




ORTI文件简介
ORTI是“OSEK运行时接口”(OSEK Run Time Interface)的缩写。ORTI被设计为提供一种标准化和可扩展的方式,让OSEK操作系统向调试器提供其行为的内部细节。ORTI可以支持除OSEK之外的其他操作系统。在RTA-OS中,提供了对OSEK OS和AUTOSAR OS特性的ORTI支持。
ORTI以一种精简的语言实现如下功能:
-
在运行中的操作系统中找到对象和变量;
-
显示或修改对象和变量的值。 操作系统可以生成一个包含这些信息描述的ORTI文件,调试器可以使用这个文件。这意味着ORTI就像一个符号表——告诉调试器内存中的哪些内容意味着操作系统中的哪些对象。
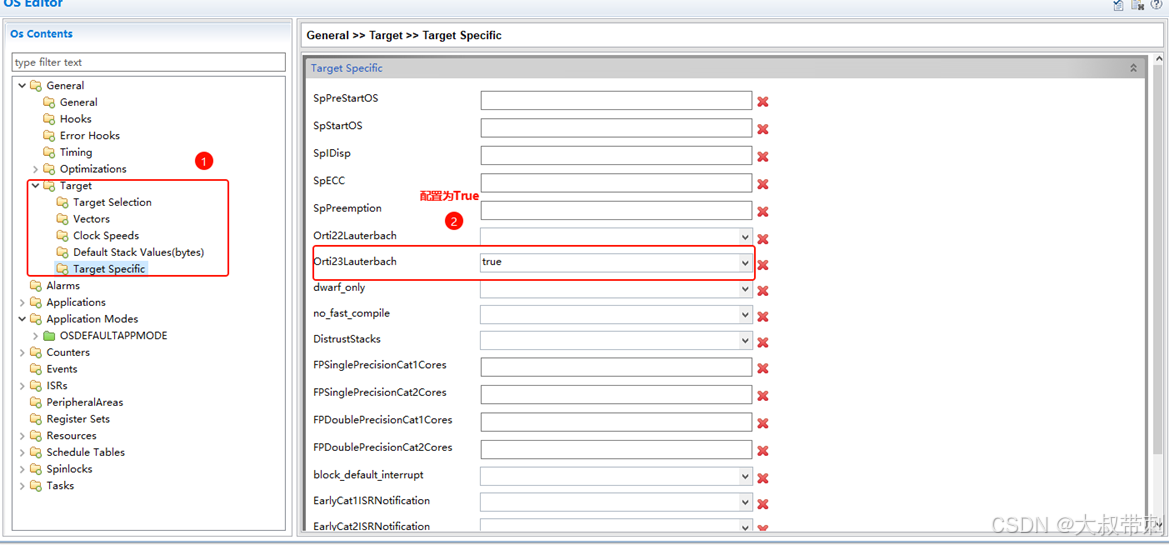
ORTI文件生成
ORTI文件需要在配置OS时使能才能正常生成,使能方法如下:
生成后的ORTI文件与OS生成的.a文件路径一致,如下:
ORTI文件使用
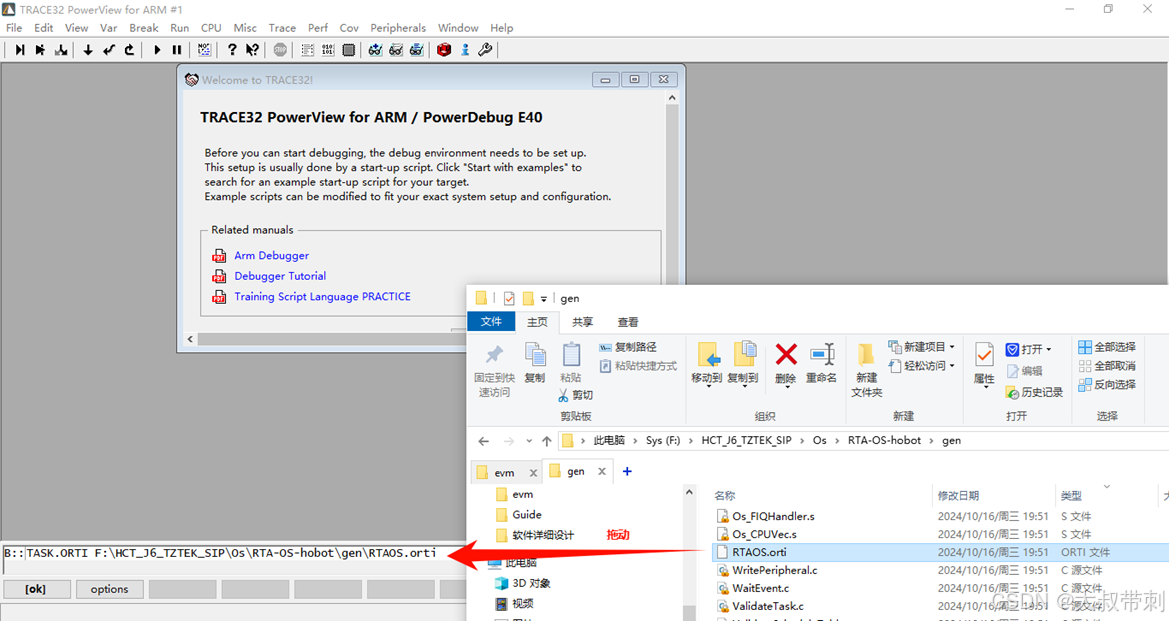
加载ORTI文件
将后缀为orti的文件拖动到劳德巴赫窗口的命令栏后按下回车按钮
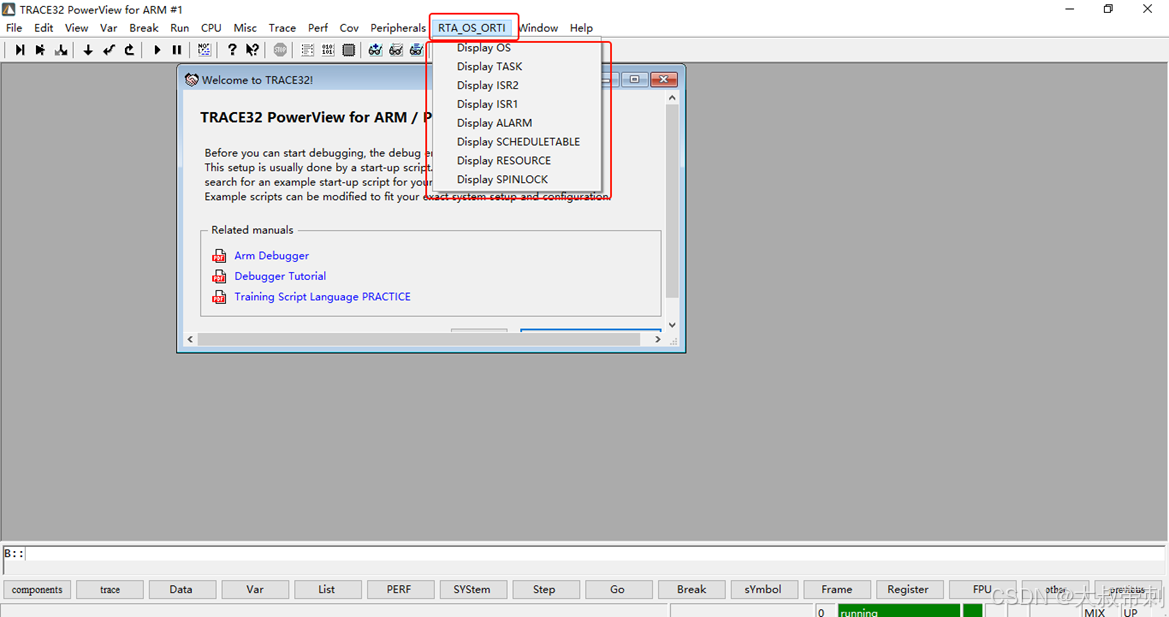
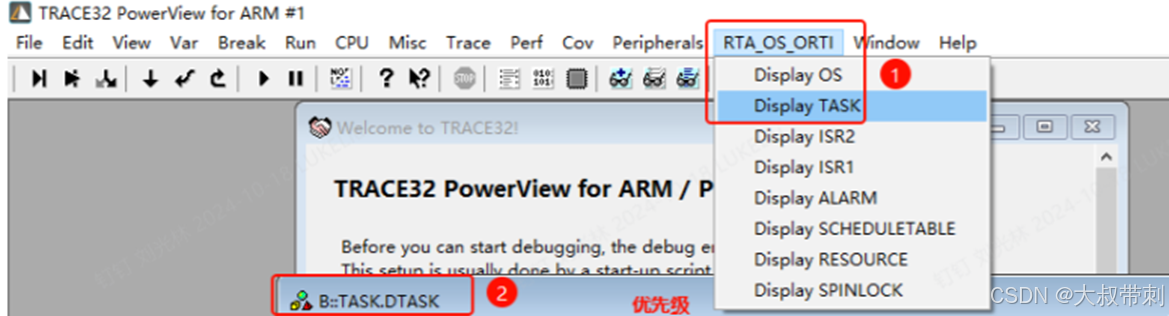
orti文件加载成功后可以在劳德巴赫的菜单栏看到一个【RTA_OS ORTI】的菜单,点击【RTA_OS ORTI】可以看到支持如下几个功能。
查看Task堆栈使用情况
点击菜单栏的【RTA_OS ROTI】,在展开的菜单中选择【Display TASK】
在弹出的新窗口中可以看到Task的优先级、使用的最大堆栈、所属的核等信息
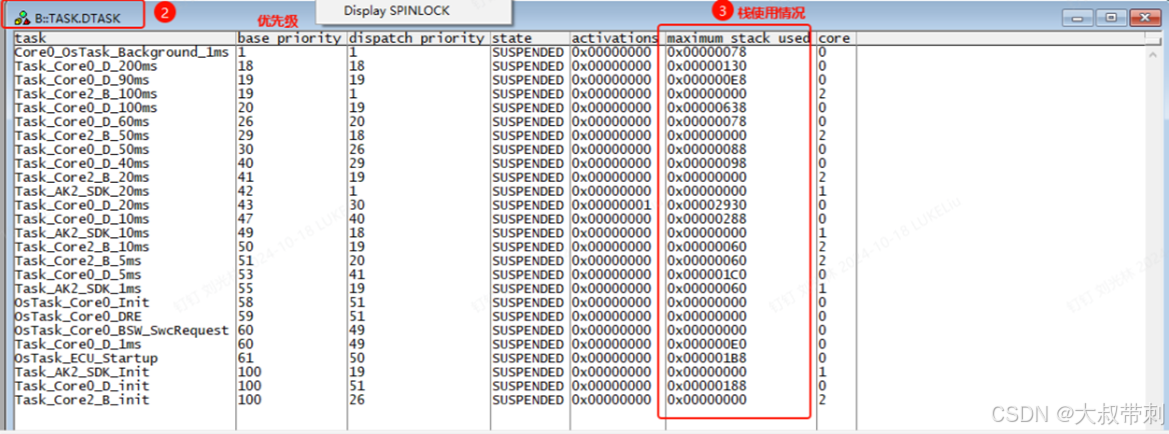
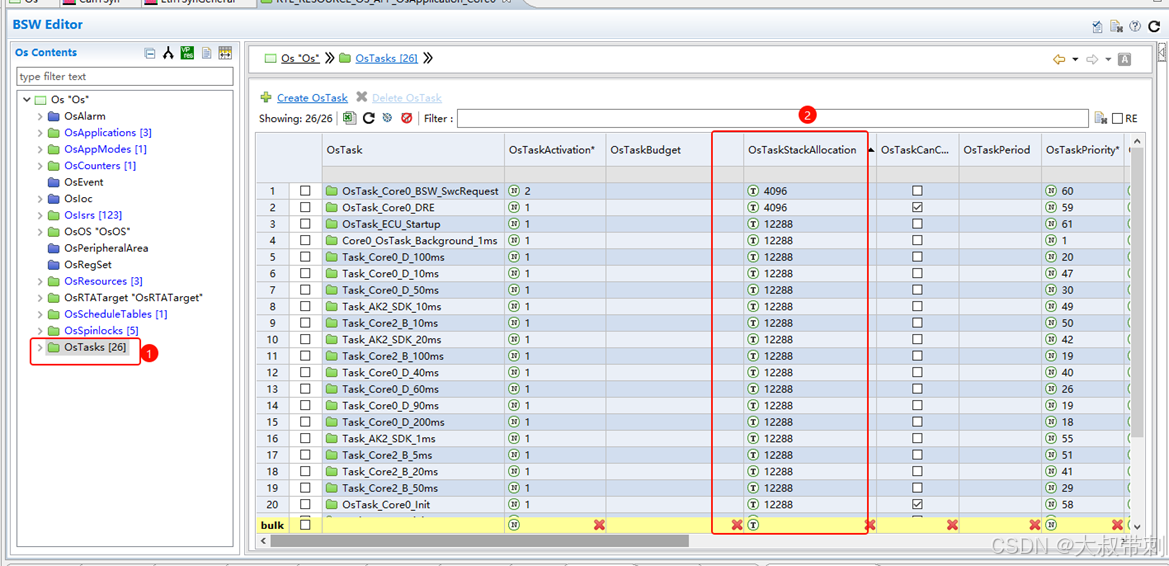
此窗口可以根据当前使用的最大堆栈与配置的堆栈做比较确认Task堆栈是否溢出,Task配置堆栈查看路径如下图:
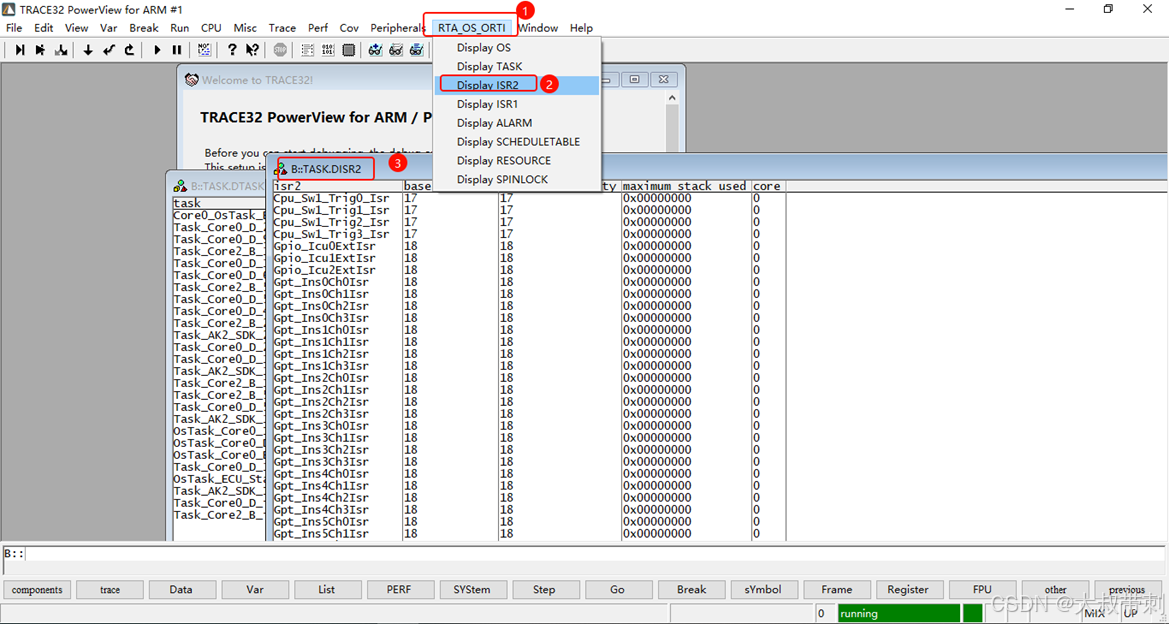
中断堆栈查看
中断堆栈查看方法与Task类似。
-
点击菜单栏的【RTA_OS ROTI】,在展开的菜单中选择【Display ISR2】,ISR2为二类中断,ISR1为一类中断,我们需要关注二类中断
-
在弹出的新窗口中可以看到TISR的优先级、使用的最大堆栈、所属的核等信息
-
同Task根据当前使用的最大堆栈与配置的堆栈做比较确认ISR堆栈是否溢出
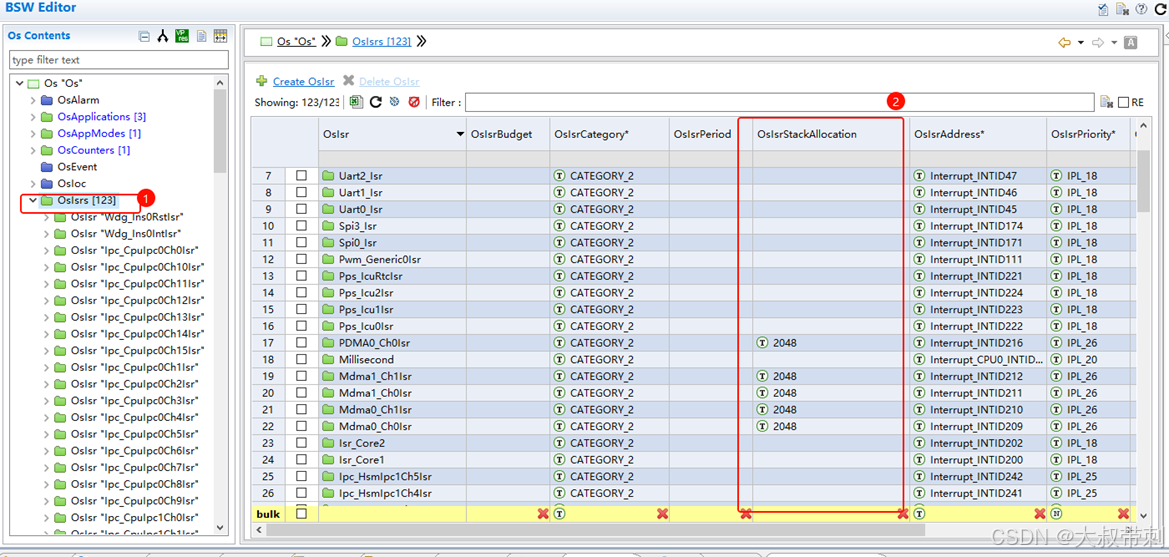
ISR配置堆栈查看路径如下图:
Task load查看
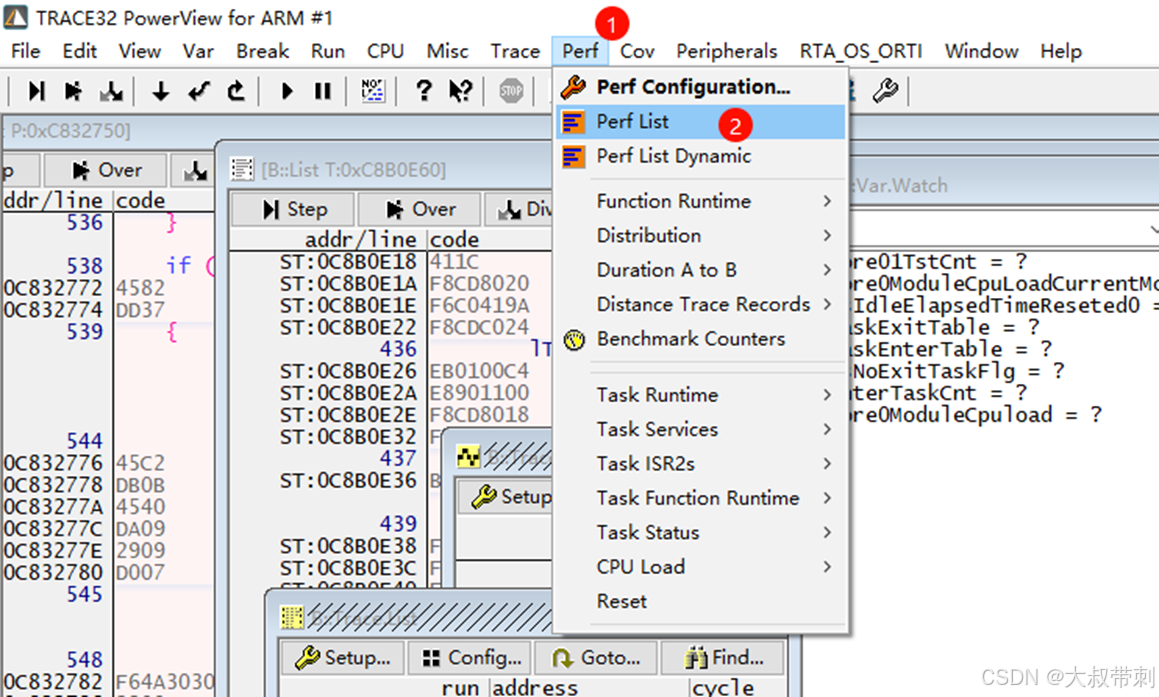
点击【Perf】后选择【Perf List】
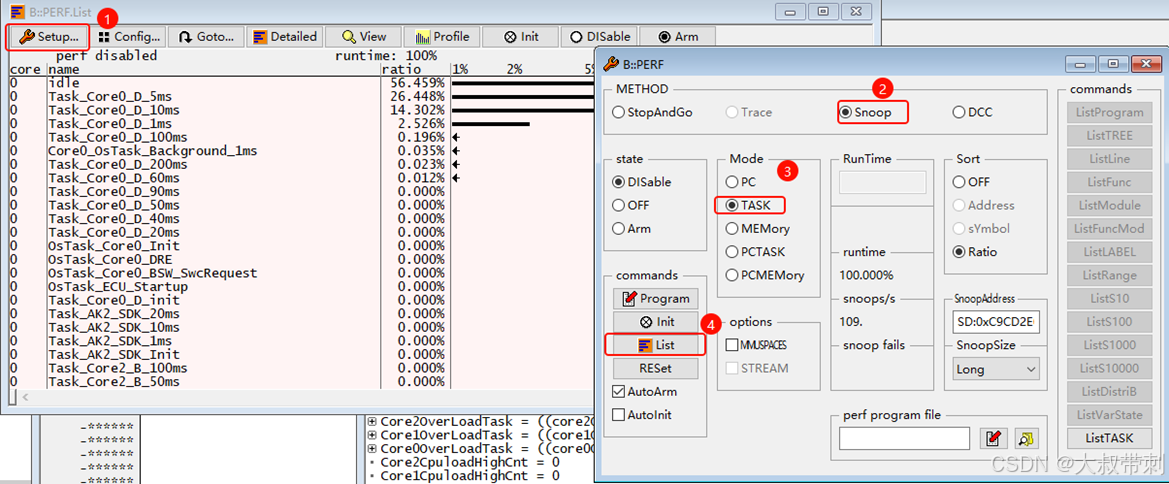
在弹出的窗口中选择【Setup】,在新弹出的窗口中依次选择【Snoop】、【Task】、【List】
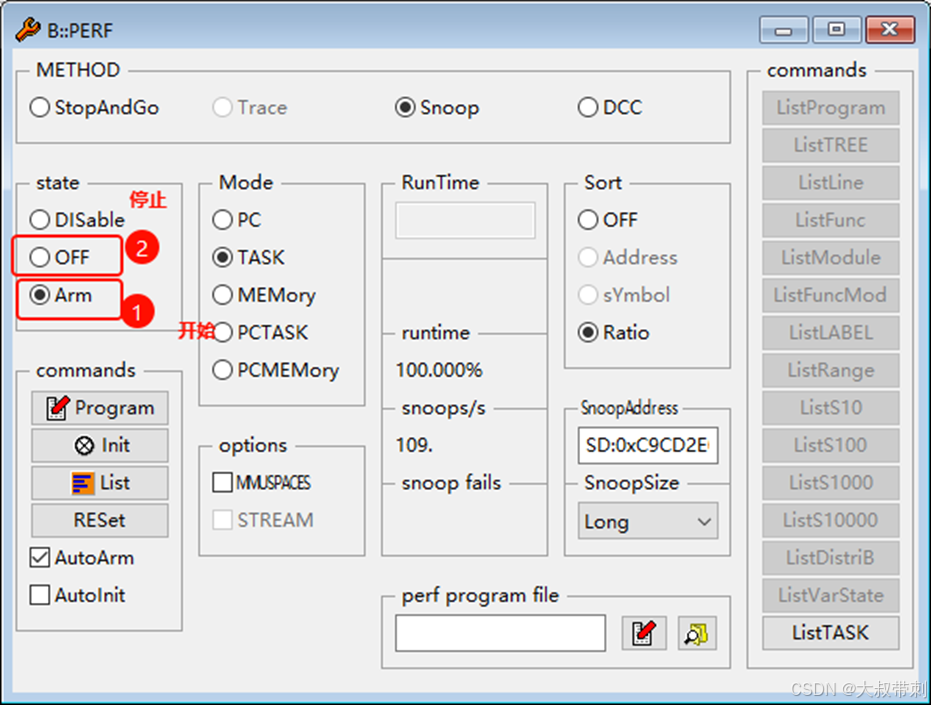
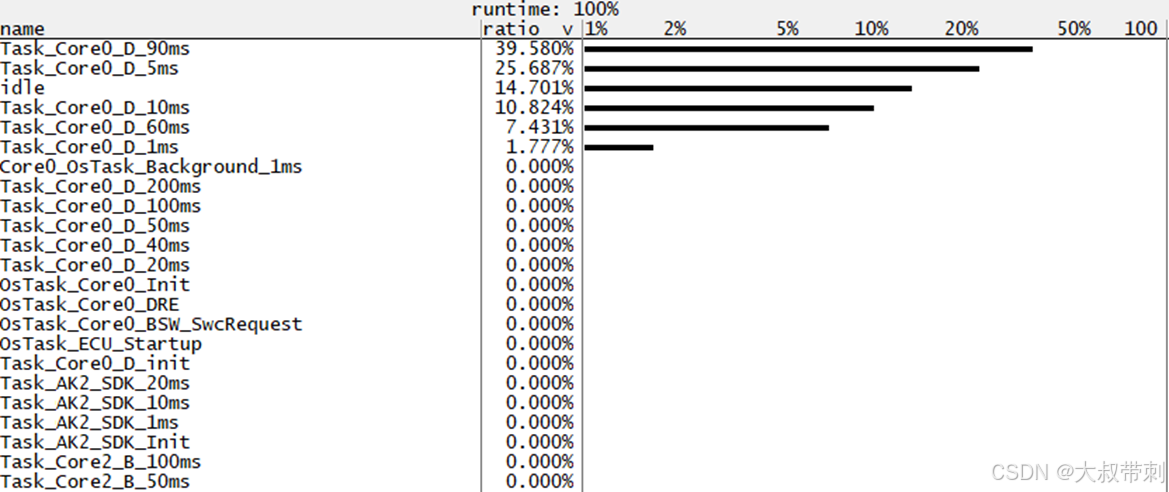
启动测试,在窗口中点击Arm
Task load如下



















 3761
3761

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











