+关注支持下~
学习系列笔记(已完结):
【我是土堆 - Pytorch教程】 知识点 学习总结笔记(一)_耿鬼喝椰汁的博客-CSDN博客
【我是土堆 - Pytorch教程】 知识点 学习总结笔记(二)_耿鬼喝椰汁的博客-CSDN博客
【我是土堆 - Pytorch教程】 知识点 学习总结笔记(三)_耿鬼喝椰汁的博客-CSDN博客
















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









